| Автоматизированная система контроля в системе трансформаторных подстанций
Автоматизированная система контроля
Автоматизированная система (АС) — система, состоящая из персонала и комплекса средств автоматизации его деятельности, реализующая информационную технологию выполнения установленных функций. Автоматизированная система (АС) — это организованная совокупность средств, методов и мероприятий, используемых для регулярной обработки информации для решения задачи.
Главной целью создания АС является не упрощение, но категоризация и стандартизация автоматизируемого процесса, что позволяет обеспечивать стабильность работы системы, прозрачность её контроля и анализа слабых мест и основания для её развития либо свёртывания (списания, замены).
В случае правильной автоматизации деятельности организаций, она упрощает принятие решений и уменьшает требуемое время для решения проблем для руководителей любого уровня.
Измеряемые параметры
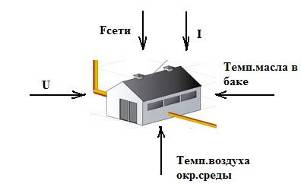
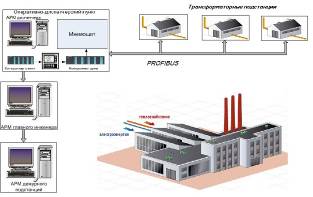
Структурная схема автоматизированной системы контроля в системе трансформаторных подстанций.
Трансформаторная подстанция - это электроустановка, предназначенная для преобразования (повышения или понижения) напряжения в сети переменного тока и распределения электроэнергии. Обычно она состоит из силовых трансформаторов, распределительного устройства, устройства автоматического управления и защиты, а так же вспомогательные сооружений.
Диспетчерский пункт, центр системы диспетчерского управления, где сосредоточивается информация о состоянии производства. Размеры и оснащённость Д. п. зависят от вида и характера контролируемых процессов и объектов управления. На Д. п. энергосистемы основное значение имеют автоматическая сигнализация и измерения, требующие непрерывного наблюдения.
Диспетчеризация направлена на обеспечение равномерности загрузки всех звеньев предприятия, непрерывности, ритмичности и экономичности выполнения всех процессов основного производственного цикла, бесперебойной работы вспомогательных и обслуживающих участков. В задачу Д. входит регулирование процесса производства с целью восстановления действующих или установления новых пропорций и ритма работы предприятия. Д. охватывает контроль и управление технологическими процессами, контроль и оперативное распределение материальных и энергетических ресурсов. Д. в энергетике осуществляет оперативное управление электростанциями, подстанциями, линиями электропередачи и отдельными крупными установками потребителей. Диспетчерская служба призвана обеспечить бесперебойность и надёжность работы энергосистемы, распределение электроэнергии в соответствии с графиком нагрузки, поддержание установленных для энергосистемы параметров (напряжение, частота в электросети, температура и давление пара и температура воды в тепловых сетях).
Реклама

Связь между трансформаторными подстанциями и диспетчерским пунктом осуществляется с помощью PROFIBUS.
PROFIBUS ((PROcess FIeld BUS)) (читается — Профи бас) — открытая промышленная сеть, прототип которой был разработан компанией Siemens AG для своих промышленных контроллеров SIMATIC, на основе этого прототипа Организация пользователей Profibus разработала международные стандарты, принятые затем некоторыми национальными комитетами по стандартизации. Сеть PROFIBUS это комплексное понятие, она основывается на нескольких стандартах и протоколах. Сеть отвечает требованиям международных стандартов IEC 61158 и EN 50170.
PROFIBUS объединяет технологические и функциональные особенности последовательной связи полевого уровня. Она позволяет объединять разрозненные устройства автоматизации в единую систему на уровне датчиков и приводов.
PROFIBUS использует обмен данными между ведущим и ведомыми устройствами (протоколы DP и PA) или между несколькими ведущими устройствами (протоколы FDL и FMS). Требования пользователей к получению открытой, независимой от производителя системе связи, базируется на использовании стандартных протоколов PROFIBUS.
Сеть PROFIBUS построена в соответствии с многоуровневой моделью ISO 7498 — OSI. PROFIBUS определяет следующие уровни:
1 — физический уровень — отвечает за характеристики физической передачи
2 — канальный уровень — определяет протокол доступа к шине
3 — уровень приложений — отвечает за прикладные функции.
Открытость и независимость от производителя гарантирует стандарт EN 50170, все остальное реализовано в соответствии со стандартом DIN 19245 (а именно: техника передачи данных, методы доступа, протоколы передачи, сервисные интерфейсы для уровня приложений, спецификация протоколов, кодирование, коммуникационная модель и т. д.). С помощью PROFIBUS, устройства разных производителей могут работать друг с другом без каких-либо специальных интерфейсов. Семейство PROFIBUS состоит из трех совместимых друг с другом версий: PROFIBUS PA, PROFIBUS DP и PROFIBUS FMS.
Реклама

Физически PROFIBUS может представлять из себя:
- электрическая сеть с шинной топологией, использующая экранированную витую пару, соответствующая стандарту RS-485.
- оптическая сеть на основе оптоволоконного кабеля.
- инфракрасная сеть.
Скорость передачи по ней может варьироваться от 9,6 Кбит/сек до 12 Мбит/сек.
Для всех версий PROFIBUS существует единый протокол доступа к шине. Этот протокол реализуется на 2 уровне модели OSI (который называется в PROFIBUS-FDL). Данный протокол реализует процедуру доступа с помощью маркера (token). Сеть PROFIBUS состоит из ведущих (master) и ведомых (slave) станций. Ведущая станция может контролировать шину, то есть может передавать сообщения (без удалённых запросов), когда она имеет право на это (то есть когда у неё есть маркер). Ведомая станция может лишь распознавать полученные сообщения или передавать данные после соответствующего запроса. Маркер циркулирует в логическом кольце, состоящем из ведущих устройств. Если сеть состоит только из одного ведущего, то маркер не передаётся (в таком случае в чистом виде реализуется система master-slave). Сеть в минимальной конфигурации может состоять либо из двух ведущих, либо из одного ведущего и одного ведомого устройства.
Одни и те же каналы связи сети PROFIBUS допускают одновременное использование нескольких протоколов передачи данных:
PROFIBUS DP (Decentralized Peripheral - Распределенная периферия) — протокол, ориентированный на обеспечение скоростного обмена данными между:
- системами автоматизации (ведущими DP-устройствами)
- устройствами распределённого ввода-вывода (ведомыми DP-устройствами).
Протокол характеризуется минимальным временем реакции и высокой стойкостью к воздействию внешних электромагнитных полей. Оптимизирован для высокоскоростных и недорогих систем. Эта версия сети была спроектирована специально для связи между автоматизированными системами управления и распределенной периферией. Электрически близка к RS-485, но сетевые карты используют 2-х портовую рефлективную память, что позволяет устройствам обмениваться данными без загрузки процессора контроллера.
PROFIBUS PA (Process Automation - Автоматизация процесса) — протокол обмена данными с оборудованием полевого уровня, расположенным в обычных или Ex-зонах (взрывоопасных зонах). Протокол отвечает требованиям международного стандарта IEC 61158-2. Позволяет подключать датчики и приводы на одну линейную шину или кольцевую шину.
PROFIBUS FMS (Fieldbus Message Specification - Спецификация сообщений полевого уровня) — универсальный протокол для решения задач по обмену данными между интеллектуальными сетевыми устройствами (контроллерами, компьютерами/программаторами, системами человеко-машинного интерфейса) на полевом уровне. Некоторый аналог промышленного Ethernet, обычно используется для высокоскоростной связи между контроллерами и компьютерами верхнего уровня и используемыми диспетчерами. Скорость до 12 Мбит/с.
Все протоколы используют одинаковые технологии передачи данных и общий метод доступа к шине, поэтому они могут функционировать на одной шине.
Структурная схема основного блока контроля трансформаторных подстанций.
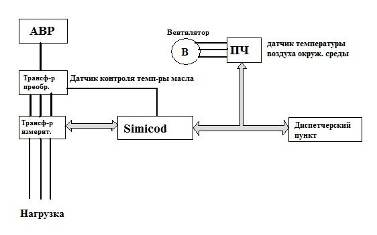
Реле — электромагнитный аппарат (переключатель), предназначенный для коммутации электрических цепей (скачкообразного изменения выходных величин) при заданных изменениях электрических или не электрических входных величин. Широко используется в различных автоматических устройствах.
Важным свойством реле является возможность дистанционного управления различными объектами с помощью достаточно небольших токов и напряжений.
Измерительный трансформатор — электрический трансформатор, в котором при нормальных условиях применения вторичный ток (вторичное напряжение) практически пропорционален (пропорционально) первичному току (первичному напряжению), применяется в качестве измерительного преобразователя при измерениях больших токов, напряжений. У измерительных трансформаторов переменного тока при правильном включении разность фазовых углов на первичной и вторичной обмотках близка к нулю.
Принцип действия измерительного трансформатора постоянного тока аналогичен принципу действия магнитного усилителя. Такой прибор представляет собой ферромагнитный сердечник с двумя обмотками — постоянного и переменного тока, вспомогательный источник переменного тока и выпрямительное устройство. Подмагничивание сердечника с помощью входного постоянного тока ведёт к изменению магнитной проницаемости сердечника, что приводит, в свою очередь к изменению индуктивного сопротивления в обмотке переменного тока и изменению силы этого тока, выходной сигнал формируется с помощью нагрузочных резисторов в цепи переменного тока и выпрямителя.
«Частота» — режим поддержания заданного значения частоты. Задание частоты может производиться с пульта управления, входа «задатчика» (аналогового входа) или комбинацией сигналов дискретных входов. Преобразователь непрерывно отслеживает сигнал задания частоты и изменяет в соответствии с ним свою выходную частоту.
Последние модели преобразователей многих производителей наряду с частотным реализуют также векторное управление асинхронным электродвигателем. Это способ управления асинхронным двигателем, превосходящий по точности регулирования обычное частотное управление. Его применяют там, где требуется поддерживать момент на валу двигателя при малых скоростях вращения или обеспечить стабильную скорость при скачках нагрузки.
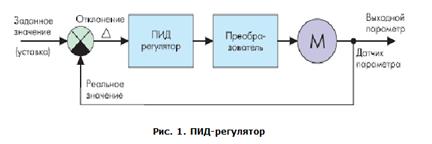
«Параметр» — работа преобразователя частоты в режиме стабилизации внешнего параметра. Система стабилизации внешнего параметра строится на основе ПИД-регулятора, на входы которого подаются сигнал задания параметра (уставки) и сигнал с датчика регулируемого параметра. ПИД-регулятор формирует управляющий сигнал для преобразователя частоты, который за счет изменения скорости вращения электродвигателя поддерживает управляемую величину, равную заданной (рис. 1). В качестве внешнего параметра может использоваться расход жидкости, давление, температура и др. Информация с датчика поступает с внешнего аналогового входа. Значение уставки может задаваться с пульта управления, с внешнего аналогового входа или комбинацией сигналов дискретных входов.
Режим управления преобразователем частоты
Внешнее управление — режим управления преобразователем от внешнего управляющего устройства. Как правило, для этого используется интерфейс RS232 или RS485. В качестве внешнего устройства управления может использоваться персональный компьютер со специальным программным обеспечением, позволяющий не только управлять преобразователем, но и просматривать информацию о его текущем состоянии. Часто имеется возможность управления преобразователем с внешнего пульта управления, который может располагаться на достаточном удалении (ограничения, накладываемые интерфейсом передачи данных на максимальную длину линии связи обычно составляют несколько сотен метров).
В качестве цифрового датчика температуры воздуха в помещении подстанции можно использовать функционально законченный прибор для измерения температуры DS
18S
20 (диапазон измеряемых температур –55о
С¸+125о
С; точность измерения ±
0,5ºС
), содержащий в своем составе 9-разрядный АЦП и однопроводный интерфейс, позволяющий подключение к сети MicroLan
напрямую.
Вентилятор — ротор, на котором определенным образом закреплены лопатки, которые при вращении ротора, сталкиваясь с воздухом, отбрасывают его. От положения и формы лопаток зависит направление, в котором отбрасывается воздух.
В большинстве случаев для измерения температуры в трансформаторном масле применяются термопары.
Поэтому я выбрал микросхему фирмы MAXIM
MAX
6675. Кроме усилителя и компенсатора она включает в себя 12-разрядный АЦП и трехпроводный последовательный порт для ввода информации в микроконтроллер. Разрешающая способность – 0,250
С
, передача данных может производиться с частотой 4,3 МГц.
SIMOCODE pro - это гибкая, модульная система управления двигателями, которая объединяет в себе все функции, которые необходимы для двигательного фидера. Дополнительно потребуются только устройства коммутации и защиты от коротких замыканий в главной цепи (контакторы, автоматические выключатели, предохранители). SIMOCODE pro заменяет большую часть элементов контура управления и при этом автоматически реализует все необходимые блокировки. Он предоставляет большой объем
рабочих, сервисных и диагностических данных и тем самым делает двигательный фидер более прозрачным. Он полностью интегрирует двигательный фидер через PROFIBUS DP в общую систему автоматизации.
SIMOCODE pro регистрирует и контролирует токи всех трех фаз. Благодаря обработке суммы токов трех фаз создается возможность контроля возникновением тока утечки или замыкания на землю.
Автономный режим
SIMOCODE pro C и pro V защищают и управляют двигательным фидером независимо от системы автоматизации. Даже при отказе автоматики (ПЛК) или при нарушении связи двигательный фидер остается полностью защищенным и управляемым. SIMOCODE pro может использоваться без шины PROFIBUS DP, которую при необходимости, естественно, нетрудно подключить.
Типовые конфигурации
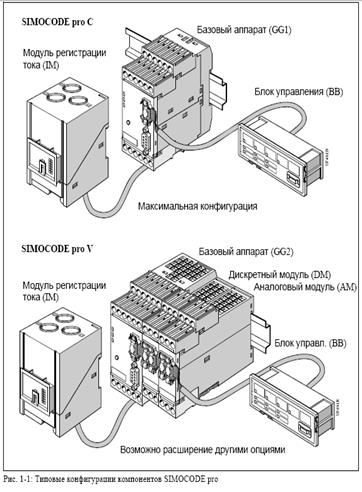
Приводимая схема иллюстрирует типовые конфигурации компонентов SIMOCODE pro C и SIMOCODE pro V:
Расчетная часть
Оценка погрешности каналов измерения напряжения и тока.
По заданию погрешность измерения по этим каналам e=1%. Погрешность выбранных датчиков тока и напряжения (трансформаторов тока и напряжения по классу точности 0,5)
eД
£0,5% При этом eД
³eК
³eАЦП
.
Если выбран быстродействующий АЦП, то устройство выборки-хранения можно не использовать. Поэтому принимаем
eУВХ
=0%. Зададимся eК
=0,2% и eАЦП
=0,4%.
При этом суммарная среднеквадратическая погрешность оценивается выражением
eS
=(e2
Д
+e2
К
+e2
АЦП
)1/2
=(0,52
+0,22
+0,42
)1/2
=0,67%.
В суммарной погрешности не учитывается погрешность преобразования аналоговым каналом: составными частями универсального измерительного преобразователя. Если выбрать погрешность УИП
eУИП
£(e-eS
)=1-0,67=0,33%,
то измерительный канал будет соответствовать требованию "Задания" по точности измерения.
Необходимая разрядность АЦП определится выражением
m
³int
[log
2
(1/ 0,004)]
или m
³8.
При этом погрешности
eАЦП
£0,39%, eS
=0,665%.
Оценка погрешности каналов измерения температуры.
Цифровой датчик для измерения температуры воздуха DS
18S
20 (со встроенным АЦП и однопроводным интерфейсом), время преобразования которого составляет 750 мс, обеспечивает точность измерения ±0,5ºС
при представлении сигнала в цифровом коде. Т.е. уже на выходе встроенного АЦП. По заданию требуется точность измерения температуры 1ºС
.
Применяемая термопара для измерения температуры масла обеспечивает точность измерения 1ºС
во всем диапазоне температур. Для повышения помехоустойчивости и компенсации температуры холодного спая применен специальный интерфейс для термопар MAX
6675, обеспечивающий разрешающую способность 0,250
С
при совместном использовании с применяемой Т
-термопарой. Выходной сигнал – последовательный цифровой код, передача данных может производиться с частотой 4,3 МГц. По заданию требуется точность измерения температуры 1ºС
. Т.о. видно, что на выходе 12-разрядного АЦП микросхемы точность в 4 раза выше.
Оценка погрешности измерения частоты
Государственным стандартом установлены нормы на стабильность частоты напряжения в промышленной сети по каждой фазе 50±1 Гц. Для того чтобы корректно получать оценки частоты измерительным прибором, необходимо обеспечить погрешность ниже, чем порог нестабильности частоты. Максимальная относительная нестабильность частоты составляет
1/50=0,002=0,2%.
Один из способов измерения частоты – это применения метода дискретного счета. При косвенном методе измерения частоты погрешность измерения определяется выражением
ef
=1/m
,
где m – число счетных импульсов, попавших в интервал наблюдения. В этом случае счетные импульсы формируются в измерительном устройстве, а измеряемый временной интервал (интервал наблюдения) равен периоду синусоидального измеряемого сигнала. Частота обратно пропорциональна периоду
f
сети
=1/T
сети
.
В микропроцессорной системе метод дискретного счета реализуем двумя способами. Первый заключается в реализации классического алгоритма дискретной цифровой и аналоговой техники. При этом необходимо использовать набор функциональных блоков (например, блок определения одинакового знака производной сигнала, блок формирования временных ворот, схемы совпадения), преобразующих исходный (измеряемый сигнал) в последовательность временных интервалов, а затем, используя вход таймера микроконтроллера, можно с достаточно высокой точностью вычислить значение частоты сигнала. Таким образом, данный метод предполагает наличие дополнительных узлов в схеме АСК ТП.
Другой метод измерения частоты (периода) – чисто программный способ. Если число выборок сигнала напряжения достаточно велико, то не составляет труда с требуемой точностью реализовать тот же метод дискретного счета программным способом. Погрешность в данном случае будет определяться частотой дискретизации процесса, которая является аналогом частоты следования счетных импульсов в методе дискретного счета. При использовании данного метода измерения частоты появляется возможность получения оценки дополнительных характеристик процесса – коэффициент нелинейный искажений, контроль сдвига фаз по каналам, текущее определение мгновенных значений напряжения.
Оценим соотношение возможной величины погрешности измерения частоты и частоты дискретизации. Например, при m
=10 погрешность составит ef
=0,1=10%, при m
=100 - ef
=1%, при m
=1000 - ef
=0,1%.
Реализация программного метода измерения частоты прямо зависит от технических характеристик измерительной системы, временных соотношений работы всех составляющих системы. Точность вычисления может быть существенно повышена за счет применения методов математической обработки полученных данных (например, метода интерполяции).
Список литературы
1. Справочник инженера по АСУТП. Проектирование и разработка. Ю. Н. Федоров. Инфра-Инженерия, 2008 г.
2. Современные датчики. Фрайден Дж. Техносфера, 2006 г.
3. Инжиниринг электроприводов и систем автоматизации. Новиков В.А., Чернигов Л.М. Академия, 2006 г.
4. Электронные элементы устройств автоматического управления. Схемы, расчет, справочные данные. Академкнига, 2006 г.
5. SIMOCODE pro. РУКОВОДСТВО ПО ПРОЕКТИРОВАНИЮ, ВВОДУ В ЭКСПЛУАТАЦИЮ, РЕМОНТУ И ОБСЛУЖИВАНИЮ. Издание 10/2005.
|
