СЕВАСТОПОЛЬСКИЙ НАЦИОНАЛЬНЫЙ УНИВЕРСИТЕТ
ЯДЕРНОЙ ЭНЕРГИИ и ПРОМЫШЛЕННОСТИ
Кафедра «Электротехнических систем электропотребления»
РАСЧЕТНО-ГРАФИЧЕСКАЯ РАБОТА № 2
по дисциплине
Электрические аппараты
Тема
Динамика работы и расчет времени срабатывания электромагнита постоянного тока с пользованием математического пакета MathCadв среде Windows
Выполнил:
студент ЭСЭ23В
класса
Левицкий П.В.
Севастополь 2008
ПЛАН
1. Вступление. Теоретические положения расчета динамики электромагнитов постоянного тока
2. Расчет времени трогания электромагнита постоянного тока
2.1 Схемы включения электромагнита постоянного тока
2.2 Уравнение динамики и время трогания электромагнита постоянного тока при прямом включении катушки электромагнита под напряжение
2.3 Уравнение динамики и время трогания электромагнита постоянного тока при включении по схеме ускоренного процесса срабатывания
2.3.1 Определение изменения тока и напряжения во времени численным методом
2.3.2 Решение дифференциальных уравнений с помощью преобразований Лапласа
2.3.3 Решение с использованием передаточной функции.
2.4 Уравнение динамики и время трогания электромагнита постоянного тока при включении по схеме замедления процесса срабатывания
2.4.1 Определение изменения тока и напряжения во времени численным методом
2.4.2 Определение изменения тока и напряжения во времени операторным методом
2.4.3 Аналитический метод определения времени трогания якоря электромагнита по графику
2.4.4 Решение с использованием передаточной функции
3.Заключение
1. Вступление. Теоретические положения расчета динамики электромагнитов постоянного тока
В таблице 1 даны конструктивные параметры электромагнита и элементов схем ускорения и замедления срабатывания электромагнита.
Таблица 1.
| № п/п |
U, В |
R, Ом |
Rд
, Ом |
L, Гн |
iтр
, А |
| Вариант10 |
220 |
950 |
950 |
75 |
0,095 |
Динамика срабатывания электромагнита постоянного тока.
Процесс срабатывания электромагнитов имеет динамических характер. Чтобы охарактеризовать динамический режим работы электромагнита, необходимо иметь зависимость изменения тока в обмотке и пути, пройденного якорем от времени.
Время срабатывания электромагнита – это время с момента подачи напряжения на катушку электромагнита до момента остановки якоря.
 . .
где tтр - время трогания и tдв- время движения.
В обычных конструкциях электромагнитов время срабатывания
Реклама

 мсек мсек
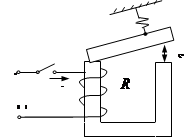
Рис.1.1. Электромагнит постоянного тока с обмоткой напряжения
После включения цепи, напряжение источника уравновешивается активным падением напряжения и противо-э.д.с. обмотки. При начальном неподвижном положении якоря, рабочий зазор δ относительно велик, поэтому магнитную цепь можно считать ненасыщенной, а индуктивность обмотки
 ; ;  . .
Решение этого уравнения имеет вид: ,где ,где  установившиеся значение тока, установившиеся значение тока,  - постоянная времени цепи. - постоянная времени цепи.
Ток обмотки, при котором начинается движение якоря, называется током трогания  ( т. а рис.2.), а время нарастания тока от нуля до - временем трогания ( т. а рис.2.), а время нарастания тока от нуля до - временем трогания  .Уравнение тока для момента трогания можно записать в виде: .Уравнение тока для момента трогания можно записать в виде: . Решив это уравнение относительно времени трогания, получим . Решив это уравнение относительно времени трогания, получим  . Таким образом, время трогания пропорционально постоянной времени Т. Изменение тока до момента трогания происходит по экспоненте с постоянной времени Т. При движении якоря . Таким образом, время трогания пропорционально постоянной времени Т. Изменение тока до момента трогания происходит по экспоненте с постоянной времени Т. При движении якоря  , поэтому , поэтому  начинает уменьшаться, поскольку напряжение источника питания U постоянно. (а-b)- изменение тока при движении якоря. Точка b, на кривой 2, соответствует полному срабатыванию начинает уменьшаться, поскольку напряжение источника питания U постоянно. (а-b)- изменение тока при движении якоря. Точка b, на кривой 2, соответствует полному срабатыванию  . Спад тока прекращается. После остановки якоря ток будет меняться по закону . Спад тока прекращается. После остановки якоря ток будет меняться по закону  , где , где  - постоянная времени при - постоянная времени при  .Так как .Так как  соответствует замкнутому состоянию магнитопровода, а Т – разомкнутому, то соответствует замкнутому состоянию магнитопровода, а Т – разомкнутому, то  . .
Динамика отпускания якоря электромагнита постоянного тока
При размыкании цепи обмотки электромагнита магнитный поток уменьшается, и в момент, когда сила тяги электромагнита становится меньше усилия пружины, происходит отпускание якоря. Время отпускания tотп
состоит из времени спада потока tсп
от установившегося Фу
до потока отпускания Фотп
и времени движения tдв
. tотп
= tсп
+ tдв
; Движение происходит за счет усилия противодействующей пружины. Принимая усилие противодействующей пружины постоянным Рпр.ср
= (Рк
+ Рн
) / 2 , где, Рк
и Рн
- усилия пружины при  и и  , то движение якоря описывается уравнением , то движение якоря описывается уравнением  , где, а – ускорение; а = Рпр.ср
/ m. Тогда время движения якоря , где, а – ускорение; а = Рпр.ср
/ m. Тогда время движения якоря  . .
На рис.1.2. представлен график полного цикла включения и отключения электромагнита постоянного тока.
Рис.1.2. График полного цикла включения и отключения электромагнита
2. Расчет времени трогания электромагнита постоянного тока
2.1 Схемы включения электромагнита постоянного тока
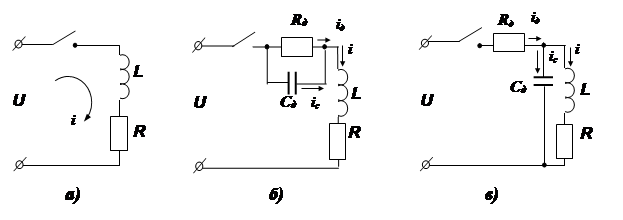
На рис.2.1. показаны схемы включения электромагнита постоянного тока: а) прямое включение катушки электромагнита под напряжение; б) включение электромагнита по схеме ускоренного срабатывания; в) включение электромагнита по схеме замедленного срабатывания.
Реклама

Рис.2.1. Схемы включения электромагнита постоянного тока.
2.2 Уравнение динамики и время трогания электромагнита постоянного тока при прямом включении катушки электромагнита под напряжение (схема рис.2.1, а)
Чтобы охарактеризовать динамический режим работы электромагнита найдём зависимость изменения тока в обмотке от времени.
Математические описания схемы для интервала времени от начала подачи напряжения на катушку электромагнита до момента начала движения якоря электромагнита выглядит так:
 ; ;  ; ;  ; ;
где:  - постоянная времени катушки электромагнита; - постоянная времени катушки электромагнита;
L=75 Гн, R= 950 Ом Т=0,07895
 - установившееся значения тока. - установившееся значения тока.
U=220В, R= 950 Ом Iу=0,23158 А
2.2.1 Определение изменения тока во времени
 ; ;
 ; ;
 ; ;  ; ;  ; ;  ; ;
 ; ;
 ; ;


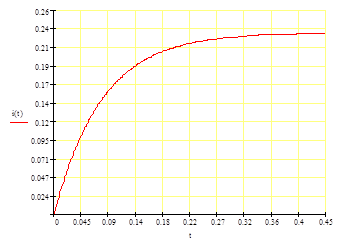
Рис.2.2 График изменения тока в катушке электромагнита, включенной непосредственно на напряжение питания
Определение времени трогания якоря электромагнита:
 ; ; 


Т.е якорь начинает двигаться через 0,042с с момента подачи U.
Определение тока трогания:



Это же подтверждается и графиком (рис.2.3.) построенным по уравнению  с использованием Mathcad с использованием Mathcad
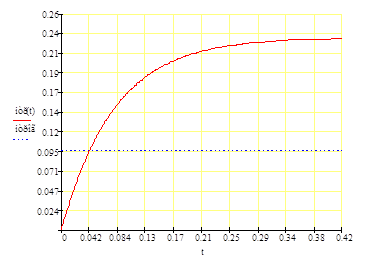
Рис.2.3. График изменения тока в катушке электромагнита, включенной непосредственно на напряжение питания и ток трогания.
2.3 Уравнение динамики и время трогания электромагнита постоянного тока при включении по схеме ускоренного процесса срабатывания (схема рис.2.1,б):
Чем меньше активное сопротивление цепи, тем быстрее срабатывает электромагнит. Для уменьшения сопротивления R при неизменной индуктивности Lи неизменных размерах электромагнита применяется добавочный резистор Rдоб, который шунтирован размыкающим контактом или конденсатором Сдоб.
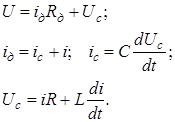
Уравнения, описывающие схему :

Запишем уравнение данной схемы относительно тока в операторной форме:


Для обеспечения апериодического переходного процесса необходимо, чтобы корни знаменателя были вещественными. Это возможно, когда: . Это уравнение решается в MACHCAD относительно С. При . Это уравнение решается в MACHCAD относительно С. При  ( мкф ) апериодический процесс изменения тока в катушке будет оптимальным. ( мкф ) апериодический процесс изменения тока в катушке будет оптимальным.

Так для численных данных параметров схемы Сопт
будет иметь численное значение в фарадах:



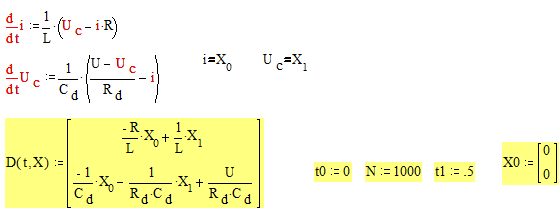
2.3.1 Определение изменения тока и напряжения во времени численным методом
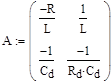
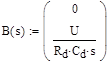
Численный метод состоит в составлении системы дифференциальных уравнений, описывающей работу электромагнита. Далее эта система решается с помощью MACHCAD, с использованием матрицы системы. Матрица системы составляется из коэффициентов дифференциальных уравнений. Отдельно составляется матрица начальных условий.
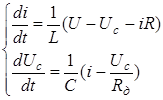
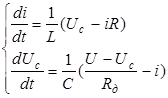
Уравнение

можно записать и в виде уравнений в нормальной форме Коши:
СПРАВКА: В Mathcad 11 имеются три встроенные функции, которые позволяют решать задачу Коши различными численными методами.
· rkfixed(y0, t0, t1, N, D) — метод Рунге-Кутты с фиксированным шагом,
· Rkadapt(y0, t0, t1, N, D) — метод Рунге-Кутты с переменным шагом;
· Buistoer(y0, t0, t1, N, D) — метод Булирша-Штера;
o у0 — вектор начальных значений в точке to размера NXI;
o t0 — начальная точка расчета, t1 — конечная точка расчета,
o N — число шагов, на которых метод находит решение;
o D — векторная функция размера NXI двух аргументов — скалярного t и векторного у. При этом у — искомая векторная функция аргумента t того же размера NXI.
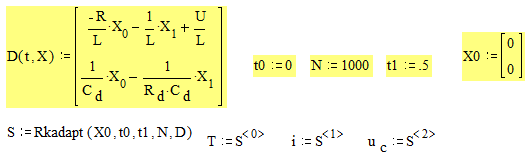
Воспользуемся функцией Rkadapt(y0, t0, t1, N, D) -получим матрицу решения системы обыкновенных дифференциальных уравнений численным методом Рунге-Кута на интервале от t0 до t1 (зададим от 0 до 5 сек) при N фиксированных шагах решения (пусть N=1000), вектор заданных начальных условий X0 (нулевые условия). Сформируем матрицу системы дифференциальных уравнений 2-го порядка.
Применим функцию: Rkadapt


-Интервал времени- нулевой столбец матрицы решений S.
-Значение искомой величины тока- первый столбец матрицы решений S.
 напряжение на конденсаторе - второй столбец матрицы S напряжение на конденсаторе - второй столбец матрицы S
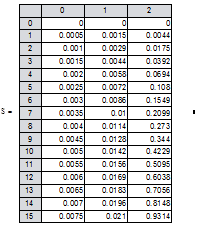
И так далее 1000 значений (N=1000)
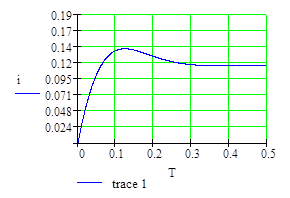
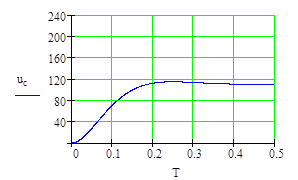
Рис. 2.4. Графики зависимости тока в катушке электромагнита и напряжения на конденсаторе от времени при ускоренном срабатывании электромагнита (численное решение)
2.3.2 Решение дифференциальных уравнений с помощью преобразований Лапласа
Преобразование Лапласа позволяет решать дифференциальные уравнения высоких порядков в более лёгкой форме. При переходе в комплексную область дифференцирование заменяется степенью. Для обратного перехода используется функция Invlaplace.

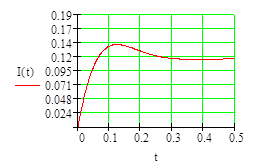
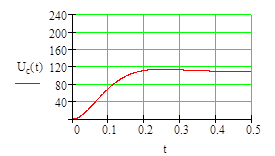
Рис.2.5. Графики зависимости тока в катушке и напряжения на конденсаторе от времени при ускоренном срабатывании электромагнита ( с помощью преобразования Лапласа)
2.3.3 Решение с использованием передаточной функции.

Используя обратное преобразования Лапласа к уравнению для тока определим зависимость тока в катушке электромагнита от времени. Будем полагать, что напряжение, приложенное к катушке электромагнита, является ступенчатой функцией времени. Используя ЭВМ, получим:
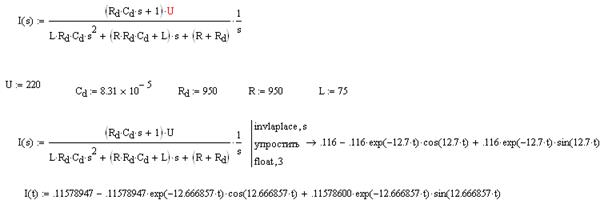
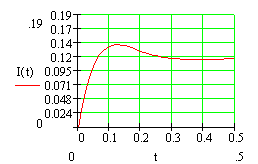
Рис.2.6. График зависимости тока от времени при ускоренном срабатывании электромагнита (решение с помощью передаточной функции)
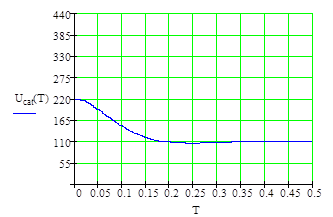
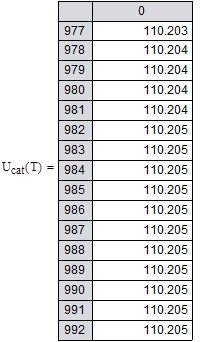
Рис.2.7. График изменения напряжения на катушке электромагнита, полученный в результате решения с использованием преобразования Лапласа.
Решение наглядно показывает, что установившееся значение напряжения =110,205 В
Рис. 2.7. Значение установившегося напряжения на катушке электромагнита.
2.4 Уравнение динамики и время трогания электромагнита постоянного тока при включении по схеме замедления процесса срабатывания (рис. 2.1,в)
2.4.1 Определение изменения тока и напряжения во времени численным методом
Уравнения, описывающие работу электросхемы:
Воспользуемся функцией Rkadapt (y0, t0, t1, N, D) -получим матрицу решения системы обыкновенных дифференциальных уравнений численным методом Рунге-Кута на интервале от t0 до t1 (зададим от 0 до 5 сек) при N фиксированных шагах решения (пусть N=1000), вектор заданных начальных условий X0 (нулевые условия). Сформируем матрицу системы дифференциальных уравнений, соответствующую заданному дифференциальному уравнению 2-го порядка.
Т-нулевой столбец, i- первый столбец, Uс- второй столбец.
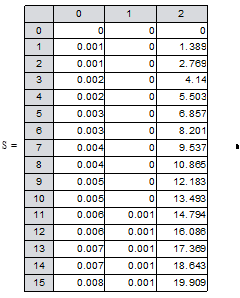
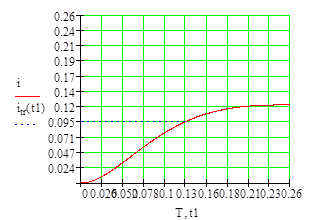
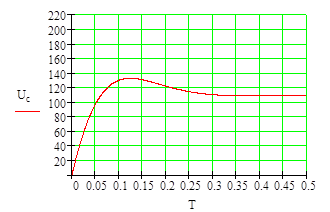
Рис.2.8. Графики зависимости тока в катушке электромагнита и напряжения на конденсаторе от времени при замедленном срабатывании электромагнита (численный метод решения дифференциальных уравнений)
2.4.1 Определение изменения тока и напряжения во времени операторным методом
Составляем оператор. В расчётах применяется функция Mathcadidentity (2) - создаёт единичную матрицу ( по диагонали стоят единицы) размером 2*2 и операция обратная матрица (-1).Для ввода оператора поиска обратной матрицы нажмём кнопку Inverse (Обратная матрица) на панели инструментов Matrix (Матрица).Применяем функцию invlaplace для обратного перехода из комплексной области.




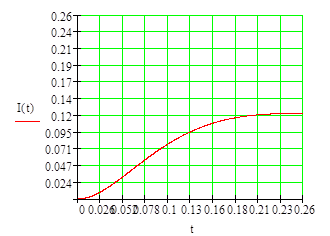
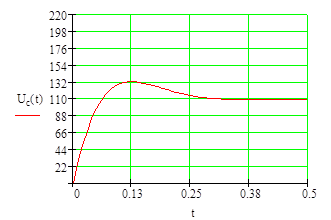
Рис.2.9. Графики зависимости тока в катушке электромагнита и напряжения на конденсаторе от времени при замедленном срабатывании электромагнита (операторный метод решения дифференциальных уравнений)
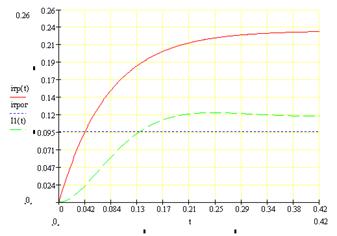
Рис. 2.10.Сравнительный анализ времени трогания по схеме прямого включения и схемы с запаздыванием.
Как видно из графиков кривая зависимости тока от времени при схеме включения с запаздыванием лежит ниже. Время трогания увеличивается с 0,042с до 0,13 сек.

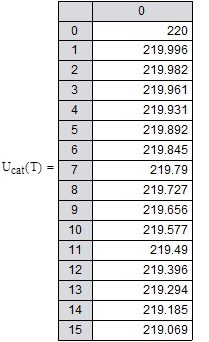
Рис.2.11. Установившееся значение напряжения на конденсаторе.
Из рис.2.11. видно, что напряжение на конденсаторе принимает установившееся значение Uс
=110 В.
2.4.3. Аналитический метод определения времени трогания якоря электромагнита по графику







2.4.4 Решение с использованием передаточной функции
Передаточная функция для схемы с замедлением имеет вид:
 , следовательно , следовательно
Уравнения, описывающие работу схемы:
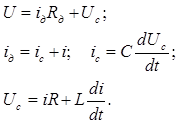





Переходим из комплексной области с помощью функции invlaplace
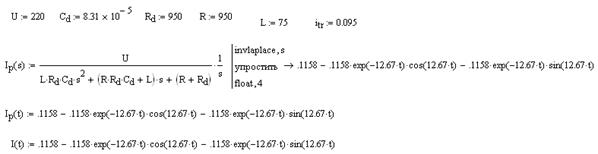
Рис.2.12. График зависимости тока от времени при замедленном срабатывании электромагнита (метод решения с помощью передаточной функции)
Заключение
Целью данной РГР является подтвердить расчетами теоретические положения расчета времени трогания электромагнитов постоянного тока, включенных по различным схемам срабатывания. Были изучены возможности математического пакета MathCadв среде Windowsдля решения дифференциальных уравнений, описывающих динамику электромагнитов постоянного тока. Для схем включения электромагнита при ускоренном или замедленном срабатывании были составлены системы дифференциальных уравнений в форме Коши, описывающих их работу. Системы решались с помощью функции MATHCAD Rkadapt(y0, t0, t1, N, D) — метод Рунге-Кутты с переменным шагом, так получено численное решение. Кроме того были использованы передаточные функции. При переходе из комплексной области во временную применяется обратное преобразование Лапласа (функция invlaplace). Для схемы замедления использовался также операторный метод. Решение в MATHCAD связано с операциями над матрицами. Вычисления наглядно демонстрируют графики. Графики, построенные при разных способах решения совпадают.
Результаты расчётов: время трогания электромагнита постоянного тока 0,042с и 0,1296с для схем прямого и замедленного подключения соответственно. Кривая зависимости тока от времени при схеме включения с запаздыванием лежит ниже. Ток трогания 0,095 А.
|