СОДЕРЖАНИЕ
ВВЕДЕНИЕ
1 ОБЩАЯ ЧАСТЬ
1.1 Тип станка (механизма), его основные технические данные
1.2 Кинематическая схема, назначение приводов
1.3 Циклограмма (последовательность операций), режимы работы главного привода
2 РАСЧЕТ СТАТИЧЕСКИХ НАГРУЗОК, ВЫБОР ЭЛЕКТРОПРИВОДА
2.1 Расчет мощности электродвигателя главного привода
2.2 Основные требования к системе электропривода
2.3 Выбор рода тока и напряжения и типа двигателя
2.4 Расчет механических характеристик выбранного двигателя, проверка двигателя
2.5 Анализ электропривода и системы управления им (достоинства и недостатки)
3 РАСЧЕТ И ВЫБОР ПРОВОДОВ И АППАРАТУРЫ
3.1 Выбор проводов и питающих кабелей
3.2 Выбор защитной аппаратуры и аппаратуры управления
4 СПЕЦИАЛЬНАЯ ЧАСТЬ
4.1 Выбор преобразователя частоты, расчет характеристик двигателя
4.2 Выбор двигателя постоянного тока и тиристорного преобразователя
4.3 Определение параметров трансформатора, тиристоров, реактора
4.4 Расчет механических характеристик двигателя постоянного тока
5 ЭЛЕКТРИЧЕСКИЕ СХЕМЫ
5.1 Описание работы схемы управления
ЗАКЛЮЧЕНИЕ
СПИСОК ЛИТЕРАТУРЫ
ВВЕДЕНИЕ
Электромашиностроение – одна из ведущих отраслей машиностроительной промышленности. Процесс изготовления электрической машины складывается из операций, в которых используется разнообразное технологическое оборудование. При этом основная часть современных электрических машин изготавливается методом поточно–массового производства. Специфика машиностроения заключается главным образом в наличии таких процессов, как изготовление и укладка обмоток электрических машин, для чего применяется нестандартизированное оборудование, изготавливаемое обычно самими электромашиностроительными заводами.
Электромашиностроение характерно многообразием технологических процессов, использующих электрическую энергию: литейное производство, сварка, обработка металлов под давлением, резка и так далее. Предприятия машиностроения широко оснащены электрифицированными подъемно – транспортными механизмами, насосными и компрессорными установками.
Первостепенное значение для автоматизации производства имеют многодвигательный электропривод и средство электрического управления. Развитие электропривода идет по пути упрощения механических передач и приближения электродвигателей к рабочим органам машин и механизмов, а также возрастающего применения электрического регулирования скорости приводов. Широко внедряются комплектные тиристорные преобразовательные устройства.
Реклама

Все большее распространение получают новейшие средства электрической автоматизации технологических установок, машин и механизмов на базе полупроводниковой техники, высокочувствительной контрольно – измерительной и регулирующей аппаратуры, бесконтактных датчиков и логических элементов. Для управления технологическими процессами все чаще используются электронно-вычислительные машины.
В современных условиях эксплуатации оборудования требует глубоких и разносторонних знаний, а задачи создания нового или модернизации существующего электрифицированного технологического агрегата, механизма или устройства решаются совместными усилиями технологов, механиков и электриков. Требования к электрооборудованию вытекают из технологических данных и условий. Электрооборудование нельзя рассматривать в отрыве от конструктивных и технологических особенностей электрифицированного объекта, и наоборот. Поэтому специалисты в области электрооборудования промышленных предприятий должны быть хорошо знакомы как с электрической частью, так и с основами технологических процессов и конструкциями установок электронагрева и электросварки, металлообрабатывающих станков и машин.
1 ОБЩАЯ ЧАСТЬ
1.1 Назначение и устройство механизма
Агрегат предназначен для вырезки дефектных участков, обрезки концов, контроля толщины и стыковой сварки отдельных полос.
Размеры обрабатываемых рулонов:
- вес рулона от3,5 до30 тонн;
- внутренний диаметр 600 мм;
- наружный диаметр от1050 до 2300 мм;
- толщина обрабатываемых полос от 0,3 до 1,00мм;
Агрегат состоит из следующих основных узлов:
- разматывателя;
- гильотинных ножниц;
- стыкосварочной машины;
- моталки.
Передний и задний концы полосы обрезают до толщины не более 0,8 мм.( Для толщин 0,50 – 0,65мм ). Толщина полосы должна отвечать требованиям по отклонениям по толщине после прокатки, кроме переднего и заднего концов длиной до 10 метров. Утолщенные дефектные участки вырезают и полосу сваривают встык.
Рулон может состоять из полос, сваренных встык. Рулоны в обработку поступают со склада 04.
Технология обработки рулона:
- 1 входной рулон – 1 выходной рулон;
- до 5 входных рулонов – 1 выходной;
Реклама

- 1 входной рулон – несколько выходных рулонов ( входной рулон считается не закончившимся, пока весь не сойдет с агрегата, выходной рулон меньше 1,5 тонн считается подмоткой и в производстве не учитывается);
- возможно снятие с разматывателя части рулона.
После обработки поступают на склад 05.
Приводы моталок служат для создания и поддержания постоянного натяжения и для намотки прокатываемой полосы.
Моталка состоит из электродвигателя, тормоза, муфты, редуктора и барабана
Таблица 1 – Основные технические данные механизма моталки
| Наименование |
Обозначение |
Единицы измерения |
Величина |
| Вес рулона |
Gр
|
Н |
245250 |
| Вес барабана моталки |
Gб
|
Н |
11507,1 |
| Предел текучести материала полосы |
ds
|
H/ |
1060 |
| Диаметр барабана |
Dб
|
м |
0,6 |
| Диаметр рулона |
Dр
|
м |
2,3 |
| Диаметр цапфы |
dц
|
м |
0,24 |
| Скорость намотки полосы |
u |
м/с |
5 |
| Толщина полосы |
h |
мм |
0,35 |
| Ширина полосы |
b |
м |
1250 |
| КПД редуктора |
hред
|
––– |
0,9 |
| Модуль упругости |
E |
Н× |
 200000 200000 |
| Маховый момент рулона |
 |
Н× |
692831,3 |
| Маховый момент барабана |
 |
Н× |
2071,3 |
| Натяжение полосы |
Т |
Н |
18750 |
| Передаточное число редуктора |
i |
––– |
16 |
1.2 Кинематическая схема
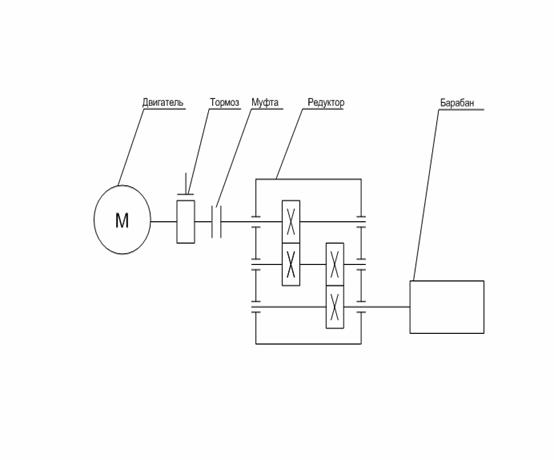
Рисунок 1. Кинематическая схема. Привод моталки Агрегата подготовки холоднокатаных рулонов
1.3 Циклограмма (последовательность операций), режимы работы главного привода:
1 Заправка конца рулона;
2 Разжатие барабана на диаметр 600мм;
3 Натяжение полосы , за счет медленного вращения барабана;
4 Разгон рулона до скорости 5 м/с;
5 Наматывание рулона до диаметра 2300мм;
6 Торможение барабана за счет механического тормоза;
7 Разжатие конца рулона;
8 Снятие рулона с барабана.
Далее данный цикл повторяется. Так как время работы больше10 минут, привод работает в продолжительном режиме работы.
2 РАСЧЕТ СТАТИЧЕСКИХ НАГРУЗОК, ВЫБОР ЭЛЕКТРОПРИВОДА
2.1 Расчет мощности электродвигателя главного привода
Определяется момент, необходимый для создания натяжения полосы:
 (2.1) (2.1)
где Rб–радиус барабана моталки, м;
T–максимальное натяжение полосы, Н.
Согласно формуле (2.1):

Определяется момент, необходимый для пластического изгиба полосы:
 (2.2) (2.2)
где dт
– предел текучести материала полосы, МПа;
h - толщина полосы, мм;
b – ширина полосы, мм.
Согласно формуле (2.2):

Определяется суммарное усилие от веса барабана и веса рулона, Н,
 (2.3) (2.3)
где Gр
- вес рулона, Н;
Gб
- вес барабана, Н.
Согласно формуле (2.3):

Определяется момент трения в подшипнике вала барабана моталки:
 (2.4) (2.4)
где åP – суммарное усиление от веса барабана и веса рулона, кН
dц – диаметр цапфы вала барабана, м;
m - коэффициент трения в подшипниках, m = 0,05.
Согласно формуле (2.4):
 
Определяется расчетная мощность двигателя моталки:
 (2.5) (2.5)
где u - максимальная окружная скорость моталки, м/с,
R – радиус барабана, м;
h - КПД редуктора.
Согласно формуле (2.5):

2.2 Основные требования предъявляемые к системе электропривода
Выбор системы электропривода определяется нагрузкой двигателя, статическими свойствами электропривода, диапазоном и плавностью регулирования скорости или необходимости её стабильности, динамическими свойствами, точностью поддержания заданного режима.
Всем этим требованиям, представлены технологией, удовлетворяют двигатель постоянного тока с системой электропривода ТП-Д.
Система ТП-Д имеет более хорошие параметры по сравнению с системой Г-Д, где низкий КПД системы, наличие вращающихся частей, большие эксплуатационные затраты, значительная стоимость системы.
Система электропривода ТП-Д обладает следующими характеристиками:
1 Плавное регулирование скорости, а также возможность её изменения в широком диапазоне;
2 Жёсткость механической характеристики на каждой ступени регулирования;
3 Минимальные потери при пуске и работе на пониженной скорости в связи с управлением в цепях возбуждения небольшими токами и отсутствием сопротивления в главной цепи;
4 Для тиристоров характерен очень высокий коэффициент усиления мощности, высокий КПД, постоянная готовность к работе, малый вес и габарит;
5 Лёгкость и точность автоматического регулирования напряжения на шинах и скорости двигателя, благодаря применению маломощных регуляторов повышенной чувствительности, в работающих цепях возбуждения возбудителей;
6 Простота и непрерывность управления по сравнению со ступенчатым реостатным управлением;
7 Минимальное время управления;
8 Возможность получения любых характеристик;
9 Малая мощность управления.
2.3 Выбор рода тока и напряжения и типа двигателя
Для питания двигателей постоянного тока используется преобразователь, вырабатывающий постоянный ток напряжением 420 В.
Для питания аппаратуры управления, освещения, сигнализации используется переменный ток напряжением 36 В.
На оснований пунктов 2.1, 2.2, выбираем двигатель постоянного тока:SHC-4502L
Таблица 2 – Основные технические данные двигателя постоянного тока типа SHC-4502L
| Характеристика |
Обознач. |
Единицы измерения |
Величина |
| Номинальная мощность |
Pн
|
кВт |
288 |
| Номинальное напряжение |
Uн
|
В |
420 |
| Номинальный ток |
Iн |
А |
750 |
| Номинальная/максимальная частота вращения двигателя |
nн
|
об/мин |
510/1643 |
| Перегрузочная способность по току |
l |
––– |
2,5 |
| Маховый момент двигателя |
 |
 |
200 |
| ПВ двигателя |
ПВ |
% |
100 |
| КПД |
з |
––– |
0,91 |
2.4 Расчет механической характеристики выбранного двигателя, проверка двигателя
Двигатель постоянного тока SHC-4502L.
Находим первую точку механической характеристики:
т.к. М0
= 0, Н·м
где М0
– момент холостого хода, Н·м;
Определяем скорость холостого хода:
 (2.6) (2.6)
где Uн
– номинальное напряжение питания, В;
кФ – магнитный поток;
Определяем магнитный поток:
 (2.7) (2.7)
где Iн
– номинальный ток, А;
Rдв
– сопротивление цепи якоря, Ом;
щн
– номинальная скорость, рад/с;
Определяем сопротивление цепи якоря:
 (2.8) (2.8)
где зн
– номинальный КПД;
Согласно формуле (2.8):

Определяем номинальную скорость:
 (2.9) (2.9)
где р= 3,14
nн
– номинальная скорость, об/мин;
Согласно формуле (2.9):
Согласно формуле(2.7):
Согласно формуле (2.6):
Определяем номинальный момент:
 (2.10) (2.10)
где Pн
– номинальная мощность двигателя, Вт;
Согласно формуле(2.10):
Для проверки выбранного двигателя определяем величину статического момента:
 (2.11) (2.11)
где Pz
=Pрасч.
=146,40 , кВт;
Согласно формуле(2.11):
Для проверки двигателя на перегрузочную способность необходимо выполнить условие:
 (2.12) (2.12)
где Мсмакс
= Мс
– максимальный статический момент, Н·м;
 (2.13) (2.13)
Согласно формуле (2.13):

Согласно формуле (2.12):

т.к. условие выполняется, то двигатель SHC-4502L, для данного механизма выбран верно.
Естественная механическая характеристика двигателя постоянного тока SHC-4502Lпредставлена на чертежах КП.
2.5 Анализ электропривода и системы управления им (достоинства и недостатки)
Электроприводом называют электромеханическую систему, состоящую из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенную для приведения в движение исполнительных органов рабочей машины и управления этим движением.
По роду тока применяются электроприводы постоянного и переменного тока. На данном механизме применяется электропривод постоянного тока.
Электроприводы с двигателями постоянного тока, несмотря на их более высокую стоимость и сложность в эксплуатации, получили широкое распространение благодаря в первую очередь простым и надежным способом регулирования частоты вращения, большими пусковыми моментами и перегрузочной способностью.
3 РАСЧЕТ И ВЫБОР ПРОВОДОВ И АППАРУТЫРЫ
3.1 Выбор проводов и питающих кабелей
Сечение проводов и кабелей для напряжения до 1000 В по условию нагрева определяется по справочнику в зависимости от расчетного значения длительно допустимой токовой нагрузки:
 (3.1) (3.1)
где Iдл
– ток расчетной длительной нагрузки, А;
Iн
= Iн.пасп.
= 750 – номинальный ток, А.
Согласно условию (3.1) мы выбираем кабель:

Выбираем кабель: 3АВВГ 3(1·185) Iн
=3·270,0, А
3.2 Выбор защитной аппаратуры и аппаратуры управления
В качестве защитной аппаратуры применяется автоматический воздушный выключатель, реле максимального тока – для защиты от короткого замыкания, тепловое реле – для защиты от перегрузки. В качестве аппаратуры управления применяется магнитный пускатель. Номинальный ток комбинированного расцепителя автоматического выключателя, А:
 (3.2) (3.2)
Согласно формуле (3.2):

Ток срабатывания комбинированного расцепителя автоматического выключателя, А:
 (3.3) (3.3)
где Iп – пусковой ток двигателя, А

Согласно формуле (3.3):

По справочнику [3] выбирается автоматический выключатель с параметрами:
ВА 53-41-25 IН.А.
=1000, А; IН.Р.
=1000,А;
IОТС.
=3·IН.Р.
=3·1000=3000,А.
В качестве аппаратуры управления применяется магнитный пускатель.
Номинальный ток пускателя:
 (3.5) (3.5)
Согласно уравнению (3.5): 1000,0>750,0,А – выбирается тип контактора КТ6061/3.
4 СПЕЦИАЛЬНАЯ ЧАСТЬ
Целью специальной части является модернизация электрооборудования главного привода. В данном механизме мы используем следующую модернизацию: замену двигателя постоянного тока на асинхронный двигатель и установку преобразователя частоты для его питания.
4.1 Выбор преобразователя частоты, расчет характеристик двигателя
Выбираем асинхронный двигатель взамен двигателя постоянного тока по условию:
 (4.1.1)
(4.1.1)
Согласно формуле (4.1.1):
т.о. выбираем двигатель 4А355М4У3
Таблица 3 – Основные технические данные асинхронного двигателя типа 4А355М4У3.
| Характеристика |
Обознач. |
Единицы измерения |
Величина |
| Номинальная мощность |
Pн
|
кВт |
315 |
| Номинальное скольжение |
Sн
|
% |
1,7 |
| КПД |
з |
––– |
0,94 |
| Коэффициент мощности |
cos ц |
––– |
0,92 |
| Кратность максимального момента (Мmax
/Мном
) |
К1
|
––– |
1,90 |
| Кратность пускового момента (Мп
/Мн
) |
К2
|
––– |
1,0 |
| Кратность минимального момента (Мmin
/Мн
) |
К3
|
––– |
0,90 |
| Кратность пускового тока (Iп
/Iн
) |
К4
|
––– |
7,0 |
Наиболее перспективным способом регулирования скорости асинхронного двигателя является регулирование изменением частоты подводимого напряжения с помощью преобразователя частоты, который состоит из выпрямителя, преобразующего переменное напряжение в постоянное, инвертора, преобразующее постоянное напряжение в переменное блоков управления выпрямителя и инвертора.
При этом изменяется скорость холостого хода, т. к. щ0
= 2·р·f/p (4.1.2). Для того, чтобы при изменении частоты максимальный момент двигателя оставался постоянным, необходимо также изменять напряжение, так чтобы соблюдался закон управления U/f = const (4.1.3).
Структурная схема преобразователя частоты представлена на чертежах КП.
Рассчитываем естественную механическую характеристику выбранного двигателя:
Определяем частоту вращения при идеальном холостом ходе, об/мин:
 (4.1.4) (4.1.4)
Согласно формуле (4.1.4):
Определяем номинальною частоту вращения, об/мин:
 (4.1.5) (4.1.5)
Согласно формуле (4.1.5):

Определяем номинальный и максимальный моменты двигателя, Н·м;
 (4.1.6) (4.1.6)
 (4.1.7) (4.1.7)
Согласно формуле (4.1.6), (4.1.7):

пределяем значение пускового момента, Н·м:
 (4.1.8) (4.1.8)
Согласно формуле (4.1.8):

Находим критическое скольжение:
 (4.1.9) (4.1.9)
Согласно формуле (4.1.9):

Находим критическую скорость, рад/с:
 (4.2.0) (4.2.0)
Согласно формуле (4.2.0):

Уравнение механической характеристики имеет вид:
 (4.2.1) (4.2.1)
Угловая скорость, рад/с:
 (4.2.2) (4.2.2)
где  (4.2.3) – скорость идеального холостого хода, рад/с. (4.2.3) – скорость идеального холостого хода, рад/с.
Задаваясь значением s в пределах (0ч1,20)·sкр
, согласно формулам (4.2.1), (4.2.2), (4.2.3), рассчитываем зависимости М=f(s), щ=f(s).
Таблица 3 – Параметры естественной характеристики асинхронного двигателя типа 4А355М4У3.
| s |
0,012 |
0,023 |
0,035 |
0,047 |
0,059 |
0,071 |
| M, Н·м |
1577,50 |
2624,69 |
3403,40 |
3779,90 |
3878,05 |
3812,52 |
| щ, рад/с |
155,11 |
153,40 |
151,50 |
149,62 |
157,0 |
145,85 |
Согласно уравнению (4.1.2) определяем скорость холостого хода при изменении частоты:
Таблица 4 – Величина скорости холостого хода асинхронного двигателя типа 4А355М4У3 при изменении частоты.
| f, Гц |
50,0 |
40,0 |
30,0 |
20,0 |
| щ0
, рад/с |
157,0 |
125,60 |
94,20 |
68,80 |
Характеристики асинхронного двигателя типа 4А355М4У3 при частотном регулировании представлены на чертежах КП.
4.2 Выбор двигателя постоянного тока и тиристорного преобразователя
По мощности и частоте вращения двигателя главного привода выбираем ДПТ из условия:
 (4.2.4) (4.2.4)
 (4.2.5) (4.2.5)
Тип главного привода выбирается типа SHC-4502L.
Для выбранного двигателя паспортные данные см. п. 2.3.
Для управления ДПТ средней и большой мощности чаще всего используют управляемые выпрямители, выполненные по трехфазной мостовой схеме.
Трехфазная мостовая схема нашла наибольшее применение, так как она обладает лучшими энергетическими показателями, лучшим использованием питающих трансформаторов.
Выбирается трехфазная мостовая реверсивная схема, так как происходит совместное управление в замкнутых контурах, образованными тиристорными комплектами трансформатором, при этом протекает управленческий ток, который необходимо ограничивать реакторами.
Сглаживающие реакторы включаются последовательно с якорем двигателя и выбирается из условия сглаживания.
4.3 Определение параметров трансформатора, тиристоров, реактора
Трансформатор выбирается на основе расчетных вторичных напряжений и тока, а также расчетной мощности.
Рассчитываем значение вторичного фазного напряжения трансформатора:
 (4.2.6) (4.2.6)
где КU
=0,427;
Ud
– напряжение преобразователя при угле отрывания тиристоров б=0, принимаем равным номинальному напряжению питания двигателя, В;
Кс
=1,05-1,10 – коэффициент учета колебания напряжения сети на 10%;
Кб
=1,05-1,10 – коэффициент, учитывающий неполное открывание вентилей при максимальном сигнале управления;
КR
=1,05 – коэффициент, учитывающий падение напряжения в трансформаторе и вентилях.
Согласно формуле (4.2.6):

Рассчитываем значение тока фазы вторичной обмотка трансформатора:
 (4.2.7) (4.2.7)
где Кi
=0,815;
Кф
=1,05-1,10 – коэффициент формы анодного тока;
Id
– выпрямленный ток, равный номинальному току двигателя IДН
.
Согласно формуле (4.2.7):

Находим действующее значение тока первичной обмотки трансформатора:
 (4.2.8) (4.2.8)
где
 (4.2.9) – коэффициент трансформации трансформатора. (4.2.9) – коэффициент трансформации трансформатора.
Согласно формуле (4.2.8), (4.2.9):
Находим расчетную типовую мощность трансформатора:
 (4.3.0) (4.3.0)
где Кs
=1,05
Согласно формуле (4.3.0):

По полученным данным выбирается трансформатор с номинальными параметрами:
 (4.3.1) (4.3.1)
Тиристоры выбираются по среднему значению тока через вентиль с учетом увеличения тока двигателя в переходных режимах и по максимальному значению обратного напряжения.
Рассчитываем среднее значение тока через тиристор с учетом того, что тиристор в трехфазных схемах открыт третий периода:
 (4.3.2) (4.3.2)
где Кз
=(2-2,50) – коэффициент запаса по току;
Кох
=1 – при принудительном охлаждением и
Кох
=(0,30-0,35) – при естественном воздушном охлаждении со стандартным радиатором.
Согласно формуле (4.3.2):
Рассчитываем максимальную величину обратного напряжения:
 (4.3.3) (4.3.3)
где К3
U
=(1,50-1,80) – коэффициент запаса по напряжению;
КU
обр
=1,0;
 (4.3.4) (4.3.4)
Согласно формуле (4.3.3), (4.3.4):


По каталогу выбираем тиристоры с номинальными данными:
 (4.3.5) (4.3.5)
Рассчитываем индуктивность уравнительного реактора:
 (4.3.6) (4.3.6)
где Iур
=0,10·IДН
(4.3.7) – действующее значение уравнительного тока;
f1
– частота питающей сети;
КД
= 0,62 – коэффициент действующего уравнительного тока.
Согласно формулам (4.3.6), (4.3.7):


В каждом из контуров уравнительного тока устанавливается один ненасыщенный реактор или два насыщающихся, причем индуктивность каждого из них должна быть равна полной расчетной величины.
Рассчитываем индуктивность цепи выпрямленного тока из условия сглаживания пульсации:
 (4.3.8) (4.3.8)
где k=1,0 – номер гармоники, для управляемых преобразователей;
р=6,0 – число пульсаций, для трехфазной мостовой схемы;
р1%
=10,0 – допустимое действующее значение основной гармоники тока;
Udnm
=0,178·UD
0
(4.3.9)– амплитудное значения гармонических составляющих выпрямленное напряжение, для первой гармоники и минимального рабочего угла б=300
при мостовой схеме.
Согласно формулам (4.3.8), (4.3.9):


Рассчитываем требуемую величину индуктивности сглаживающего реактора:
 (4.4.0) (4.4.0)
где  (4.4.1) – индуктивность двигателя; (4.4.1) – индуктивность двигателя;
где в=0,60 – для некомпенсированных машин;
р – число пар полюсов двигателя.
Lур
– индуктивность уравнительного реактора не учитывается так как реакторы не насыщающиеся;
где в=0,60 – для некомпенсированных машин;
р – число пар полюсов двигателя.
Согласно формулам (4.4.0),(4.4.1):


Силовая схема тиристорного преобразователя, а также структурная схема замкнутой системы с отрицательной обратной связью по скорость представлена на чертежах КП.
4.4 Расчет механических характеристик двигателя постоянного тока
Уравнение механической характеристики ДПТ имеет вид:
 ,рад/с (4.4.2) ,рад/с (4.4.2)
Рассчитываем естественную механическую характеристику:
 (4.4.3) (4.4.3)
Согласно формуле (4.4.3):

Рассчитываем разомкнутую механическую характеристику:
 (4.4.4) (4.4.4)
где Rп
=Rдв
=0,02 – сопротивление преобразователя, Ом;
Согласно формуле (4.4.4):

Рассчитываем механическую характеристику в замкнутой по скорости системе:
 (4.4.5) (4.4.5)
где Uзс.
max
=20, В– задающее напряжение;
 (4.4.6) – коэффициент передачи обратной связи по (4.4.6) – коэффициент передачи обратной связи по
скорости;
где UОС
=15, В – напряжение обратной связи;
 (4.4.7) – коэффициент передачи всей системы. (4.4.7) – коэффициент передачи всей системы.
Согласно формуле (4.4.6):
Согласно формуле (4.4.7):
Согласно формуле (4.4.5):

При изменении Uзс
меняется скорость холостого хода, жесткость характеристик не меняется.
Таблица 4 – Величина скорости холостого хода двигателя постоянного тока типа SHC-4502Lпри изменении Uзс
.
| Uзс
, В |
12,5 |
10 |
7,5 |
| щ0
, рад/с |
46,17 |
39,96 |
27,70 |
Естественная, разомкнутая и замкнутые характеристики двигателя постоянного тока типа SHC-4502L представлены на чертеже КП.
5 ЭЛЕКТРИЧЕСКИЕ СХЕМЫ
5.1 Описание работы схемы управления
Система регулирования обеспечивает следующие режимы работы двигателя: пуск, разгон, динамическое торможение противовключением и реверс.
В данном курсовом проекте используется система с двухзонным регулированием. Которая предназначена для регулирования скорости и поддержке постоянных параметров двигателя. В первой зоне происходит регулирование скорости изменением величины питающего напряжения при Ф = const, во второй зоне – регулирование скорости изменением магнитного потока при U = const, Р = const.
Схема состоит из якорной цепи и цепи возбуждения. В силовую якорную цепь входят: двигатель SHC-450-2L, тиристорный преобразователь UZ1 –КТЭУ-880/440. В цепь управления входят СИФУ AV1, регулятор тока АА1, датчик тока UA1, регулятор скорости UR, задатчик интенсивности AI, фазовыпрямительное устройство UR, сельсинный командоаппарат ручного действия СКАР.
Якорная цепь двигателя питается от трехфазной сети переменного тока напряжением 10 кВ через реверсивный тиристорный агрегат. Преобразователь состоит из: трансформатора TV1 ТСПЗ–630/10; автоматических выключателей, на стороне переменного тока QF1, QF2 –А37156, на стороне постоянного тока QF3 – А3725Б; тиристорных вентилей VS1 – VS12 – Т171-500; быстродействующих предохранителей FU1 –FU12 – ПП57-3427; разрядных цепочек с R1 – R12, С1 –С12; сглаживающего дросселя LR – ФРОС-1000/0,21УЗ.
Отрицательный сигнал обратной связи по току поступает от шунта RS1 в датчик тока UA1. На вход регулятора тока AA1 поступает разность сигналов обратной связи и задание с регулятора скорости AR.
Отрицательный сигнал обратной связи по скорости снимается с тахогенератора ВR и поступает на датчик скорости UR. На регулятор скорости поступает разность сигналов с задатчика интенсивности и датчика скорости
Задатчик интенсивности AI используется для уменьшающего сигнала задающего U. ФВУ предназначено для преобразования переменного тока с выходаСКАР в сигнал постоянного тока соответствующей полярности. СКАР предназначен для ручного задания скорости.
В силовую цепь возбуждения входят: обмотка возбуждения LM, нереверсивный тиристорный преобразователь (возбудитель) UZ2. В цепь управления входят: СИФУ – AV2, регулятор ЭДС – АЕ, блок автоматики А, регулятор тока возбуждения АА2, датчик тока возбужденияUA2.
Цепь возбуждения питается от трехфазной цепи переменного тока напряжением 10 кВ через нереверсивный тиристорный возбудитель UZ2. Который состоит из: силового трансформатора TV2; автоматических выключателей, на стороне переменного тока QF4, QF5; плавких предохранителей FU13 – FU18; тиристорных вентилей VS13 – VS18; разрядных цепочек (R-C цепочек) R13 – R18, С13 – С18.
Сигнал отрицательной обратной связи по ЭДС поступает с потенциометра RP и поступает на датчик ЭДС UE. На регулятор ЭДС AE поступает разность сигналов с блока автоматики и датчика ЭДС.
Сигнал отрицательной ОС по току возбуждения поступает с шунта RS2 в датчик тока возбуждения UA2. На регулятор тока возбуждения поступает разность сигналов с регулятора ЭДС и датчика тока возбуждения.
В данной схеме используется следующие виды защит:
1 защита вентилей от сверх токов – плавкие предохранители ПП57–3427;
2 защита от перенапряжения – разрядные цепочки из последовательно включенных ёмкостей и сопротивлений (R – C цепочки) подключаемые к каждому вентилю;
3 защита от перегрузки и внешних к.з. – быстродействующие автоматические выключатели, которые установлены в якорной цепи двигателя на входе переменного тока вентильной схемы;
4 максимально токовая защита – реле максимального тока, устанавливаемая в якорной цепи двигателя;
5 защита от перенапряжений в обмотке возбуждения – осуществляется спомощью R и VD подключенных параллельно обмотке возбуждения;
6 минимально токовая защита – реле минимального тока, установленная в цепи возбуждения
СПИСОК ЛИТЕРАТУРЫ
1. Зимин Е.Н. и др. Электрооборудование промышленных предприятий и установок. М.: Энергоиздат, 1981.
2. Коновалова Л.Л., Рожкова Л.Д. Электроснабжение промышленных предприятий и установок. М.: Энергоатомиздат, 1989.
3. Автоматические выключатель общего применения до 630А. Справочник. М.: Информзэлектро, 1996.
4. Правила устройства электроустановок. М: Энергоатомиздат, 1985.
5. Справочник технолога – машиностроения. В 2-х т. Т.2/Под ред. А.Г. Косиловой и Р.К. Мещерекова. М.: Машиностроение, 1988.
6. Справочник по электрическим машинам. В 2-х т. Т.1/Пол ред. И.П. Копылова и Б.К. Клокова. М.: Энергоатомиздат, 1988.
7. Электромагнитные пускатели. Справочник. М.: Информэлектр, 1994.
8. Электротехнический справочник. В 3-х т. Т.2Электро-технические изделия и устройства/ Под общ. Ред. Профессоров МЭИ (гл. ред. И.Н. Орлов). М.: Энергоатомиздат, 1986.
9. Данные ОАО НЛМК.
ЗАКЛЮЧЕНИЕ
В данном курсовом проекте осуществлен расчет и выбор электрооборудования главного электропривода агрегата подготовки холоднокатаных рулонов. Агрегат предназначен для вырезки дефектных участков, обрезки концов, контроля толщины и стыковой сварки отдельных полос.
Для данного станка выбраны напряжения:
220 В – переменного тока, частотой 50Гц;
420 В – постоянного тока.
Рассчитаны мощности двигателя, диапазон регулирования и предъявлены основные требования к главному электроприводу.
По данным расчета и требованиям выбран асинхронный двигателя типа 4А355М4У3.
Для выбранного двигателя рассчитана и построена естественная механическая характеристика, выбран кабель 3АВВГ3(1·185), защитная аппаратура: автоматический выключатель ВА 53-41-25 (с параметрами Iн.а.
=1000,(А);Iн.р.
=1000,(А), Iотс.
=1000,(А)); аппаратура управления: контактор КТ6061/3.
Рассчитаны и построены естественная и искусственные механические характеристики ДПТ.
Исходя из мощности и отсутствия реверса ДТП главного привода станка выбрана мостовая нереверсивная схема тиристорного преобразователя, питающий трансформатор (параметры; Sн
=382,88, кВАр;U2ф
=207,61,В;I2ф
=641,81,А), рассчитаны параметры тиристоров (Iдоп
> 625,0, А; Uобр.доп
>729,30,В), сглаживающих реакторов, дано описание схемы управления.
|
