Кафедра общей и прикладной геофизики
Курсовая работа
по геофизическим исследованиям скважин на тему:
Разработка инклинометра с непрерывным измерением азимута
Выполнил: студент группы 4151
Рыжов А. А.
Проверил: Неретин В.Д.
Дубна, 2005
Содержание
Введение. 3
1. Определение искривления скважин. 5
2. Оценка погрешностей измерения. 11
3. Феррозондовые инклинометры.. 23
4. Гироскопические инклинометры.. 28
Заключение. 36
Список литератур. 37
Приложение 1. 38
Введение
Целью курсовой работы
является изучение и сравнение инклиномет- рических датчиков: феррозонда и гироскопа.
Актуальность темы.
Непрерывный рост темпов разведки и добычи нефти и газа, увеличение интенсивности уже найденных месторождений за счёт применения кустового бурения и горизонтальной проводки месторождений потребовало существенного повышения точности диагностики и активного контроля пространственного положения ствола скважины.
Как известно, в бурение наклонных скважин одним из трудных и ответственных задач является ориентирование отклонителя для проведения зарезки с вертикального ствола. Ориентирование отклонителя связано с возможными ошибками, увеличивающимися с ростом глубины бурения.
Осуществить зарезку с вертикального ствола не представляется возможным провести на основе традиционно применяемой технике бурения. Интервалы искривления характеризуются возникновением осложнений и прихватов бурильного инструмента.
Это, в свою очередь, привело к необходимости создания новых, более совершенных поколений инклинометрических измерительных систем, с помощью которых осуществляется определения пространственного положения скважины.
Инклинометр, как измерительная система, используется в важнейшем технологическом процессе – строительстве скважин. По его показаниям маркшейдер контролирует соответствие профиля и плана скважины проектному заданию и корректирует соответствующим образом процесс бурения. Поэтому точность производимых измерений и оперативность их представления во многом определяют и стоимость затрат на построение скважины в целом.
Разработкой таких систем занимается ряд специализированных отечественных и зарубежных фирм. Однако отечественные инклинометры уступают зарубежным по техническим характеристикам, а последние имеют очень высокую стоимость.
Реклама

В то же время, анализ научно – технических достижений наших ведущих предприятий аэрокосмической и приборостроительной отраслей показывает, что на базе своих разработок и научно – технических заделов они могут создавать отечественные инклинометры, конкурентоспособные на мировом рынке, как по своим техническим характеристикам, так и по стоимости.
Однако, несмотря на большой научный задел в области точного приборостроения, использование его для решения проблем инклинометрии требует дополнительного изучения и исследования. По этому все усилия, направленные на разработку инклинометрических систем, являются актуальными и своевременными.
1. Определение искривления скважин
В проектах на бурение проводка скважин предусматривается вертикальной или в заданном направлении (наклонно-направленные). Направленное бурение проводят в тех случаях, когда кровлю пласта необходимо вскрыть в точках, проекция которых на земную поверхность смещена относительно устья скважины. Это требуется при кустовом бурении (рис.1,а) в случае, когда невозможно разместить оборудование непосредственно над объектом бурения (рис.1,б), при вскрытии крутопадающих пластов (рис.1,в) и т. п.
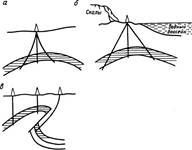
Рис.1. Примеры применения наклонно-направленного бурения
а – кустовое бурение;
б – вскрытие пласта под препятствием;
в – вскрытие крутопадающего пласта под надвигом
Однако и при бурении вертикальных скважин за счет изгиба бурильных триб и вскрытия пластов различной твердости, залегающих под некоторым углом к горизонтальной поверхности, происходит отклонение ствола от вертикали, называемое искривлением скважины.
Информацию о фактическом положении ствола скважины необходимо иметь прежде всего технологам, с тем чтобы предотвратить значительные отклонения ствола от вертикали или заданного направления. Необходимо выявлять участки с резкими искривлениями, в которых может образоваться система желобов, приводящих к осложнениям при бурении, проведении геофизических исследований, при спуско-подъемах бурового инструмента, спусках обсадных колонн, фильтров. Кроме того, данные об искривлениях необходимо учитывать при геологических построениях, при определении месторасположения забоя, абсолютных отметок вскрываемых пластов и их нормальной мощности. Пространственное положение любой точки ствола скважины характеризуется двумя углами: углом искривления δ (кривизны скважины) – отклонением оси скважины от вертикали (рис.2,а) и дирекционным углом β (рис.2,б)– углом между горизонтальной проекцией элемента оси скважины, взятой в направлении увеличения глубины скважины, и географическим меридианом.
Реклама


Рис.2 Проекция участка ствола скважины на вертикальную (а) и горизонтальную (б) плоскости.
Обычно вместо дирекционного угла пользуются магнитным азимутом φ, т. е. углом, отсчитываемым по ходу часовой стрелки между направлением на магнитный север См и горизонтальной проекцией элемента оси скважины.
Определение искривления скважины сводится к замерам положения в пространстве оси скважины, следующим один за другим. Причем в пределах каждого отрезка ось скважины отождествляют с прямой линией. Измерения в скважинах выполняют по точкам. В вертикальных скважинах расстояние между точками наблюдения l (шаг измерения) принимают равным 25м, в наклонно-направленных – 5 м.
При определении проекции ствола скважины условно принимают, что углы δ и φ, полученные в нижней точке интервала исследования, остаются постоянными до следующей точки измерения. Плоскость, проходящую через вертикаль, и прямую линию, принимаемую в данном интервале за ось скважины, называют плоскостью искривления. Истинные значения угла отклонения δ, а также величину горизонтальной проекции заданного интервала глубин определяют в плоскости искривления.
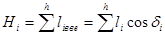
Проекцию интервалов ствола скважины на вертикальную плоскость (рис.2, а) определяют как
 (1) (1)
где  и
и  – глубина нижней и верхней точек измерения. – глубина нижней и верхней точек измерения.
Для определения абсолютной отметки вскрываемого i-го пласта  вычисляютсумму вертикальных проекций от устья скважины до изучаемого интервала: вычисляютсумму вертикальных проекций от устья скважины до изучаемого интервала:
 (2) (2)
Горизонтальная проекция i-го интервала скважины  ,
отклоненного на угол ,
отклоненного на угол  (рис. 2, б), (рис. 2, б),
 (3) (3)
По данным измеренных углов и вычисленных значений горизонтальных проекций строят инклинограмму – проекцию оси скважины на горизонтальную плоскость (рис. 3). Инклинограмму получают путем последовательного построения всех вычисленных значений , начиная с наименьшей глубины, и откладывают их в направлении измеренного угла φ. Соединив начальную точку первого интервала с конечной точкой последнего, получают общее смещение оси скважины от вертикали α на исследуемом участке. Величину смещения и его направление указывают на плане. Инклинограммы строят, как правило, в масштабе 1:200.

Рис.3 Пример построения инклинограммы – горизонтальной проекции ствола скважины
Углы и азимуты отклонения в скважинах измеряют специальными скважинными приборами – инклинометрами. В зависимости от системы измерения все инклинометры можно объединить в три группы.
Первая группа объединяет приборы, в которых для измерения азимута служит магнитная стрелка (буссоль), а датчиком угла является отвес. Показания датчиков с помощью градуированных сопротивлений (потенциометров) преобразуются в электрические сигналы и по жиле кабеля передаются на поверхность (инклинометр насопротивлениях).
Во вторую группу входят фотоинклинометры. В качестве указателя азимута служит буссоль, указателя угла – сферическое стекло с нанесенной сеткой углов наклона и шарик, свободно перемещающийся по этой сферической поверхности. Замеры проводят по точкам. Регистрация осуществляется в скважинном приборе путей фотографирования показаний датчиков на кинопленку.
Третья группа – это гироскопические инклинометры. В качестве датчика азимута используют гироскоп, который при вращении сохраняет заданное направление оси в пространстве. Датчиком угле искривления служит отвес. Измерения выполняют непрерывно по6 стволу скважины.
Приборами, в которых датчиком азимута служит буссоль, измерения азимута можно проводить только в открытом стволе скважины Гироскопические инклинометры позволяют измерять азимут в скважинах, обсаженных металлической колонной, а также в разрезах, в которых естественное магнитное поле Земли аномально искажено местными полями.
В практике геологоразведочных работ на нефть и газ наиболее широко применяются инклинометры с дистанционным электрическим измерением, в которых датчиками служат градуированные электрические сопротивления.
Основная часть инклинометра – вращающаяся рамка, кинематическая схема которой показана на рис. 4. Центр тяжести рамки смещён, в результате чего при положении скважинного прибора в пространстве плоскость рамки устанавливается перпендикулярно к плоскости искривления скважины. В рамке размещен указатель азимута и угла. Указатель азимута состоит из магнитной стрелки 1 и градуированного электрического сопротивления 2 (кругового реохорда).

Рис. 4 Схема конструкции измерительной части инклинометра на сопротивлениях
Круговой реохорд смонтирован на изоляционной панели и установлен под магнитной стрелкой. Магнитная стрелка выполнена из двух намагниченных стерженьков, которые закреплены в дюралюминиевом колпачке с агатовым подшипником. Подшипник насажен на острие оси 5. Стрелка снабжена изолированными от нее пружинными контактами 4.
Корпус, в котором смонтирован указатель азимута, закреплен на двух полуосях и под действием груза 5 занимает положение, при котором ось магнитной стрелки всегда ориентирована вертикально.
Датчик угла искривления состоит из отвеса 6, стрелки 7 и градуированного электрического сопротивления (углового реохорда) 8. Плоскость качания отвеса перпендикулярна к плоскости рамки и совпадает с плоскостью искривления скважины.
В инклинометре установлен электромагнит, который по команде с поверхности фиксирует или освобождает магнитную стрелку и отвес. С помощью коллектора с тремя контактными кольцами 9 и двумя парами щеток 10 к измерительной цепи подключаются с помощью переключателя П (рис. 5) либо реохорд угла наклона, либо датчик азимута.

Рис.5. Принципиальная электрическая схема инклинометра
При изменении азимута магнитная стрелка пружинными контактами 4 закорачивает часть реохорда. Сопротивление незамкнутой части  пропорционально азимуту φ. При измерении угла стрелка указателя угла отклонения, жестко скрепленная с отвесом, переместится на дугу δ и закоротит реохорд. Сопротивление незакороченного участка реохорда пропорционально азимуту φ. При измерении угла стрелка указателя угла отклонения, жестко скрепленная с отвесом, переместится на дугу δ и закоротит реохорд. Сопротивление незакороченного участка реохорда  пропорционально углу δ. пропорционально углу δ.
ЦЖК – центральная жила кабеля; ОК – оплётка кабеля.
Углы отклонения измеряют при фиксированном положении всех чувствительных элементов. Для замеров и используют мостовую схему.
Три плеча моста имеют постоянное сопротивление и установлен! на поверхности в панели управления. Сопротивления  и и  включаются при измерении углов, сопротивления включаются при измерении углов, сопротивления  и и  – при измерении азимута; – при измерении азимута;  – общее сопротивление моста. Четвертое плечо слагается из сопротивления жилы кабеля, переменного сопротивление – общее сопротивление моста. Четвертое плечо слагается из сопротивления жилы кабеля, переменного сопротивление  , предназначенного для компенсации изменения сопротивление жилы кабеля, и сопротивлений реохорда угла наклона , предназначенного для компенсации изменения сопротивление жилы кабеля, и сопротивлений реохорда угла наклона  или магнитной буссоли или магнитной буссоли  . .
В одну диагональ моста АВ подключен источник тока Е, в другую диагональ моста MN – гальванометр G. Переменное сопротивление  служит для компенсации моста при измерении или . служит для компенсации моста при измерении или .
В настоящее время выпускаются инклинометры как для использования на одножильном кабеле, так и сбрасываемые в бурильную колонну (извлечение производится после подъема бурильной колонны либо с помощью овершота съёмной грунтоноски).
2. Оценка погрешностей измерения
Погрешности инклинометрических исследований обусловлены в общем случае принятой методикой расчета координат оси ствола скважины, погрешностями измерения глубины, шагом измерения для точечных и квантования для непрерывных инклинометров (методическими погрешностями), погрешностями, вызываемыми непараллельной установкой скважинного прибора относительно оси скважины и заметной кривизной ее ствола на длине прибора (установочными погрешностями), а также погрешностями, вызванными конечной точностью измерения углов искривления скважин (так называемыми инструментальными погрешностями).
Методические погрешности, независимо от принятой методики расчета координат, определяются выбранным шагом измерений, интенсивностью искривления оси скважин, характером искривления (постоянная интенсивность, меняющаяся с глубиной интенсивность и т.д.).
Установочные погрешности не зависят от шага измерений и погрешностей инклинометра и определяются, в первую очередь, геометрическими параметрами - соотношением диаметров ствола скважины и охранного кожуха прибора, его длиной, наличием и характером кавернозности ствола, местом привязки данных инклинометрии по глубине относительно скважинного прибора и т.д., а также параметрами искривления оси скважины.
В непрерывных инклинометрах установочные погрешности менее существенны, в точечных они могут быть снижены или вовсе исключены путем отбраковки замеров в точках, где установочные погрешности превышают допустимые значения.
Из практики инклинометрии скважин следует, что при малых интенсивностях искривления (до 0,02 град/м) превалирующее значение имеют инструментальные погрешности, с которыми при увеличении интенсивности искривления становятся соизмеримы погрешности установочные.
При значительных интенсивностях искривления и сложном характере искривления оси скважины преобладающими становятся методические и установочные погрешности.
Снижение погрешностей инклинометров не может однозначно обеспечить снижение суммарных погрешностей инклинометрических исследований, равно как не решает эту задачу и только усовершенствование методики расчета координат.
Существенный вклад в суммарную погрешность могут вносить также дополнительные погрешности, входящие в состав суммарной инструментальной, а именно: от температуры, влияющей на линейные размеры и электрические параметры преобразователей в скважинном приборе, нестабильности источников питания, изменения сопротивления кабеля и утечек, механических колебаний скважинного прибора после установки его на точку измерений за счет упругих свойств кабеля большой длины и т.д.
Анализ методических и установочных погрешностей результатов инклинометрических измерений должен выполняться в процессе аттестации методик измерений с целью определения их количественных значений, а также с целью установления ограничений применимости этих методик.
Ведомственная поверочная схема для инклинометров и ориентаторов, устанавливающая порядок передачи размера единицы плоского угла (азимута, зенитного и апсидального углов) приведена в приложение 1.
В качестве исходных образцовых средств измерений в поверочной схеме предусмотрено использование образцовых многогранных призм 4-го разряда и автоколлиматоров 3-го разряда из государственной поверочной схемы по ГОСТ 8.061-80 с погрешностью  10". 10".
В качестве образцовых средств измерений используются аттестованные теодолиты и оптические квадранты с погрешностью 30", специальные средства поверки (ориентирующая приставка «Курс», установочный стол УСИ-2 и т. п.) и установки поверки инклинометров и ориентаторов (УПСП, УПН, УОП-2, УПМ и т. п.).
Образцовые средства измерений применяются для градуировки и поверки рабочих средств измерений (инклинометров и ориентаторов) методом прямых измерений.
Для обеспечения заданных критериев качества поверки ( = 0,15 и = 0,15 и  =1,1) соотношение между пределами основной погрешности исходных образцовых средств измерений, заимствованных из государственной поверочной схемы и образцовых средств измерений не должно превышать 1:3. =1,1) соотношение между пределами основной погрешности исходных образцовых средств измерений, заимствованных из государственной поверочной схемы и образцовых средств измерений не должно превышать 1:3.
В качестве рабочих средств измерений применяют инклинометры (ГОСТ 24151-87 (СТ СЭВ 1460-86)) и ориентаторы.
Соотношение между пределами допускаемой основной погрешности образцовых и рабочих средств измерений не должно превышать 1:3 при обеспечении заданных критериев качества поверки = 0,2 и =1,15.
При градуировке инклинометров выходным сигналам по каждому из измерительных каналов (зенитный угол, азимут) комплекта скважинный прибор - наземная панель ставят в соответствие значения зенитных углов и азимутов, задаваемых скважинному прибору на образцовой поверочной установке.
При поверке инклинометра сравнивают значения зенитных углов и азимутов (для инклинометров, имеющих канал измерения визирного угла - также и значения визирного угла), полученных отградуированным комплектом, со значениями тех же величин, принимаемых за «истинные», задаваемых поверочной установкой, и определяют характеристики инструментальной погрешности.
Объем операций при определении метрологических характеристик и применяемые для этих целей технические средства в зависимости от пределов основной погрешности поверяемого инклинометра представлены в таблице1.
Вблизи помещения и в помещении, где проводят поверку инклинометров (кроме гироскопических), должны отсутствовать мощные источники электрических, магнитных и электромагнитных полей, в зоне поверки необходимо оценить однородность магнитного поля и провести определение оптимального положения корпуса инклинометра в зажимном устройстве поверочной установки.
Таблица 1
Операции поверки и технические средства поверки
| Операция |
Предел основной погрешности поверяемого инклинометра |
Средства поверки и их характеристики |
| Определение основной погрешности измерения зенитных углов, сек |
10; 15
30; 40
|
Поверочное приспособление для задания азимута от 0 до 360° и зенитного угла в диапазоне измерений инклинометром, квадрант оптический с допустимой погрешностью не более
Стол УСИ, установки УОП-2, УПМ, УПН или поверочное приспособление для задания углов и угломер-квадрант с допустимой погрешностью не более
|
Определение основной погрешности измерения
азимута, градус
|
1; 2
4; 6
|
Поверочное приспособление для задания углов, теодолит с допустимой погрешностью не более  30 и ориентир буссоль с допустимой погрешностью не более 30 и ориентир буссоль с допустимой погрешностью не более
Стол УСИ, установки УОП-2, УПМ, УПИ
или поверочное приспособление для задания углов и буссоль с допускаемой погрешностью не более
|
| Определение курсового ухода гироскопа во времени (для гироскопических инклинометров), градусы за 30 мин |
5 - 10 |
Стол УСИ, установки УОП-2, УПМ, УПН, угломер-квадрант с допустимой погрешностью не более 6' буссоль с допустимой погрешностью не более 1°, секундомер с диапазоном измерений не менее 0-30 мин |
Однородность магнитного поля в диапазоне воспроизводимых при поверке положений чувствительных элементов канала измерений азимута поверяемого инклинометра оценивают с помощью поверочного приспособления с теодолитом, буссолью и немагнитного имитатора скважинного прибора (рис.6).
Имитатор скважинной части инклинометра устанавливают при помощи поверочного приспособления в положение, отклоненное от вертикали на 3-4°, буссоль закрепляют на имитаторе в горизонтальном положении и, разворачивая имитатор по азимуту, конец стрелки буссоли совмещают с нулем шкалы буссоли.
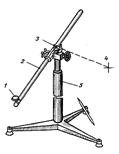
1-буссоль, 2-инклинометр (немагнитный имитатор), 3-теодолит, 4-реперная метка, 5-поверочное приспособление.
Рис.6 Установка для проверки инклинометров
Оптическую ось зрительной трубы теодолита совмещают с реперной точкой, которая должна находиться не ближе 3 м. от теодолита. Смещение вертикальной оси теодолита относительно вертикальной оси поверочной установки или поверочного приспособления при этом не должно превышать см. Горизонтальную шкалу теодолита устанавливают на нуль, поверочную установку (поверочное приспособление) разворачивают на 30°, контролируя угол поворота по шкале буссоли.
Оптическую ось зрительной трубы теодолита поворотом теодолита совмещают с реперной точкой и снимают показания с горизонтальной шкалы теодолита. Разность показаний теодолита и буссоли характеризует искажение магнитного поля в данной точке.
Задавая имитатору последовательно азимуты 60°, 90° и т.д., по показаниям буссоли через каждые 30° оценивают однородность магнитного поля во всем диапазоне азимутов.
Указанные операции повторяют для двух значений отклонения имитатора от вертикали, соответствующих зенитным углам, при которых поверяют инклинометр по азимуту.
Магнитное поле в зоне поверки инклинометра считается однородным, если отклонения направления горизонтальной составляющей магнитного вектора не превышают основной допускаемой погрешности буссоли.
Для определения оптимального положения корпуса инклинометра в зажимном устройстве поверочной установки используют специальное приспособление в виде кольца со стопором, на боковой поверхности которого сделана разметка (проведены образующие) через каждые 30° с погрешностью, не превышающей 5, (рис. 7). Приспособление устанавливается на охранный кожух прибора инклинометра, установленного в поверочную установку. На торце зажимного устройства поверочной установки ставится метка. Скважинному прибору инклинометра при помощи поверочной установки задается минимальный зенитный угол, при котором в технической документации на него нормируется погрешность измерения азимута (например, 4° для инклинометра типа КИТ, КИТ-А, МИР-36, 3° для инклинометра типа ИН-1-721, 2° для инклинометра типа ИГ-36 и т.д.).
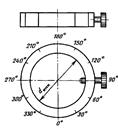
Рис.7 Вспомогательное кольцо.
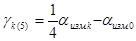
При любом значении азимута, заданном на поверочной установке (например 30°) скважинный прибор инклинометра устанавливается таким образом, чтобы отметка «0» на приспособлении совпадала с меткой на торце зажимного устройства поверочной установки. Выполняется не менее четырех измерений установленного азимута при подходе к заданному азимуту со стороны меньших и больших значений. Скважинный прибор инклинометра поворачивают вокруг собственной оси на 30° (до следующей отметки на приспособлении) и снова четыре раза измеряют азимут, заданный на поверочной установке. Измерив таким образом установленный азимут при различных положениях скважинного прибора относительно отметки на торце зажимного устройства через каждые 30° в диапазоне 0-360°, т. е. при полном обороте скважинного прибора инклинометра относительно своей оси, строят график зависимости систематической составляющей погрешности измерения азимута  (α) от положения охранного кожуха скважинного прибора инклинометра относительно апсидальной плоскости скважинного прибора (ψ) (рис. 8). По полученному графику определяют положение охранного кожуха скважинного прибора инклинометра относительно метки на торце зажимного устройства поверочной установки, при котором систематическая составляющая погрешности измерения азимута имеет максимальные значения со знаком «плюс» или «минус», и отмечается на приспособлении. (α) от положения охранного кожуха скважинного прибора инклинометра относительно апсидальной плоскости скважинного прибора (ψ) (рис. 8). По полученному графику определяют положение охранного кожуха скважинного прибора инклинометра относительно метки на торце зажимного устройства поверочной установки, при котором систематическая составляющая погрешности измерения азимута имеет максимальные значения со знаком «плюс» или «минус», и отмечается на приспособлении.
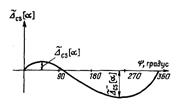
Рис.8 График зависимости систематической составляющей погрешности измерения азимута от положения охранного кожуха.
Основную погрешность инклинометра по зенитному углу определяют в начале, конце и в трех-пяти промежуточных точках диапазона измерений.
В каждой точке заданный зенитный угол измеряют не менее двух раз при приближении к заданному зенитному углу со стороны больших и меньших значений, при этом при установке прибора в поверочную установку корпус скважинного прибора инклинометра необходимо развернуть на 90° вокруг своей оси относительно метки на вспомогательном кольце (см. рис. 8), соответствующей одному из максимальных значений систематической составляющей погрешности измерения азимута. Выполнив два измерения зенитного угла, корпус прибора разворачивают относительно своей оси на 180° и измерения повторяют.
Основную погрешность инклинометра при измерении азимута определяют, выполняя не менее двух измерений при положении скважинного прибора, соответствующем максимальному значению систематической составляющей погрешности азимута со знаком «плюс» и не менее двух - со знаком «минус».
Скважинному прибору, помещенному в поверочную установку (приспособление) задается наименьшее значение зенитного угла, для которого в технической документации на конкретный тип инклинометра нормируется погрешность измерения азимута.
Азимут измеряют при значениях азимута 5, 30, 60, 90, ..., 330, 355° и задании их со стороны меньших и больших значений. Аналогично находят азимуты при других зенитных углах (включая максимальное его значение, соответствующее середине диапазона измерения).
Основную погрешность измерения визирного угла определяют при минимальном зенитном угле, для которого в технической документации на конкретный тип инклинометра нормируется погрешность измерения визирного угла.
Прибору задают значения визирных углов, равные 0, 30,..., 60° и т. д., причем в каждой задаваемой точке выполняют не менее четырех измерений при задании визирного угла со стороны больших и меньших значений.
Систематическую составляющую основной погрешности инклинометра для каждого  -го значения установленного угла (зенитного, азимута или визирного) -го значения установленного угла (зенитного, азимута или визирного)  ( ( ) определяют по формуле ) определяют по формуле
 (4) (4)
где m - число измерений заданного угла (m 4); 4);  показания инклинометра при j - ом измерении k- гo значения установленного угла (зенитного, азимута или визирного), где j = 1, 2, 3, ..., m; показания инклинометра при j - ом измерении k- гo значения установленного угла (зенитного, азимута или визирного), где j = 1, 2, 3, ..., m;  - действительное значение задаваемого k-го угла (зенитного, азимута или визирного). - действительное значение задаваемого k-го угла (зенитного, азимута или визирного).
Среднее квадратическое отклонение случайной составляющей основной погрешности инклинометра для каждого k- го значения установленного угла  равно равно
 (5) (5)
Граница случайной составляющей основной погрешности инклинометра  для доверительной вероятности Р = 0,95 при измерении k- то значения установленного угла равна для доверительной вероятности Р = 0,95 при измерении k- то значения установленного угла равна
 = =  . (6) . (6)
Нижнюю и верхнюю границы интервала  , ,  , в котором с вероятностью Р = 0,95 находится погрешность инклинометра при измерении k-го значения установленного угла, определяют по формуле , в котором с вероятностью Р = 0,95 находится погрешность инклинометра при измерении k-го значения установленного угла, определяют по формуле
 (7) (7)
Основную абсолютную погрешность инклинометра при измерении k- то значения установленного угла необходимо оценивать по формуле
 (8) (8)
При необходимости повышения инструментальной точности инклинометра путем исключения систематической составляющей погрешности следует строить графики поправок к показаниям инклинометра.
Инклинометр считают годным к эксплуатации, если выполняются следующие условия:

 (9) (9)

где  - оценка систематической составляющей основной погрешности инклинометра в заданной точке диапазона измерения установленного угла; - оценка систематической составляющей основной погрешности инклинометра в заданной точке диапазона измерения установленного угла;  ; ;  - коэффициенты, равные отношению контрольного допуска (соответственно - коэффициенты, равные отношению контрольного допуска (соответственно  ]; ];  , ,  ) к пределу допускаемой погрешности (соответственно ) к пределу допускаемой погрешности (соответственно  , ,  , ,  ). Значения и изменяются в пределах от 0,8 до 1,0 в зависимости от отношения пределов допускаемой погрешности образцовых и поверяемых СИ. ). Значения и изменяются в пределах от 0,8 до 1,0 в зависимости от отношения пределов допускаемой погрешности образцовых и поверяемых СИ.
Курсовой уход гироскопа во времени для гироскопических инклинометров тоже определяют, задавая скважинному прибору наименьшее значение зенитного угла, при котором нормируется значение курсового ухода гироскопа во времени.
Прибору задают произвольный азимут и с интервалом 15 с производят четыре измерения азимута.
Среднее значение измеренного азимута  определяют по формуле определяют по формуле
 (10) (10)
где - значения азимута, измеренные инклинометром через 15 с.
Измерения повторяются через каждые 5 мин в течение 30 мин.
Для каждого k - то момента времени определяется значение курсового ухода гироскопа по формуле
 (11) (11)
Среднее значение курсового ухода гироскопа за 5 мин равно
 (12) (12)
Инклинометр считается годным к эксплуатации, если выполняются следующие условия
 , ,  (13) (13)
где  , ,  - допустимый курсовой уход гироскопа за 5 и 30 мин соответственно, нормированный в технической документации на поверяемый прибор. - допустимый курсовой уход гироскопа за 5 и 30 мин соответственно, нормированный в технической документации на поверяемый прибор.
При обработке результатов измерений в скважине азимутальных, зенитных и визирных углов могут быть учтены систематические погрешности инклинометра по этим каналам, определенные при поверке.
С этой целью для конкретных типов инклинометров строят график поправок (рис. 9).
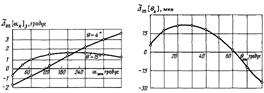
Рис.9 График поправок к показаниям инклинометра по зенитному углу (слева) и по азимуту (справа).
Границы погрешности инклинометра  , при измерениях с использованием графика поправок к показаниям измеряемых значений углов определяются формулой , при измерениях с использованием графика поправок к показаниям измеряемых значений углов определяются формулой
 (14) (14)
где  - основная допускаемая погрешность поверочной установки или образцового средства при использовании поверочного приспособления; - основная допускаемая погрешность поверочной установки или образцового средства при использовании поверочного приспособления;  -граница случайной составляющей основной погрешности инклинометра при измерении k- го значения j- го угла. -граница случайной составляющей основной погрешности инклинометра при измерении k- го значения j- го угла.
Аттестация образцовых поверочных установок сводится к определению и устранению неперпендикулярностей их осей вращения, установке уровней в горизонтальной плоскости, ориентации установки в пространстве, обеспечивающей совмещение вертикальной оси вращения с направлением гравитационного вектора, а продольной оси зажима-с горизонтальной составляющей геомагнитного вектора и оценке погрешностей задания азимута, визирных и зенитных углов.
3. Феррозондовые инклинометры
Феррозонд, феррозондовый магнитометр, прибор для измерения и индикации магнитных полей (в основном постоянных или медленно меняющихся) и их градиентов. Действие феррозонда основано на изменении магнитного состояния ферромагнетика под воздействием двух магнитных полей разных частот. В простейшем варианте феррозонд состоит из стержневого ферромагнитного сердечника и находящихся на нём двух катушек: катушки возбуждения, питаемой переменным током, и измерительной (сигнальной) катушки. В отсутствие измеряемого магнитного поля сердечник под действием переменного магнитного поля, создаваемого током в катушке возбуждения, перемагничивается по симметричному циклу. Изменение магнитного потока, вызванное перемагничиванием сердечника по симметричной кривой, индуцирует в сигнальной катушке эдс, изменяющуюся по гармоническому закону. Если одновременно на сердечник действует измеряемое постоянное или слабо меняющееся магнитное поле, то кривая перемагничивания изменяет свои размеры и форму и становится несимметричной. При этом изменяется величина и гармонический состав эдс индукции в сигнальной катушке. В частности, появляются чётные гармонические составляющие эдс, величина которых пропорциональна напряжённости измеряемого поля и которые отсутствуют при симметричном цикле перемагничивания.
Как правило, феррозонд состоит из двух сердечников с обмотками, которые соединены так, что нечётные гармонические составляющие практически компенсируются. Тем самым упрощается измерительная аппаратура и повышается чувствительность феррозонда. Наиболее распространённые феррозондовые установки имеют следующие основные узлы: генератор переменного тока, питающий обмотку возбуждения, фильтр для нечётных гармонических составляющих эдс, подключенный на выходе измерительной катушки, усилитель чётных гармоник и выходной измерительный прибор. Феррозонды обладают очень высокой чувствительностью к магнитному полю (до 10-4–10-5 а/м).
Феррозонд применяют для измерения земного магнитного поля и его вариаций в частности, при поисках полезных ископаемых, создающих локальные аномалии геомагнитного поля; для измерения магнитных полей Луны, планет, межпланетного пространства; для обнаружения ферромагнитных предметов и частиц в неферромагнитной среде; в системах контроля за качеством выпускаемой продукции (магнитная дефектоскопия и др.).
Магнитная дефектоскопия основана на исследовании искажений магнитного поля, возникающих в местах дефектов в изделиях из ферромагнитных материалов. Индикатором может служить магнитный порошок (закись-окись железа) или его суспензия в масле с дисперсностью частиц 5–10 мкм. При намагничивании изделия порошок оседает в местах расположения дефектов (метод магнитного порошка). Поле рассеяния можно фиксировать на магнитной ленте, которую накладывают на исследуемый участок намагниченного изделия (магнитографический метод). Используют также малогабаритные датчики (феррозонды), которые при движении по изделию в месте дефекта указывают на изменения импульса тока, регистрирующиеся на экране осциллоскопа (феррозондовый метод).
Измерителем поля в феррозондовом магнитометре является феррозонд (или магнитомодулярный датчик), представляющий собой катушку с ферромагнитным сердечником. Первичная обмотка сердечника возбуждается от вспомогательного звукового генератора частотой 200 гц. Под его воздействием меняется магнитная проницаемость материала сердечника, а это, вследствие законов индукции, приводит к тому, что во вторичной обмотке катушки возникает электродвижущая сила, пропорциональная вектору напряженности магнитного поля Земли, направленному вдоль оси сердечника.
Для измерения вертикальной составляющей феррозонд ориентируется по вертикали особым маятником, помещенным в кардановом подвесе. Последний снабжен демпфирующим устройством для быстрого затухания колебаний. Феррозонд подключается к измерительному блоку. В нем помещен звуковой генератор, переключатель поддиапазонов, переключатель компенсации магнитного поля, измерительный индикаторный прибор. Среди отечественных магнитометров к этому типу относится магнитометр М-17, предназначенный для измерения с точностью до 15 нТл.
Использование геомагнитных приборов на основе магнитных датчиков (феррозондов), обеспечивающих учет поправки дирекционного угла, позволяет избавиться от части погрешности измерения. Поэтому в ряде систем местоопределения магнитные датчики направления, представляющие, как правило, трехкомпонентные измерители магнитного поля Земли, дополняются другими приборами, позволяющими компенсировать искажения магнитного поля, возникающие из-за различных факторов. В качестве таких приборов наиболее часто используются датчики ускорения - акселерометры
. Сочетание магнитных датчиков направления с акселерометром иногда называют бесплатформенным магнитным компасом
.
Принцип работы этого прибора состоит в следующем. Магнитные датчики измеряют полный вектор магнитного поля Земли. Однако для вычисления направления необходимо знать не полный вектор, о только его горизонтальную составляющую. Для этого с помощью трехкомпонентного акселерометра определяется направление вертикали в приборной системе координат, после чего вычисляются величина и направление горизонтальной составляющей магнитного поля Земли по отношению к скважине, т.е. её направление. Устранения погрешностей, связанных с искажениями магнитного поля Земли, можно добиться путем предварительной калибровки прибора, для чего достаточно снять показания магнитных датчиков в четырех положениях, получающихся поворотом прибора на 90° в горизонтальной плоскости.
В настоящее время известны акселерометры тензорезистивного, пьезорезистивного и пьезоэлектрического типа. Однако пока они имеют значительные габариты и массу, а также энергопотребление. Более перспективным направлением можно считать создание чувствительных элементов (ЧЭ) датчиков ускорения на основе емкостного принципа преобразования с использованием электростатической компенсации на материалах из кремния. ЧЭ, разработанные на основе этой технологии, получили название микромеханических. Конструкция ЧЭ емкостного типа представляет собой плоский дифференциальный конденсатор, имеющий две неподвижные пластины и внутренний подвижный электрод. Для таких чувствительных элементов характерны потенциально высокая термоустойчивость, стабильность метрологических характеристик во времени, отсутствие шумов и самонагрева. Принцип действия емкостного акселерометра основан на измерении разности емкостей между подвижным электродом и неподвижными пластинами. При отсутствии воздействия ускорения воздушные зазоры между подвижным электродом и неподвижными пластинами одинаковы, и соответственно сохраняется равенство значений емкостей. При воздействии ускорения в каком-либо направлении изменяются величины воздушных зазоров, в результате чего появляется разность емкостей и токов, протекающих через эти емкости. С помощью дифференциального усилителя эта разность усиливается и преобразуется в выходное напряжение, пропорциональное величине ускорения. Акселерометры на основе емкостных чувствительных элементов позволяют измерять ускорения до нескольких десятков м/с2
, имеют ток потребления в пределах единиц мА, могут быть выполнены в виде интегральных микросхем. Кроме акселерометров, в качестве корректоров геомагнитных приборов могут использоваться датчики угловой скорости на основе гироскопов
. Принцип действия которых основан но эффекте Саньяка. По круговому оптическому пути благодаря расщеплению луча свет распространяется в двух противоположных направлениях. Если система находится в покое относительно инерционного пространство, оба световых луча распространяются встречно по оптическому пути одинаковой длины, поэтому при сложении лучей в расщепителе нет фазового сдвига. Однако когда оптическая система вращается в инерциальном пространстве, между световыми волнами возникает разность фаз, пропорциональная угловой скорости вращения. Имеется также информация о создании гироскопов на основе электрохимических преобразователей, гирочувствительных пьезорезонансных датчиков, емкостных преобразователей.
Датчик направления (феррозонд) представляет собой три ортогонально расположенных датчика магнитного поля. На выходе феррозонда присутствует аналоговый сигнал, величина которого пропорциональна углу поворота относительно магнитного меридиана Земли. Датчик ускорения (акселерометр) представляет собой три ортогонально расположенных емкостных датчика ускорения. На выходе присутствует сигнал, пропорциональный измеряемому ускорению. Датчик служит для устранения ошибки феррозонда, возникающей из-за негоризонтального расположения объекта относительно поверхности Земли.
4. Гироскопические инклинометры
Гироскоп - быстро вращающееся твёрдое тело, ось вращения которого может изменять своё направление в пространстве. Гироскоп обладает рядом интересных свойств, наблюдаемых у вращающихся небесных тел, у артиллерийских снарядов, у детского волчка, у роторов турбин, установленных на судах, и др. Свойства гироскопа к проявляются при выполнении двух условий: 1) ось вращения гироскопа должна иметь возможность изменять своё направление в пространстве; 2) угловая скорость вращения гироскопа вокруг своей оси должна быть очень велика по сравнению с той угловой скоростью, которую будет иметь сама ось при изменении своего направления.
Первое свойство уравновешенного гироскопа с тремя степенями свободы состоит в том, что его ось стремится устойчиво сохранять в мировом пространстве приданное ей первоначальное направление. Если эта ось вначале направлена на какую-нибудь звезду, то при любых перемещениях основания прибора и случайных толчках она будет продолжать указывать на эту звезду, меняя свою ориентировку относительно земных осей.
Второе свойство гироскопа обнаруживается, когда на его ось (или рамку) начинают действовать сила или пара сил, стремящиеся привести ось в движение (т. е. создающие вращающий момент относительно центра подвеса), движение гироскопа безынерционно.
Наиболее существенными признаками, характеризующими применяемые в технике разнообразные гироскопические приборы, являются: тип гироскопа, физический принцип построения чувствительного гироскопического элемента, тип подвеса, назначение гироскопические приборы.
Типы гироскопов.
Различают два основных типа гироскопов: с тремя и двумя степенями свободы. Гироскопы с тремя степенями свободы делятся на уравновешенные, или астатические, и неуравновешенные, или позиционные.
Астатическим называется гироскоп, у которого центр тяжести совпадает с точкой пересечения осей карданова подвеса (т. е. с точкой подвеса). Сила тяжести не влияет на движение оси такого гироскопа и её уходы при внешних возмущениях могут вызываться лишь моментами сил в осях подвеса (моменты сил трения и др.). При отсутствии моментов внешних сил гироскоп называется свободным. Хотя астатические гироскопы не обладают избирательностью по отношению к заданному направлению, т. е. "направляющей силой", стремящейся привести ось гироскопа в определенное положение, они используются в ряде гироскопических приборов например, в гироскопах направления, гировертикалях и др., причём прецизионные гироскопы могут применяться без корректирующих устройств.
Позиционным называется гироскоп, обладающий избирательностью по отношению к некоторому направлению; при отклонении его оси от этого направления возникает "направляющая сила", стремящаяся вернуть ось гироскопа в заданное положение. Для придания гироскопу позиционных свойств применяют два способа. Первый состоит в смещении центра тяжести гироскопа относительно точки подвеса. Он используется в гирокомпасах, у которых "направляющая сила" возникает при отклонении оси гироскопа от плоскости меридиана, и в гиромаятниках, у которых "направляющая сила" возникает при отклонении оси гироскопа от вертикали места. Другой способ состоит в применении астатического гироскопа и соответствующей системы коррекции, например маятниковой.
Гироскопы с двумя степенями свободы используют чаще всего в качестве дифференцирующих и интегрирующих гироскопов, которые осуществляют дифференцирование (или интегрирование) входного сигнала, т. е. измеряют производную (или интеграл) от той величины, на воздействие которой реагирует. Например, в гиротахометре дифференцирующий гироскоп, реагируя на поворот объекта, измеряет его угловую скорость, а поплавковый интегрирующий гироскоп, реагируя на угловую скорость объекта, измеряет угол его поворота.
Физические принципы построения чувствительных гироскопических элементов.
Различают гироскопы с механическим ротором, с жидкостным ротором, вибрационные, лазерные, ядерные. Наиболее распространены гироскопы с механическим ротором: у них носителем кинетического момента является быстровращающееся массивное твёрдое тело - ротор. Носителем кинетического момента может быть и жидкая среда. Вибрационные гироскопы в качестве чувствительного элемента содержат вибрирующие массы (например, ротор с упругим подвесом или упругие пластины) и служат для определения угловой скорости объекта. Лазерный гироскоп представляет собой устройство, в котором используется оптический квантовый генератор направленного излучения и содержится плоский замкнутый контур (образованный тремя и более зеркалами), где циркулируют два встречных световых потока (луча); он также служит для определения угловой скорости объекта (см. Квантовый гироскоп). Ядерный гироскоп основан на том свойстве, что ядро атома содержит протоны, обладающие спиновыми и орбитальными моментами количества движения, а также связанными с ними магнитными моментами. При этом наличие механического вращательного момента у ядра сообщает ему свойства гироскопа, а наличие магнитного момента даёт возможность ориентировать ось этого гироскопа в пространстве и определять её положение. Ядерные гироскопы могут использоваться в качестве стабилизаторов направления, датчиков угловых скоростей.
Типы подвесов гироскопов.
В гироскопах с механическим ротором различают механический, поплавковый, газовый, магнитный, электростатический типы подвесов. В большинстве используются гироскопы с механическим подвесом; выполненным в виде карданова подвеса
В различных двух- и трёхстепенных гироскопах для разгрузки механических опор применяются жидкостные, или поплавковые, подвесы (например, в поплавковом интегрирующем гироскопе), вследствие чего подобные гироскопы мало подвержены вибрационным, ударным и др. возмущающим воздействиям и обладают высокой точностью.
Существенное повышение точности достигается при применении гироскопов с газовым подвесом. Ротор такого гироскопа обычно имеет сферическую форму и опирается па чрезвычайно тонкий газовый слой, образующийся между шаром-ротором и специальной опорой. Такой шар является практически свободным гироскопом. Газовые опоры могут также применяться в осях подвеса ротора и кардановых колец.
Также используется гироскоп с магнитным подвесом, ротор которого, выполненный в виде ферритовой сферы, поддерживается магнитным полем во взвешенном состоянии. Необходимые характеристики поля автоматически регулируются специальной следящей системой. Другой разновидностью магнитного подвеса является т. н. криогенный подвес ротора, в котором используется взаимодействие магнитных полей, создаваемых токами в сверхпроводниках. Поддерживающие силы магнитного поля возникают при изменении положения ротора по отношению к элементам подвеса. Материал ротора, катушек электромагнитов и специальных экранов приводится в сверхпроводящее состояние путём глубокого охлаждения.
В гироскопе с электростатическим подвесом ротор представляет собой полую сферу, наружная поверхность которой имеет высокую проводимость. Ротор помещается между электродами, к которым подводится высокое напряжение, регулируемое специальной следящей системой. Под действием электростатических сил ротор центрируется в пространстве между электродами.
По назначению гироскопы подразделяют на следующие группы: 1) гироскопы для определения угловых отклонений объекта. Сюда относятся различные астатические и позиционные гироскопы, а именно: гироскопы направления, определяющие азимутальные отклонения объекта, и гировертикали или гиромаятники, определяющие отклонения объекта относительно плоскости горизонта; 2) гироскопы для определения угловых скоростей и угловых ускорений объекта, в которых используются дифференцирующие гироскопы. К ним относятся гиротахометры и вибрационные гироскопы, определяющие угловые скорости вращения объекта и гиротахоакселерометры, определяющие угловые скорости и угловые ускорения вращения объекта; 3) гироскопы для определения интегралов от входных величин, в которых используются интегрирующие гироскопы: гироскопические интеграторы угловых скоростей, определяющие углы отклонения объекта; интегро-дифференцирующие гироскопы, определяющие углы и угловые скорости вращения объекта, а также гироскопические интеграторы линейных ускорений, которые служат для нахождения линейной скорости объекта; 4) гироскопы для стабилизации объекта или отдельных приборов и устройств, а также для определения угловых отклонений объекта, называют гиростабилизаторами; 5) гироскопы для решения навигационных задач.
Квантовый гироскоп,
прибор, позволяющий обнаруживать вращение тела и определять его угловую скорость, основанный на гироскопических свойствах электронов, атомных ядер или фотонов.
Лазерный (оптический) гироскоп. Датчиком оптического гироскопа служит кольцевой лазер, генерирующий две бегущие навстречу друг другу световые волны, которые распространяются по общему световому каналу в виде узких монохроматических световых пучков.
Ядерные и электронные гироскопы. В ядерных квантовых гироскопах используются вещества с ядерным парамагнетизмом (вода, органические жидкости, газообразный гелий, пары ртути). Атомы или молекулы таких веществ в основном (невозбуждённом) состоянии обладают моментами количества движения, обусловленными только спинами ядер (электронные же спиновые моменты у них скомпенсированы, т. е. все электроны спарены). Со спинами ядер связаны их магнитные моменты. Если ориентировать магнитные моменты ядер, например при помощи внешнего магнитного поля, а затем ориентирующее поле выключить, то в отсутствие др. магнитных полей (например, земного) возникший суммарный магнитный момент М будет некоторое время сохранять своё направление в пространстве, независимо от изменения ориентации датчика. Такой статический квантовый гироскоп позволяет определить изменение положения тела, связанного с датчиком гироскопа.
В динамическом ядерном гироскопе суммарный ядерный магнитный момент М датчика прецессирует вокруг постоянного магнитного поля Н, жестко связанного с устройством. Вращение датчика вместе с полем Н с угловой скоростью W приводит к изменению частоты прецессии магнитного момента М, приблизительно равному проекции вектора W на Н. Это изменение регистрируется в виде электрического сигнала. Для получения высокой чувствительности и точности в этих приборах требуется высокая стабильность и однородность магнитного поля Н. Например, если поворот датчика обусловлен суточным вращением Земли, то остаточное поле в экране не должно превышать 3Ч10-9э.
Электронные квантовые гироскопы аналогичны ядерным, но в них применяются вещества, атомы или молекулы которых содержат неспаренные электроны (например, устойчивые свободные радикалы, атомы щелочных металлов). Хотя времена релаксации электронных спинов малы, электронные квантовые гироскопы перспективны, так как гиромагнитное отношение gэл для электронов в сотни раз больше, чем для ядер, и, следовательно, выше частота прецессии, что важно для многих применений.
Несмотря на то что квантовые гироскопы, особенно оптические, непрерывно совершенствуются, их точность и чувствительность ещё уступают лучшим образцам механических гироскопов. Однако К. г. обладают рядом существенных преимуществ перед механическими гироскопами: они не содержат движущихся частей (безынерционны), не требуют арретирования, обладают высокой надёжностью и стабильностью, приводятся в действие в течение короткого промежутка времени, могут выдержать значительные ускорения и работать при низких температурах.
Гироскопический интегратор
, гироскопическое устройство, содержащее т. и. интегрирующий гироскоп, который служит для определения интеграла от воздействующей на него величины. Различают гироскопический интегратор угловой скорости и гироскопический интегратор линейных ускорений.
Гироскопический интегратор угловой скорости служит для определения угла поворота объекта (наиболее совершенным является поплавковый). Поплавковый гироскопический интегратор является прецизионным прибором. Основные достоинства состоят в высокой точности (собственный уход - десятые и сотые доли градуса в 1 ч); малой подверженности вибрационным, ударным и др. возмущающим воздействиям; возможности использования для решения широкого класса задач, возлагаемых на гироскопические устройства.
Гироскопический интегратор линейных ускорений служит для определения составляющей линейной скорости центра тяжести объекта вдоль заданного направления. Он представляет собой гироскоп с тремя степенями свободы, центр тяжести которого смещен относительно точки подвеса. Вследствие этого гироскопический интегратор. чувствителен к поступательным ускорениям объекта, т.к. возникающий при этом момент сил инерции вызывает прецессию гироскопа с угловой скоростью, пропорциональной указанному моменту, т. е. величине ускорения объекта. Тогда угол прецессии будет пропорционален линейной скорости объекта, что позволяет, измерив этот угол, найти искомую скорость.
Гироскопический интегратор реагирует на кажущееся ускорение объекта, т. е. на разность между абсолютным ускорением объекта и гравитационным ускорением (ускорением силы тяготения). Вследствие этого показания прибора пропорциональны интегралу от кажущегося ускорения, т. е. кажущейся скорости.
Заключение
В данной работе были рассмотрены различные инклинометры, а также их типы - все они имеют свои преимущества и недостатки.
Недостатком гироскопических инклинометров является смещение оси от заданного направления во время замера вследствие трения, неуравновешенности и по другим причинам, что приводит к снижению точности измерений.
Использование приборов на основе магнитных датчиков (феррозондов), обеспечивающих учет поправки дирекционного угла, позволяет избавиться от части указанных недостатков, но имеют свои - невысокую точность, необходимость введения поправки на магнитное склонение и, главное, необходимость учета магнитных полей самого прибора и других факторов искажения магнитного поля Земли.
Наиболее перспективным технологическим и методологическим решением является совмещение двух типов инклинометров – гироскопов и феррозондов Таким образом, с помощью достоинств одного типа возможна компенсация недостатков другого.
Список литературы
1. Блюменцев А. М., “Метрологическое обеспечение геофизических исследований скважин”, Москва, “Недра”, 1991г.
2. Комаров С. Н., “Геофизические методы исследования скважин”, Москва, “Недра”, 1973г.
3. Чечурина Е. Н., “Приборы для измерения магнитных величин”, Москва, 1969г.
4. Ишлинский А. Ю., “Механика гироскопических систем”, Москва, 1963г.
Приложение 1

Пр.1. Ведомственная поверочная схема для инклинометров и ориентаторов
|
