Федеральное агентство по рыболовству Министерства сельского хозяйства Российской Федерации
Дальневосточный государственный технический рыбохозяйственный университет (Дальрыбвтуз)
Контрольная работа №1.
Системы управления технологическими процессами и информационными технологиями
Выполнил(а): Соколова Е. Ю.
Шифр: 061-ТД-584
Владивосток 2010
Содержание
1 Погрешности измерений и измерительных приборов
2 Логометры
3 Механические и гидростатические уровнемеры
4 Индукционные (электромагнитные) расходомеры
Список литературы
1 Погрешности измерений и измерительных приборов
Метрологические характеристики
Все средства измерений, независимо от их конкретного исполнения, обладают рядом общих свойств, необходимых для выполнения ими их функционального назначения. Технические характеристики, описывающие эти свойства и оказывающие влияние на результаты и на погрешности измерений, называются метрологическими характеристиками. Перечень важнейших из них регламентируется ГОСТ “Нормируемые метрологические характеристики средств измерений”. Комплекс нормируемых метрологических характеристик устанавливается таким образом, чтобы с их помощью можно было оценить погрешность измерений, осуществляемых в известных рабочих условиях эксплуатации посредством отдельных средств измерений или совокупности средств измерений, например автоматических измерительных систем.
Одной из основных метрологических характеристик измерительных преобразователей является статическая характеристика преобразования (иначе называемая функцией преобразования или градуировочной характеристикой). Она устанавливает зависимость Y=f(x) информативного параметра у выходного сигнала измерительного преобразователя от информативного параметра х входного сигнала.
Статическая характеристика нормируется путем задания в форме уравнения, графика или таблицы. Понятие статической характеристики применимо и к измерительным приборам, если под независимой переменной х понимать значение измеряемой величины или информативного параметра входного сигнала, а под зависимой величиной – показание прибора.
Если статическая характеристика преобразования линейна, т.е. Y=Kx, то коэффициент К называется чувствительностью измерительного прибора (преобразователя). В противном случае под чувствительностью следует понимать производную от статической характеристики.
Реклама

Важной характеристикой шкальных измерительных приборов является цена деления, т.е. то изменение измеряемой величины, которому соответствует перемещение указателя на одно деление шкалы. Если чувствительность постоянна в каждой точке диапазона измерения, то шкала называется равномерной. При неравномерной шкале нормируется наименьшая цена деления шкалы измерительных приборов. У цифровых приборов шкалы в явном виде нет, и на них вместо цены деления указывается цена единицы младшего разряда числа в показании прибора.
Важнейшей метрологической характеристикой средств измерений является погрешность.
Под абсолютной погрешностью меры понимается алгебраическая разность между ее номинальным Xн действительным Хд значениями:
 , ,
а под абсолютной погрешностью измерительного прибора – разность между его показанием  и действительным значением и действительным значением  измеряемой величины: измеряемой величины:
 . .
Абсолютная погрешность измерительного преобразователя может быть выражена в единицах входной или выходной величины. В единицах входной величины абсолютная погрешность преобразователя определяется как разность между значением входной величины X, найденной по действительному значению выходной величины и номинальной статической характеристике преобразователя, и действительным значением  входной величины: входной величины:
 . .
Однако в большей степени точность средства измерений характеризует относительная погрешность, т.е. выраженное в процентах отношение абсолютной погрешности к действительному значению измеряемой или воспроизводимой данным средством измерений величины:
Обычно  , поэтому в формулу вместо действительного значения часто может быть подставлено номинальное значение меры или показание измерительного прибора. , поэтому в формулу вместо действительного значения часто может быть подставлено номинальное значение меры или показание измерительного прибора.
Если диапазон измерения прибора охватывает и нулевое значение измеряемой величины, то относительная погрешность обращается в бесконечность в соответствующей ему точке шкалы. В этом случае пользуются понятием приведенной погрешности, равной отношению абсолютной погрешности измерительного прибора к некоторому нормирующему значению  : :
В качестве нормирующего значения принимается значение, характерное для данного вида измерительного прибора. Это может быть, например, диапазон измерений, верхний предел измерений, длина шкалы и т.д.
Погрешности измерительных средств принято подразделять на статические, имеющие место при измерении постоянных величин после завершения переходных процессов в элементах приборов и преобразователей, и динамические, появляющиеся при измерении переменных величин и обусловленные инерционными свойствами средств измерений.
Реклама

Согласно общей классификации, статические погрешности измерительных средств делятся на систематические и случайные.
Систематические погрешности являются в общем случае функцией измеряемой величины, влияющих величин (температуры, влажности, напряжения питания и пр.) и времени. В функции измеряемой величины систематические погрешности находят при поверке и аттестации образцовых приборов, например, измерением наперед заданных значений измеряемой величины в нескольких точках шкалы. В результате строится кривая или создается таблица погрешностей, которая используется для определения поправок. Поправка в каждой точке шкалы численно равна систематической погрешности и обратна ей по знаку, поэтому при определении действительного значения измеряемой величины поправку следует прибавить к показанию прибора. Так, если поправка к показанию динамометра 120 Н равна +0.6 Н, то действительное значение измеряемой силы составляет 120+0.6=120.6 Н. Удобнее пользоваться поправкой, чем систематической погрешностью, поэтому приборы чаще снабжают кривыми или таблицами поправок.
Систематическую погрешность в функции измеряемой величины можно представить в виде суммы погрешности схемы, определяемой самой структурной схемой средства измерений, и технологических погрешностей, обусловленных погрешностями изготовления его элементов.
Как те, так и другие виды погрешностей можно рассматривать в качестве систематических лишь при измерении постоянной величины с помощью одного экземпляра измерительного прибора. В массе же измерений различных значений физической величины, осуществляемых одним или многими приборами того же типоразмера, эти систематические погрешности приходится относить к классу случайных.
Между погрешностями схемы и технологическими погрешностями средств измерений существует принципиальная разница. Если первые накладывают свой отпечаток на характер изменения по шкале суммарной погрешности всех средств измерений данного типоразмера, то технологические погрешности индивидуальны для каждого экземпляра, т. е. их значения в одних и тех же точках шкалы различны для различных экземпляров приборов.
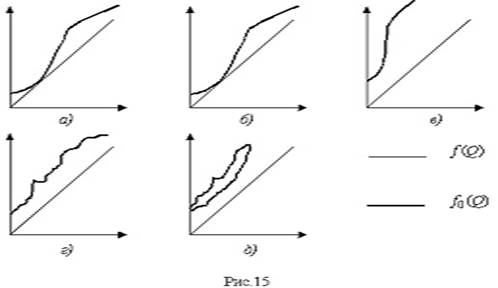
Результатом их проявления является:
а) поступательное смещение статической характеристики относительно характеристики идеального прибора и возникновение погрешности, постоянной в каждой точке шкалы; эта погрешность называется аддитивной.
б) поворот статической характеристики и появление погрешности, линейно возрастающей или убывающей с ростом измеряемой величины и называемой мультипликативной погрешностью.
в) нелинейные искажения статической характеристики.
г) появление погрешности обратного хода, выражающейся в несовпадении статических характеристик прибора при увеличении и уменьшении измеряемой величины .
Динамические погрешности обусловливаются инерционными свойствами средств измерений и появляются при измерении переменных во времени величин. Типичным случаем является измерение с регистрацией сигнала, изменяющегося со временем. Если Х(t) и Y(t) – сигналы на входе и на выходе средства измерений с чувствительностью К, то динамическая погрешность
 . .
Для средств измерений, являющихся линейными динамическими системами с постоянными во времени параметрами, наиболее общая характеристика динамических свойств – это дифференциальное уравнение. В этом случае уравнение линейное с постоянными коэффициентами:
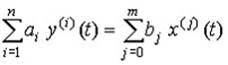 , ,
где  и и  – i-e и j-e производные входного и выходного сигналов; аj и bj – постоянные коэффициенты, n и m – порядок левой и правой частей уравнения, причем n < m. Дифференциальное уравнение является метрологической характеристикой средств измерения, поскольку позволяет при известном сигнале на входе x(t) найти выходной сигнал y(t) и после подстановки их в выражение (83) вычислить динамическую погрешность. – i-e и j-e производные входного и выходного сигналов; аj и bj – постоянные коэффициенты, n и m – порядок левой и правой частей уравнения, причем n < m. Дифференциальное уравнение является метрологической характеристикой средств измерения, поскольку позволяет при известном сигнале на входе x(t) найти выходной сигнал y(t) и после подстановки их в выражение (83) вычислить динамическую погрешность.
Для нормирования динамических свойств средств измерения часто указывают на дифференциальное уравнение, а другие, производные от него динамические характеристики, находятся экспериментальным путем. Сюда относятся передаточная функция, амплитудная и фазовая частотные характеристики, переходная и импульсная переходная функции.
К числу метрологических характеристик средств измерения относятся и неинформативные параметры выходного сигнала измерительного преобразователя, поскольку они могут оказывать существенное влияние на погрешность средства измерений. Например, непостоянство амплитуды колебаний баланса наручных часов (неинформативный параметр) приводит к изменению частоты его колебаний (информативный параметр).
При восприятии измеряемой величины или измерительного сигнала средство измерений оказывает некоторое воздействие на объект измерения или на источник сигнала. Результатом этого воздействия может быть некоторое изменение измеряемой величины относительно того значения, которое имело место при отсутствии средства измерений. Такое обратное воздействие средства измерений на объект измерений особенно четко просматривается при измерении электрических величин. Так, ЭДС нормального элемента определяется как напряжение на его зажимах в режиме холостого хода. При измерении этого напряжения вольтметром с некоторым конечным входным сопротивлением результат измерения будет зависеть от соотношения между внутренним сопротивлением нормального элемента (его выходное сопротивление) и входным сопротивлением вольтметра. Для оценки возникающей при этом погрешности необходимо знать значения этих сопротивлений, поэтому их следует рассматривать как метрологические характеристики.
Влияние внешних воздействий и неинформативных параметров сигналов (влияющих величин) описывается с помощью метрологических характеристик, называемых функциями влияния. Функция влияния  – это зависимость соответствующей метрологической характеристики из числа вышеперечисленных от влияющих величин – это зависимость соответствующей метрологической характеристики из числа вышеперечисленных от влияющих величин  (температуры внешней среды, параметров внешних вибраций и т.д.). В большинстве случаев можно ограничиться набором функций влияния каждой из влияющих величин (температуры внешней среды, параметров внешних вибраций и т.д.). В большинстве случаев можно ограничиться набором функций влияния каждой из влияющих величин  , но иногда приходится использовать функции совместного влияния нескольких величин, если изменение одной из влияющих величин приводит к изменению функции влияния другой. , но иногда приходится использовать функции совместного влияния нескольких величин, если изменение одной из влияющих величин приводит к изменению функции влияния другой.
2 Логометры
Логометр предназначен для измерения температуры в комплекте с термопреобразователями сопротивления при температуре окружающего воздуха от 5 до 50°С и относительной влажности до 80% при температуре 25°С
Технические данные:
Сопротивление внешней соединительной линии равно 15 Ом.
Основная погрешность логометра на всех отметках шкалы не превышает ±1,5% от диапазона измерений".
Вариация показаний логометра не превышает абсолютного значения допускаемой основной погрешности.
Номинальное напряжение питания логометра 4В постоянного тока.
При отклонении питания или при разрыве цепи питания указатель логометра выводится за начальную отметку шкалы (влево).
Электрическое сопротивление изоляции измерительной цепи логометра относительно корпуса при нормальных условиях температуры и влажности не менее 100 МОм.
Изоляция между измерительной цепью и корпусом логометра выдерживает испытательное напряжение 0,5 кВ.
Устройство и работа логометра.
Механизм приборов для измерения отношения сил двух электрических токов. Принцип действия Логометр основан на том, что направленные встречно вращающие моменты, возникающие вследствие воздействия на подвижную часть Логометр величин, входящих в измеряемое отношение, уравновешиваются при отклонении подвижной части на некоторый угол.
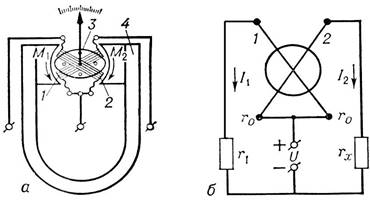
Устройство магнитоэлектрического логометра (а) и схема омметра с магнитоэлектрическим логометром (б): M1, M2 — вращающие моменты; l1, I2 — токи в цепях омметра; U — источник питания; r0 — сопротивление рамок логометра; r1 — омическое сопротивление; rx — измеряемое сопротивление; 1, 2 — рамки логометра; 3 — сердечник; 4 — постоянный магнит.
Например, подвижную часть магнитоэлектрического логометр образуют две скрепленные под углом рамки, токи к которым подводятся через безмоментные спирали (рис., а). Находясь в поле постоянного магнита, рамки стремятся повернуться в направлении действия большего момента, и подвижная часть отклоняется до тех пор, пока моменты не уравновесятся. Логометр широко применяются в различных схемах для измерения электрических величин: ёмкости, индуктивности, сопротивления. Например, при использовании Логометр в омметре (рис., б) угол a, на который отклоняется подвижная часть Логометр, зависит только от отношения сил токов I1 и I2;
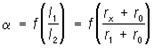
т. e. при постоянных r0 и r1 отклонение подвижной части пропорционально измеряемому сопротивлению; шкала Логометр градуируется непосредственно в омах (ом). Широко распространены также Логометр электродинамических и ферродинамических систем.
В двухрамочном измерительном механизме, который называют логометром, нет противодействующих пружин, вращающий и противодействующий моменты создаются электромагнитными силами. Поэтому при отсутствии тока в обмотках хорошо уравновешенная подвижная часть прибора находится в безразличном равновесии (стрелка останавливается у любого деления шкалы). Когда в катушках есть ток, на подвижную часть действуют два электромагнитных момента, направленные в противоположные стороны.
3 Механические и гидростатические уровнемеры
Уровнемер- прибор для промышленного измерения или контроля уровня жидкости и сыпучих веществ в резервуарах, хранилищах, технологических аппаратах и т.п. В зависимости от места установки различают уровнемер -указатели (для непрерывного измерения) и уровнемер - сигнализаторы (для дискретного контроля одного или нескольких фиксированных положений уровня). Уровнемер служат уровня датчиками в автоматических системах управления и регулирования технологических процессов.
По принципу действия уровнемер для жидкостей разделяются на механические, гидростатические, электрические, акустические, радиоактивные. Простейший уровнемер – водомерное стекло, в котором использован принцип сообщающихся сосудов, служит для непосредственного наблюдения за уровнем жидкости в закрытом сосуде.
Механические уровнемер бывают поплавковые, с чувствительным элементом (поплавком), плавающим на поверхности жидкости, и буйковые, действие которых основано на измерении выталкивающей силы, действующей на буёк. Перемещение поплавка или буйка через механические связи или систему дистанционной (электрической или пневматической) передачи сообщается измерительной системе прибора.
Измерение уровня гидростатическими уровнемер основано на уравновешивании давления столба жидкости в резервуаре давлением столба жидкости, заполняющей измерительный прибор, или реакцией пружинного механизма прибора.
Простейшие уровнемер для сыпучих веществ выполняются с чувствительными элементами в виде пластин, соприкасающихся с поверхностью вещества. Изменение уровня дистанционно передаётся на вторичный измерительный прибор. Для измерения уровня сыпучих веществ, применяют механические , гидростатические, а так же электрические, ёмкостные и радиоактивные уровнемеры.
Гидростатические уровнемеры.
Принцип действия гидростатических уровнемеров основан на измерении давления столба жидкости, высота которого равна высоте уровня жидкости в сосуде. Гидростатическое давление при этом измеряется либо с помощью двух манометров (Mt, Ж2 ), либо одним дифференциальным манометром (ДМ).
Измерение гидростатического давления может осуществляться различными способами, например:
- манометром или датчиком давления, которые подключаются к резервуару на высоте, равной нижнему предельному значению уровня;
- дифференциальным манометром, который подключается к резервуару на высоте, равной нижнему предельному значению уровня, и к газовому пространству над жидкостью;
- измерением давления воздуха, прокачиваемого по трубке, опущенной в жидкость на фиксированное расстояние, и другими.
При измерении уровня гидростатическим способом погрешности измерения определяются классом точности измерительного прибора, изменениями плотности жидкости и колебаниями атмосферного давления.
Если резервуар находится под избыточным давлением, то к гидростатическому давлению жидкости добавляется избыточное давление над ее поверхностью, которое данной измерительной схемой не учитывается. Поэтому такая схема измерения для таких случаев не подходит.
В связи с этим, более универсальными являются схемы измерения уровня с использованием дифференциальных датчиков давления (дифманометров). С помощью дифференциальных датчиков давления можно также измерять уровень жидкости в открытых резервуарах, контролировать границу раздела жидкостей.
Механические уровнемеры
К этим уровнемерам относятся поплавковые, буйковые и гидростатические уровнемеры. Все они реализуют абсолютный метод измерения уровня, основанный на использовании различия плотностей веществ, образующих границу раздела. Принципиальная схема поплавкового уровнемера представлена на рис. 129. В качестве первичного преобразователя уровнемера используется тело (поплавок) обычно шарообразной или цилиндрической формы, плавающее на поверхности жидкости и имеющее постоянную с5садку (/). Поплавок под действием выталкивающей („Архимедовой") силы перемещается вместе с уровнем жидкости. Положение поплавка, являющееся мерой текущего значения уровня жидкости, фиксируется вторичным преобразователем и преобразуется в электрический, пневматический, частотный сигнал и (или) отсчитывается по шкале показывающего прибора. Связь поплавка со вторичным преобразователем может осуществляться с помощью механических элементов (троса, ленты, рычага) или с помощью бесконтактных (оптических, акустических, радиоизотопных и др.) следящих систем.
Характерная особенность поплавковых уровнемеров с механической связью — необходимость герметизации вывода при измерении уровня токсичных, легкоиспаряющихся жидкостей, в сосудах с избыточным давлением, а также наличие дополнительных погрешностей, связанных с упругой деформацией и трением элементов связи.
В то же время использование для фиксации положения поплавка бесконтактных следящих систем усложняет конструкцию уровнемеров, обусловливает, как правило, нелинейность их характеристик преобразования.
При тщательной градуировке и правильной эксплуатации поплавковых расходомеров их основная погрешность может быть сведена к значению порядка ±1 мм в диапазоне измерений до 15—20 м. Вследствие этого поплавковые уровнемеры находят применение в качестве образцовых.
Наиболее существенное влияние на точность измерения уровня поплавковыми расходомерами оказывает изменение температуры в рабочей полости сосуда. Изменения температуры обусловливают температурную деформацию поплавка, изменения плотностей жидкости и газа з над-
жидкостной полости, что, в конечном счете, приводит к изменению Д/ осадки поплавка. Так, если температурные изменения плотностей жидкости (рж) и газа (рг) составят соответственно Држ, Дрг, то абсолютная дополнительная погрешность уровнемера, связанная с изменением осадки поплавка
Д/ =Лрж + Лрг
при условии постоянства площади сечения поплавка или столь малых значений Ы, при которых эту площадь можно считать постоянной.
Принципиальная схема буйкового уровнемера приведена на рис. Чувствительный элемент уровнемера — буй представляет собой массивное тело (как правило, осесимметричное), подвешенное вертикально внутри сосуда, в котором измеряется уровень жидкости. При изменении Дй уровня жидкости меняется степень погружения буя, а следовательно, и действующая на него выталкивающая сила. Изменение выталкивающей силы компенсируется деформацией {fix) упругого элемента (пружины, мембраны, торсионной трубки), которая и является мерой изменения уровня жидкости в сосуде.
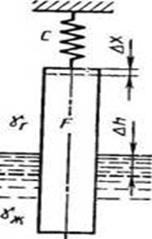
Рис. Принципиальная схема буйкового уровнемера
Деформация упругого элемента вторичным преобразователем преобразуется в пропорциональный электрический, пневматический или частотный сигнал.
Особенность буйковых уровнемеров — наличие начального (неконтролируемого) уровня, от которого ведется отсчет показаний. Размер начального уровня составляет обычно 4—10 мм. Он необходим для устранения влияния сил поверхностного натяжения, которое максимально в момент касания (или отрыва) буя поверхности жидкости. С этой же целью используют специальные покрытия, уменьшающие налипание жидкости на поверхности буя.
4 Индукционные (электромагнитные) расходометры
Расходоме́р - прибор для определения расхода газа, жидкости или сыпучих материалов. Существует большое число различных по принципам действия и конструктивному оформлению приборов для измерения. Классификация их точно не определена и у разных авторов различна. Так, некоторые специалисты выделяют до 16 типов расходомеров. Мы рассмотрим только некоторые приборы, получившие в настоящее время наибольшее распространение, а именно: расходомера индукционного (электромагнитного) типа.
Электромагнитные расходомеры.
Электромагнитные (индукционные) расходомеры предназначены для измерения расхода различных жидких сред, в том числе пульп с мелкодисперсными неферромагнитными частицами, с электрической проводимостью не ниже 5-10 См/м, протекающих в закрытых полностью заполненных трубопроводах. Широко применяются в различных отраслях пищевой промышленности.
Электромагнитные расходомеры выполняются в виде двух отдельных блоков: измерительного преобразователя расхода и измерительного блока — передающего преобразователя, в котором осуществляется приведение сигнала, полученного от измерительного преобразователя, к стандартизованному виду, удобному для дальнейшего использования.
Принцип действия
индукционного расходометра основан на явлении электромагнитной индукции. При прохождении электропроводящей жидкости (в том числе и водопроводной воды) через однородное магнитное поле в ней, как в движущемся проводнике, возникает электродвижущая сила, пропорциональная средней скорости потока.
Индукционный расходометр имеет в своей конструкции электромагнит, полюса которого прикрепляются по обе стороны трубопровода. Напряжение, возникающее в жидкости, снимается электродами, располагаемыми перпендикулярно внешнему магнитному полю, и подается на измерительный прибор. Связь между напряжением и расходом воды устанавливается заводской тарировкой расходомера.
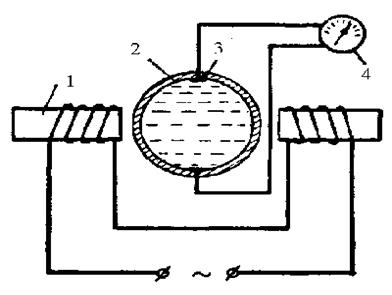
Схема индукционного расходометра. 1 - магнитопровод; 2 - трубопровод; 3 - электроды; 4 - измерительный прибор.
Индукционные расходометры имеют ряд достоинств:
результаты измерения не зависят от распределения скоростей в сечении;
отсутствуют дополнительные гидравлические потери в трубопроводе;
возможность применения для измерения загрязненной жидкости.
Выпускаемые отечественной промышленностью
индукционные расходометры ИР-1 и ИР-1М позволяют измерять расходы в трубопроводах диаметром до 0,3 м с точностью до 0,5 %.
Список литературы
1. Лукас В. А. ТАУ. -М.: Недра, 1990, 416 с.
2. Юревич Е. И. ТАУ. Энергия, Ленинград, 1975, 416 с.
3. ТАУ. Под ред. Воронова А. А. ч.1. -М.: Высш. шк., 1986, 367 с.
4. Ван Трис Г. Теория обнаружения, оценок и модуляции. Том 1. Пер с англ. под ред. Проф. Тихонова В. И. -М.: Сов. Радио, 1972, 744 с.
5. Клюев А. С. Автоматическое регулирование. М., Энергия, 1973.
6. Иванов А. А. ТАУР. М., Недра, 1970, 352 с.
7. ТАУ. Ред. Нетушил А. В. М., Высш. шк., 1976, 400 с.
8. Петров И. К. Технологические измерения и приборы в пищевой промышленности. М.: Пищ. пром-ть, 1985. 343с.
9. Сосин О.М. Основы автоматизации технологических процессов и производства. М.: Издательский центр «Академия»,2007. 240с.
|
