Федеральное агентство по образованию (Рособразование)
Архангельский государственный технический университет
Кафедра электротехники
Новиков Роман Иванович
Факультет ПЭ курс IVгруппа 7 d
КУРСОВОЙ ПРОЕКТ
По дисциплине электропривод
На тему
Проектирование электропривода лифтовой установки
Руководитель проекта преподаватель
Баланцев Г. А
Архангельск 2008г.
Федеральное агентство по образованию (Рособразование)
Архангельский государственный технический университет
Кафедра электротехники
ЗАДАНИЕ НА КУРСОВОЙ ПРОЕКТ
по электроприводу
студенту ПЭ 1 факультета IV 1 курса 7 1 группы
Новиков Роман Иванович
ТЕМА: Проектирование электропривода лифтовой установки
ИСХОДНЫЕ ДАННЫЕ:
типовая загрузка лифта bт
= 0,6;
суммарное время срабатывания аппаратуры to
= 0,3 с;
грузоподъёмность 1100 кг;
масса кабины 1700 кг;
скорость nн
= 1,00 м/с;
диаметр шкива Dш
= 950 мм;
параметры редуктора:
передаточное число iр
= 45;
прямой кпд hр.п
= 0,70;
обратный кпд hр.с
= 0,60.
Срок проектирования с « » 12008 г. по « » 12008 г.
Руководитель проекта преподаватель Баланцев Г. А.
Введение
Лифты нашли широкое применение в различных сферах жизнедеятельности человека, поэтому существует объяснимая потребность в разработке и проектировании надежных и безопасных электроприводов лифтовых установок.
Лифтовые установки являются типичным примером механизмов, предъявляющих высокие требования к динамическим характеристикам электропривода, работающего в напряженных пускотормозных режимах. Можно выделить основные требования к электроприводу лифтов:
надежность в работе, обеспечение безопасности при использовании лифтовой установки;
малошумность (для лифтов используют специальные электродвигатели, обеспечивающие пониженный уровень шума);
удобство и простота в эксплуатации и обслуживании;
ограничение ускорений кабины (по условиям комфортности для пассажирских лифтов и отсутствия проскальзывания каната относительно канатоведущего шкива для грузовых лифтов);
обеспечение плавных переходных процессов пуска и торможения при широких пределах изменения момента сопротивления;
наличие ревизионной пониженной скорости  для лифтов с основной рейсовой скоростью более для лифтов с основной рейсовой скоростью более  ; ;
обеспечение точности остановки кабины относительно уровня этажной площадки (10-20 мм для скоростных и больничных лифтов, 35-50 мм для остальных лифтов). Для лифтов с номинальной скоростью кабины не выше 1,4 м/с указанные ревизионная скорость и точность остановки реализуется путём создания механической характеристики электропривода лифта при пониженной скорости;
Реклама

лифтовая лебедка должна быть оборудована автоматически действующим тормозом нормально замкнутого типа.
Для лифтов используют электропривод переменного тока с односкоростным и двухскоростным короткозамкнутым асинхронным двигателем и электропривод постоянного тока с управляемыми тиристорными преобразователями (ТП) напряжения.
Для лифтов со скоростью движения до 0,5 м/с применяется простейшая схема электропривода с короткозамкнутым асинхронным двигателем. Ограничение ускорения в этом случае производиться путем преднамеренного увеличения момента инерции электропривода лифтовой лебёдки за счет применения специальных лифтовых двигателей с повышенным моментом инерции и дополнительных маховиков, устанавливаемых на валу двигателя.
При скорости кабины выше 0,5 м/с необходимо иметь дополнительную механическую характеристику, обеспечивающую возможность работы двигателя на пониженной скорости. Эта характеристика нужна для движения кабины с ревизионной скоростью и обеспечения требуемой точности остановки. Для лифтов со скоростью движения кабины не выше 1,4 м/с наиболее распространенным является электропривод с двухскоростным асинхронным двигателем и контакторным управлением. Ограничение ускорений в переходных процессах в этом случае производиться таким же образом, как и в предыдущем случае.
Использование двухскоростных асинхронных двигателей с независимыми обмотками, управляемых от ТП, позволяет увеличить скорость движения кабины до 2 м/с. Ограничение ускорений и рывков в такой системе электропривода осуществляется в одноконтурной замкнутой системе регулирования скорости путем формирования оптимальной тахограммы движения.
1 ОБОСНОВАНИЕ ВЫБОРА ОПТИМАЛЬНОГО ЗНАЧЕНИЯ И ОПРЕДЕЛЕНИЕ ВЕСА ПРОТИВОВЕСА
1.1 Определим вес противовеса без учёта веса тяговых канатов, Н
 , (1) , (1)
где Gк
и Gн
– вес кабины и номинальный вес груза, Н, определяемые величинами массы кабины и номинальной грузоподъемности соответственно, которые заданы в технических данных лифта, приведённых в таблице 1[1] приложения;
a - коэффициент, учитывающий, какая часть веса противовеса используется для уравновешивания груза.
Реклама

Коэффициент a определим по формуле:
 , (2) , (2)
где b - коэффициент загрузки лифта, 0,6;
hп
– коэффициент полезного действия (кпд) механизма при подъёме кабины, 0,7;
hс
– коэффициент полезного действия (кпд) механизма при спуске кабины, 0,6;
Вес кабины Gк
, Н, определим по формуле:
 , (3) , (3)
где g – ускорение свободного падения, м/с2
, 9,81;
mк
– масса кабины, кг, 1700;
 Н. Н.
Номинальный вес груза Gн
, Н, определим по формуле:
 , (4) , (4)
где mн
– грузоподъёмность, кг, 1100;
 Н. Н.
По формуле (1) определим вес противовеса без учёта веса тяговых канатов:
 Н. Н.
1.2 Определим требуемую мощность для подъёма пустой кабины, кВт
 , (5) , (5)
где vп
– скорость при подъёме кабины лифта, м/с, 1,00;
1000 – коэффициент для перевода мощности в киловатты;
 кВт. кВт.
1.3 Определим требуемую мощность для спуска пустой кабины, кВт
 , (6) , (6)
где vc
– скорость при спуске кабины лифта, м/с, 1,00;
 кВт. кВт.
1.4 Определим эквивалентную мощность двигателя за цикл, кВт
 , (7) , (7)
где tп
и tс
– время, затрачиваемое на подъём и спуск кабины лифта, с.
Принимая, что время подъёма равно времени спуска –  , тогда эквивалентная мощность двигателя за цикл определяется по выражению: , тогда эквивалентная мощность двигателя за цикл определяется по выражению:
 кВт. кВт.
Определим величину минимальной эквивалентной мощности двигателя:
 ; (8) ; (8)
 кВт. кВт.
2 определение мощности и выбор типа электродвигателя
В реальных условияхлифт работает в основном с нагрузкой меньше номинальной, которую называют типовой нагрузкой или типовой загрузкой bт
. Поэтому задача выбора оптимальных величин мощности двигателя и веса противовеса для работы лифта с переменной нагрузкой требует рассмотрения различных вариантов загрузки лифта. Рассмотрим два таких варианта.
Первый вариант. Выберем вес противовеса из оптимальных условий работы лифта с номинальной загрузкой (b =1) и определим требуемую мощность двигателя Рэ1
, а затем найдем эквивалентную мощность электропривода Рэ1т
при работе с выбранным противовесом в случае типовой нагрузки.
2.1 Для номинальной загрузки требуемую мощность двигателя определим по формуле, кВт
 ; (9) ; (9)
 кВт. кВт.
2.2 При работе лифта с типовой нагрузкой (b =bт
) двигатель, выбранный в соответствии с уравнением (9), будет загружен по тепловому режиму следующим образом
 ; (10) ; (10)
 кВт. кВт.
Второй вариант. Выберем противовес из оптимальных условий работы привода лифта при типовой нагрузке (b =bт
) и найдем требуемую мощность двигателя Рэ2
при работе с этим противовесом в случае номинальной нагрузки.
2.3 Мощность определим по формуле
 ; (11) ; (11)
 кВт. кВт.
2.4 Определим требуемую мощность привода при условии b =bт
по формуле
 ; (12) ; (12)
 кВт. кВт.
2.5 Отношение требуемых мощностей двигателя рассматриваемых вариантов определим по выражению
 ; (13) ; (13)
 . .
2.6 Отношение тепловых загрузок двигателя при работе электропривода лифта в режиме, соответствующем b =bт
определим по выражению
 ; (14) ; (14)
Выбор веса противовеса и расчет мощности двигателя целесообразно определять исходя из оптимальных условий работы лифта при типовой нагрузке. По таблице 3[1] выберем электродвигатель, мощность которого при номинальной частоте вращения будет выше расчетной. Принимаем двигатель АС2-92-6/24шл, технические данные которого сведены в таблицу 1.
Таблица 1 – Технические данные электродвигателя АС2-92-6/24шл
| мощность, кВт |
частота вращения, об/мин |
момент инерции, кг×м2
|
| номинальная |
минимальная |
ротора |
муфты |
предельно допустимый момент инерции привода лифта |
| 10 |
930 |
200 |
1,75 |
0,6 |
3,0 |
3 определение требуемого тормозного усилия и выбор тормозного устройства
Весьма важным элементом системы электропривода является механический тормоз. Тормоз должен удерживать кабину с грузом и обеспечивать точность остановок во всех режимах лифта с допустимым замедлением.
Определим необходимый тормозной момент
 , (15) , (15)
где kт
– коэффициент запаса тормозного момента;
Мн
– номинальный момент механизма привода лифта, Н×м.
Величину коэффициента запаса kт
для грузовых лифтов с проводником принимают равным 1,8. Номинальный момент Мн
определим по формуле:
 ; (16) ; (16)
 Н×м. Н×м.
По формуле (15) определим необходимый тормозной момент:
 Н×м. Н×м.
Из таблицы 4[1] выбираем электромагнитное тормозное устройство, максимальный тормозной момент которого при характерном для лифтов периоде включения ПВ = 25 % будет ниже расчетного. Принимаем электромагнитное тормозное устройство лифта МП-201, технические характеристики которого сведены в таблицу 2.
Таблица 2 – Технические характеристики тормозного устройства МП-201
| диаметр тормозного шкива, мм |
ход якоря, мм |
время, с |
период включения ПВ, % |
тяговое усилие, Н |
максимальный тормозной момент, Н×м |
| включения |
отключения |
| 200 |
4 |
0,4 |
0,15 |
25 |
960 |
103 |
| 40 |
780 |
85 |
| 100 |
320 |
65 |
4 определение точности остановки кабины лифта на заданном уровне
Одним из основных вопросов, решаемых при проектировании электропривода лифта, является определение точности остановки кабины на заданном уровне. Недостаточная точность остановки лифта снижает безопасность пользования им и его производительность.
4.1 Определим расчетное значение пути, которое проходит лифт с момента подачи команды на остановку
 , (17) , (17)
где S1
– путь проходимый лифтом за время срабатывания аппаратуры, отключающей двигатель, м;
S2
– путь, проходимый лифтом после наложения тормозов, м.
Путь S1
можно определить через скорость движения лифта nо
в период срабатывания отключающей аппаратуры и время срабатывания отключающей аппаратуры to
:
 . (18) . (18)
Скорость движения лифта определим по формуле:
 , (19) , (19)
где wн
– номинальная скорость лифта, об/мин;
wmin
– минимальная скорость лифта об/мин;
 м/с. м/с.
По формуле (18) определим путь проходимый лифтом за время срабатывания аппаратуры, отключающей двигатель:
 м. м.
Путь, проходимый лифтом после наложения тормозов, S2
определим по формуле:
 , (20) , (20)
где tт
– время торможения лифта с постоянной величиной замедления, с.
Время торможения лифта определим из выражения:
 , (21) , (21)
где J – суммарный момент инерции, приведенный к валу двигателя, кг×м2
;
Мс
– статический момент, Н×м.
В данном уравнении знак «плюс» соответствует подъёму груза и спуску пустой кабины, а знак «минус» - спуску груза и подъёму пустой кабины.
Момент инерции, приведённый к валу двигателя, J складывается из моментов инерции ротора двигателя Jр
и муфты Jм
, величины которых приведены в таблице 1, а также момента инерции поступательно движущихся элементов лифта Jп
:
 . (22) . (22)
Величина момента инерции поступательно движущихся элементов лифта Jп
, кг×м2
, определяется из выражения:
 , (23) , (23)
где Gд
– суммарный вес поступательно движущихся элементов лифта, Н.
При подъёме и спуске номинального груза суммарный вес поступательно движущихся элементов лифта определяется из выражения:
 ; (24) ; (24)
 Н. Н.
По формуле (23) определим момент инерции поступательно движущихся элементов лифта Jп
, кг×м2
:
 кг×м2
. кг×м2
.
По формуле (22) определим момент инерции, приведённый к валу двигателя:
 кг×м2
. кг×м2
.
При подъёме и спуске пустой кабины суммарный вес поступательно движущихся элементов лифта определяется из выражения:
 ; (25) ; (25)
 Н. Н.
По формуле (23) определим момент инерции поступательно движущихся элементов лифта Jп
, кг×м2
:
 кг×м2
. кг×м2
.
По формуле (22) определим момент инерции, приведённый к валу двигателя:
 кг×м2
. кг×м2
.
Статический момент Мс
, Н×м, определяется из выражений, соответствующих различным режимам работы:
- подъём номинального груза
 ; (26) ; (26)
- спуск номинального груза
 ; (27) ; (27)
- подъём пустой кабины (спуск противовеса)
 ; (28) ; (28)
- спуск пустой кабины (подъём противовеса)
 . (29) . (29)
По формуле (26) определим статический момент Мс
, Н×м, при подъёме номинального груза:
 Н×м. Н×м.
По формуле (21) определим время торможения лифта:
 с. с.
По формуле (20) определим путь, проходимый лифтом после наложения тормозов:
 м. м.
По формуле (17) определим путь, проходимый лифтом с момента подачи сигнала на остановку:
 м. м.
Аналогичным образом рассчитываются остальные режимы работы лифта. Результаты расчетов сведем в таблицу 3
Таблица 3 – Путь, проходимый лифтом с момента подачи сигнала на остановку
| Режим работы лифта |
Определяемые величины |
| Мс
, Н×м |
tт
, с |
S2
, м |
S, м |
| подъём номинального груза |
117,6 |
0,272 |
0,029 |
0,094 |
| спуск номинального груза |
49,4 |
0,241 |
0,026 |
0,090 |
| подъём пустой кабины (спуск противовеса) |
18,9 |
0,134 |
0,014 |
0,079 |
| спуск пустой кабины (подъём противовеса) |
45,1 |
0,069 |
0,007 |
0,072 |
4.2 Определим расстояние Sост
, м, до уровня пола, соответствующее моменту времени подачи сигнала на остановку лифта
 , (30) , (30)
где в качестве Sa
и Sb
используется такие два из четырёх рассчитанных значений пути S, при которых точность остановки лифта ds
имеет минимальное значение.
Точность остановки рассчитывается по формуле:
 . (31) . (31)
Для режима подъём номинального груза и спуск номинального груза точность остановки определяется по формуле:
 . .
Результаты остальных режимов сведем в таблицу 4.
Таблица 4 – Точность остановки
| режим |
результат |
| подъём номинального груза и спуск номинального груза |
0,002 |
| подъём номинального груза и подъём пустой кабины |
0,007 |
| подъём номинального груза и спуск пустой кабины |
0,011 |
| спуск номинального груза и подъём пустой кабины |
0,006 |
| спуск номинального груза и спуск пустой кабины |
0,009 |
| подъём пустой кабины и спуск пустой кабины |
0,004 |
Из полученных выражений видно, что точность остановки принимает минимальное значение при Sa
= 0,094 м и Sb
= 0,09 м.
По формуле (30) определим расстояние Sост
, м, до уровня пола, соответствующее моменту времени подачи сигнала на остановку лифта:
 м. м.
5 рекомендации по повышению точности остановки лифтов
Точность остановки зависит от величины пройденного пути лифтом с момента подачи команды, который, в свою очередь, складывается из двух величин – S1
и S2
. Путь S в процессе работы лифта не остается постоянной величиной. Он изменяется под влиянием различных возмущающих воздействий – отклонения от расчетных значений скорости, массы, тормозных усилий, времени срабатывания аппаратуры и т. д.
Изменение пути, проходимого кабиной лифта за время срабатывания аппаратуры, вызванное возмущениями скорости движения лифта Dnо
и времени срабатывания аппаратуры Dto
,
 , (32) , (32)
а изменение пути, проходимого кабиной лифта за время торможения, вызванное возмущениями скорости Dnо
, массы Dmo
и усилий DFo
.
 , (33) , (33)
где Fт
и Fс
– расчетное тормозное и статическое усилия, приведенные к скорости движения кабины, Н.
Максимальное отклонение пути остановки лифта, соответствующее случаю, когда возмущения вызывают приращения одного знака
 . (34) . (34)
Анализ приведенных уравнений позволяет дать рекомендации по уменьшению отклонения пути остановки лифта и, следовательно, по повышения точности его остановки.
Для повышения точности остановки следует стремиться к уменьшению времени срабатывания аппаратуры to
путем использования быстродействующих аппаратов и сокращения числа последовательно действующих элементов схемы.
Возможные значения статического усилия и приведенной массы установки полностью определяются конструктивными особенностями и режимом работы лифта. Статические нагрузки изменяются в широких пределах, что и является причиной разброса пути торможения и соответствующей неточности остановки.
Тормозное усилие Fт
для повышения точности остановки выбирается возможно большим. Возможность снижения неточности остановки за счет повышения усилия тормоза невелики вследствие необходимости ограничения максимального ускорения допустимым значением.
Увеличение массы является не желательным, так как влечет за собой увеличение динамических нагрузок двигателя и обусловленными ими потерь энергии.
Как видно из уравнений, от скорости движения лифта зависят как значение пути, проходимого кабиной лифта за время срабатывания аппаратуры, так и путь, проходимого кабиной лифта за время торможения. Поэтому уменьшение скорости лифта эффективно снижает и максимальную неточность остановки. Чем выше жесткость механической характеристики двигателя перед остановкой, более стабильна скорость привода nо
, тем точность остановки выше.
Таким образом, можно сделать вывод, что подбор необходимых значений Dnо
и  является единственно возможным способом, позволяющим обеспечить получение любой заданной точности остановки. является единственно возможным способом, позволяющим обеспечить получение любой заданной точности остановки.
6 основные схемы лифтовой установки
6.1 Структурная схема лифтовой установки
Все схемы управления содержат определенный набор устройств или модулей, каждый из которых предназначен для выполнения определенных функций. В общем случае структурную схему лифтовой установки можно представить в виде, показанном на рисунке 1.
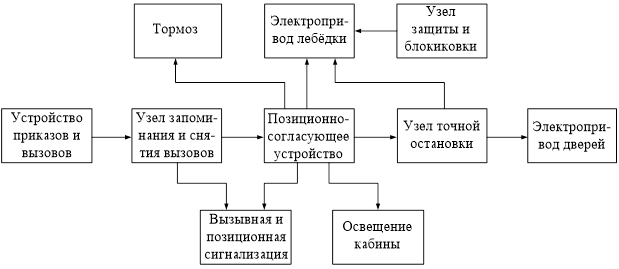
Рисунок 1 – Структурная схема лифтовой установки
В соответствии с этой схемой лифтовая установка работает следующим образом. Команда на начало движения подается с помощью устройства приказов и вызовов – кнопки управления, кнопочные посты и кнопочные панели.
Команды от устройства приказов и вызовов поступают в узел, который осуществляет запоминание и последующее снятие соответствующих команд после их выполнения.
Одним из наиболее сложных и наиболее ответственных узлов схемы управления лифтовой установки является позиционно-согласующее устройство (ПСУ), которое служит для определения положения кабины в шахте и выдачи сигналов для движения кабины в нужном направлении и её остановки.
Сигналами с выхода ПСУ осуществляется управление механическим тормозом с электромагнитным приводом и включение электропривода подъёмной лебёдки. Для обеспечения точной остановки кабины лифта предусмотрен узел точной остановки.
После остановки кабины автоматически включается электропривод дверей кабины и шахты. Узел защиты и блокировки обеспечивает безопасность работы лифта.
Схема управления лифта включает также устройства сигнализации и освещения кабины.
Позиционная световая сигнализация предназначена для извещения пассажиров и обслуживающего персонала о местонахождении кабины в данный момент.
6.2 Принципиальная схема управления лифтом
Принципиальная схема управления пассажирского лифта с двух скоростным асинхронным двигателем показана на формате А1.
Лифт работает следующим образом. Для вызова кабины нажимают кнопки вызова на соответствующем этаже. Кабина подходит к этому этажу, останавливается, и затем автоматически открываются двери шахты и кабины. Если кабина находилась на требуемом этаже, то после нажатия на кнопку вызова сразу открываются двери. Пассажиры входят в кабину и нажимают кнопку приказа нужного этажа. Двери закрываются, и кабина идет на требуемый этаж.
Для электропривода подъёмной лебедки лифта используется двухскоростной асинхронный двигатель с соотношением чисел пар полюсов 1:3. Остановка лебедки происходит при наложении механического тормоза с электромагнитным приводом YB.
Управление двигателем М1 подъёмной лебедки осуществляется с помощью контакторов направления КМ1, КМ2 и контакторов большой и малой скорости КМ3, КМ4. Катушка тормоза YB питается от сети переменного тока через однополупериодный выпрямитель и включается с помощью контакта реле движения КА3.
Для автоматического привода дверей шахты и кабины используется короткозамкнутый асинхронный двигатель М2, управление которым осуществляется с помощью реле закрытия и открытия дверей КА1, КА2.
Из кабины управляют кнопками приказа SB1-SB5; вызывают кабину кнопками вызова SB6-SB10; с крыши кабины лифтом управляют кнопками SB12 (вверх) и SB13 (вниз); из машинного помещения – кнопками SB14 (вверх), SB15 (вниз) и SB13 (стоп).
Выбор режима работы лифта осуществляют переключателем SA2 и соединителями Х2, Х3.
Приказы и вызовы регистрируются этажным реле КА6-КА10. Выбор направления движения кабины и подача команды на переход с большой скорости на малую осуществляется трехпозиционными этажными переключателями SQ1-SQ5, установленными в шахте на соответствующих этажах.
Кабина останавливается на уровне заданного этажа с помощью датчика точной остановки SQ6 и реле точной остановки.
Включение двигателя М2 при открытии дверей осуществляется с помощью реле КА2, а при их закрытии – с помощью реле КА1. Отключение этого двигателя осуществляется соответствующими конечными выключателями SQ7 и SQ8.отключение этого двигателя осуществляется соответствующими конечными выключателями SQ7 и SQ8. Реле открытия дверей КА2 включается после остановки кабины размыкающим контактом реле движения КА3 через контакты 3 и 4 соответствующих этажных переключателей. Реле закрытия дверей КА1 включается замыкающими контактами этажных реле КА6-КА10 или размыкающим контактом реле времени КТ1. Автоматическое закрытие дверей осуществляется последовательным действием реле времени КТ2 и КТ1. Безопасность пассажиров при выходе из кабины и входе обеспечивается за счет особой конструкции привода дверей с блокировочным переключателем SQ9.
В цепь защиты лифта включены следующие элементы: кнопки «Стоп» SB11 и SB16, расположенные соответственно в кабине и в машинном помещении; контакт конечного выключателя SQ10, размыкающийся при подъёме и спуске кабины за установленные пределы; выключатель S1, предназначенный для защиты от ослабления или обрыва тросов ограничителя скорости; выключатель SA1, размыкающий цепь управления при проведении ремонтных работ в приямке шахты; контакт S2 ловителя; контакт S3, осуществляющий защиту при обрыве или ослабления натяжения подъемных канатов; выключатель SQ11 дверей кабины; выключатели SQ17-SQ21 дверей шахты; контакты SQ12.1-SQ16.2 замков шахтных дверей.
При замыкании всех контактов дверей и замков дверей включается реле контроля дверей КА4.
С помощью размыкающего контакта КТ1 в цепи кнопок вызова исключается возможность вызова кабины на другой этаж в течение 14 с – с момента полного открывания дверей или в течении 7 с – с момента закрытия дверей. Размыкающий контакт КТ3 в цепи реле КА2 исключает открытия дверей с момента начала движения лифта. Также в схеме предусмотрена блокировка, обеспечивающая питание контакторов КМ1 и КМ2 при переходе с большой скорости на малую скорость, путем включения замыкающего контакта КТ3 в цепь катушек этих контакторов.
В схеме предусмотрена вызывная сигнализация с помощью ламп HL3-HL7, установленных на соответствующих этажах и лампы HL2, установленной в машинном помещении. Лампа HL1 обеспечивает основное освещение кабины. Лампы аварийного освещения кабины HL8 и HL9 включены постоянно.
Для вызова обслуживающего персонала служат кнопка SB17, установленная в кабине, и звонок НА, находящейся в помещении дежурного по лифту.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. Электропривод лифтовой установки: методические указания к выполнению курсового проекта / сост.: А.В. Ушаков, Н.С. Кабеева. – Архангельск: Изд-во АГТУ, 2006. – 30 c.
2. Электротехнический справочник. В 3 т. Т. 3: В 2 кн. Кн 2. Использование электрической энергии / Под общ. ред. профессоров МЭИ: И. Н. Орлова (гл. ред.) и др. – 7-е изд., испр. и доп. – М.: Энергоатомиздат, 1988. – 616 с.: ил.
3. Ключев В. И., Терехов В. М. Электропривод и автоматизация общепромышленных механизмов: Учебник для вузов. – М.: Энергия, 1980. – 360 с., ил.
|
