1. Описание механизма
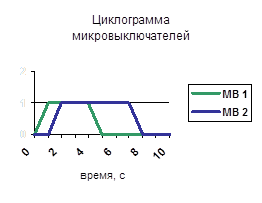
Программный механизм относится к системам автоматического управления. В основе систем лежит использование механизмов, осуществляющих замыкание и размыкание контактов с разными уже заданными выдержками времени и в заданной последовательности, которая заранее устанавливается программой. В данных механизмах применяется электромеханический способ осуществления требуемой выдержки времени срабатывания контактов.
В соответствии с заданием программный механизм представляет собой четырёхступенчатый редуктор. Привод механизма осуществляется электродвигателем серии ДПМ-20 переменного тока, широко применяющегося в системах автоматики.
В данном курсовом проекте программный механизм приводится в действие от электродвигателя постоянного тока серии ДПМ (тип двигателя из условия ДПМ-20).
Распределение передаточных отношений производится с учетом получения минимальных погрешностей. По использованной литературе можно отметить, что погрешность передачи будет тем меньше, чем меньше число ступеней в передаче.
Механизм собран в сборочном корпусе. В механизме установлены подшипники.
В механизме применена, ввиду средних скоростей вращения, смазка трущихся частей жидким индустриальным маслом с периодичностью замены 2 раза в год.
2. Кинематический расчет редуктора
Расчёт редуктора по условию минимизации погрешностей.
Общее передаточное число Ip
зубчатого механизма определяется по формуле:

где Vдв
, Vвых
– скорость вращения вала двигателя и выходного вала соответственно, об/мин,
Число ступеней n рассчитывается по формуле:

Если принять за число ступеней ближайшее число 3, то получим значения передаточных отношений ступеней больше рекомендуемого значения, т.е. i=8. Поэтому примем n=4
Для уменьшения погрешности редуктора можно принять передаточное отношение первых n-1 (трёх) ступеней одинаковым и равным 5 (пяти) по величине. Тогда передаточное отношение последней ступени будет равно:
Таким образом, для рассматриваемого случая проектирования редуктора имеем: i1
=i2
=i3
=5; i4
=6
3. Расчет геометрических размеров
Выбираем модуль m=0,5 мм.
Обычно в малогабаритных и малонагруженных зубчатых передачах задаются числом зубьев шестерён Z=17–28, с учетом минимальных габаритов и массы выбираем число зубьев шестерни удобное для расчётов и равное Z1
=20.
Число зубьев ведомого колеса определяется по формуле

принимаем 
Делительный диаметр шестерни
 мм мм
Делительный диаметр колеса
 мм мм
Диаметр выступов
 мм мм
 мм мм
Диаметр окружности впадин
 мм мм
 мм мм
Высота делительной головки зуба
 мм мм
где, h*
=1, – коэффициент головки зуба.
Коэффициент ножки зуба с*
=0,4, при m свыше 0,1 до 0,5 мм.
Высота делительной ножки зуба
 мм мм
Межосевое расстояние
Реклама

 мм мм
Учитывая то, что первые три ступени имеют одинаковое передаточное отношение, имеем:
Число зубьев


Делительный диаметр
 мм мм
 мм мм
Диаметр выступов
 мм мм
 мм мм
Диаметр окружности впадин
 мм мм
 мм мм
Межосевое расстояние
 мм мм
Выбираем число зубьев шестерни последней ступени равное Z7
=20.
Число зубьев ведомого колеса последней ступени определяется по формуле

принимаем 
Делительный диаметр шестерни
 мм мм
Делительный диаметр колеса
 мм мм
Диаметр выступов
 мм мм
 мм мм
Диаметр окружности впадин
 мм мм
 мм мм
Межосевое расстояние
 мм мм
4. Обоснованный выбор материалов
В качестве материала корпусных деталей используется литейный алюминиевый сплав силумин АЛ2 ГОСТ 2695–75, имеющий малый удельный вес и хорошие литейные свойства.
Для изготовления болтов и винтов, ввиду небольших нагрузок на них, выбираем углеродистую обыкновенного использования сталь Ст3.
В качестве смазочного материала выбираем ЦИАТИМ-201 ГОСТ 6267–74.
Для прокладок между корпусом и подшипниковыми крышками применяем маслобензостойкую резину для препятствия вытекания смазки.
Литература
1. Красковский Е.Я., Дружинин Ю.А., Филатов Е.М. Расчёт и конструирование механизмов приборов и вычислительных систем. – М.: Высшая школа, 1991, -429 с.
2. Методическое пособие для курсового проектирования по курсам «Механизмы устройств ЭВМ» и «Прикладная механика» /Петренко В.В., Назаренко В.Г., Рудковский Ч.Г., Хранцкевич В.В. – Мн.: МРТИ, 1991. –56 с.
3. Левин И.Я. Справочник конструктора точных приборов. – М.: Машиностроение, 1967, -743 с.
4. Элементы приборных устройств. / Под ред. Тищенко О.Ф. Часть I. – М.: Высшая школа, 1978. –328 с.
5. Справочник конструктора-приборостроителя. Проектирование. Основные нормы /Соломахо В.Л., Томилин Р.И., Цитович Б.В., Юдович Л.Г. – Мн.: Высшая школа, 1988, -287 с.
6. Анурьев В.И. Справочник конструктора-машиностроителя. В 3-х т., т. 3 – М: Машиностроение, 1980, -557 с.
7. Микродвигатели. Справочное пособие по курсу «Механизмы устройств вычислительных систем». – Мн.: МРТИ, 1986. -65 с.
8. Механика промышленных роботов. В 3-х кн./ Под ред. К.В. Фролова, Е.И. Воробьёва. – М.: Высшая школа, 1989.
|
