МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
АЛТАЙСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Им. И.И. ПОЛЗУНОВА
Кафедра «Системы автоматизированного проектирования»
Работа защищена__________ (дата)
С оценкой _______________
(подпись руководителя)
Параметризация компоновок чертежей многоступенчатых редукторов
Пояснительная записка к курсовой работе
по дисциплине «Автоматизация конструкторско-технологического проектирования»
обозначение документа
Проект выполнила
студентка гр. САПР-63 __ _______Ю.Б. Казакова__
подпись, и.о. фамилия
Нормоконтролер _________Ломских Н.В.
подпись, должность, и.о. фамилия
Барнаул 2010
Содержание
Введение
1 Параметризация чертежей
1.1 Основные понятия и типы параметризации
1.2 Программные средства параметризации
1.3 Характеристика возможностей использованной CAD-системы
2 Выбор типа и параметров многоступенчатого редуктора
2.1 Характеристика редукторов
2.2 Цилиндрический редуктор
3 Построение компоновки цилиндрического двухступенчатого редуктора
3.1 Проектный расчет валов
3.1.1 Ведущий вал
3.1.2 Промежуточный вал
3.1.3 Тихоходный вал
3.2 Конструирование зубчатых колес
3.3 Первый этап компоновки редуктора
3.4 Подбор муфты
3.5 Конструирование корпусных деталей и крышек
3.6 Эскизы стандартных деталей
Заключение
Список литературы
Приложение 1 Параметры элементов компоновки
Приложение 2 Спецификации
Приложение 3 Чертеж редуктора
Введение
В современных условиях при выборе САПР пользователи все чаще обращают внимание на возможности, предоставляемые системой в области параметризации.
Требования, предъявляемые к современным системам автоматизированного проектирования, не ограничиваются удобством создания графических примитивов и оформления чертежей по ГОСТ — на повестке дня появляются возможности систем в области построения ассоциативных моделей и сборок, оценивается степень простоты создания собственных параметрических библиотек, позволяющих аккумулировать накопленный опыт и в полной мере использовать имеющиеся на предприятии наработки. Сегодня проектирование на основе существующих заготовок (проектирование на основе баз знаний) дает возможность значительно сократить время выполнения проекта и количество ошибок, что часто играет решающую роль в условиях жесткой конкуренции.
Реклама

Важнейших функциональных средств современных конструкторских САПР является инструментарий, обеспечивающий эффективное внесение изменений в файлы описаний существующих чертежей, то есть их редактирование и модификацию.
1 Параметризация чертежей
1.1 Основные понятия и типы параметризации
Параметризация — это моделирование с использованием параметров элементов модели и соотношений между этими параметрами. Параметризация позволяет за короткое время «проиграть» (с помощью изменения параметров или геометрических отношений) различные конструктивные схемы и избежать принципиальных ошибок.Параметрическое моделирование существенно отличается от обычного двухмерного черчения или трёхмерного моделирования. Конструктор, в случае параметрического проектирования, создаёт математическую модель объектов с параметрами, при изменении которых происходят изменения конфигурации детали, взаимные перемещения деталей в сборке и т. п.
Параметризация двухмерных чертежей обычно доступна в CAD-системах среднего и тяжёлого классов.
Параметризация делится на три типа: иерархическую, вариационную и геометрическую параметризации.
Иерархическая параметризация (параметризация на основе истории построений) заключается в том, что в ходе построения модели вся последовательность построения отображается в отдельном окне в виде «дерева построения». В нем перечислены все существующие в модели вспомогательные элементы, эскизы и выполненные операции в порядке их создания.
Параметризация на основе истории построений присутствует во всех САПР использующих трёхмерное твердотельное параметрическое моделирование. Обычно такой тип параметрического моделирования сочетается с вариационной и/или геометрической параметризацией.
Вариационная или размерная параметризация основана на построении эскизов (с наложением на объекты эскиза различных параметрических связей) и наложении пользователем ограничений в виде системы уравнений, определяющих зависимости между параметрами.
В случае необходимости создания сборки, взаимное положение компонентов сборки задаётся путём указания сопряжений между ними (совпадение, параллельность или перпендикулярность граней и рёбер, расположение объектов на расстоянии или под углом друг к другу и т. п.).
Вариационная параметризация позволяет легко изменять форму эскиза или величину параметров операций, что позволяет удобно модифицировать трёхмерную модель.
Реклама

Геометрической параметризацией называется параметрическое моделирование, при котором геометрия каждого параметрического объекта пересчитывается в зависимости от положения родительских объектов, его параметров и переменных.
Параметрическая модель, в случае геометрической параметризации, состоит из элементов построения и элементов изображения. Элементы построения (конструкторские линии) задают параметрические связи. К элементам изображения относятся линии изображения (которыми обводятся конструкторские линии), а также элементы оформления (размеры, надписи, штриховки и т. п.).
Геометрическая параметризация даёт возможность более гибкого редактирования модели. В случае необходимости внесения незапланированного изменения в геометрию модели не обязательно удалять исходные линии построения (это может привести к потере ассоциативных взаимосвязей между элементами модели), можно провести новую линию построения и перенести на неё линию изображения.
1.2 Программные средства параметризации
CAD-системы (сomputer-aided design - компьютерная поддержка проектирования) предназначены для решения конструкторских задач и оформления конструкторской документации (более привычно они именуются системами автоматизированного проектирования САПР). Как правило, в современные CAD-системы входят модули моделирования трехмерной объемной конструкции (детали) и оформления чертежей и текстовой конструкторской документации (спецификаций, ведомостей и т.д.). Ведущие трехмерные CAD-системы позволяют реализовать идею сквозного цикла подготовки и производства сложных промышленных изделий. Все они в той или иной степени поддерживают принципы параметризации 2D и 3D-моделей.
В настоящее время в мире разработано огромное количество различных CAD-пакетов. Рассмотрим некоторые из них.
T-FLEX CAD
Система параметрического проектирования и черчения T-FLEX CAD является разработкой российской фирмы "Топ Системы". Система обладает следующими основными возможностями: параметрическое проектирование и моделировании; проектирование сборок и выполнение сборочных чертежей; полный набор функций создания и редактирования чертежей; пространственное моделирование, базирующееся на технологии ACIS; параметрическое трёхмерное твёрдотельное моделирование; управление чертежами; подготовка данных для систем с ЧПУ; имитация движения конструкции.
КОМПАС 3D
Один из лидирующих российских продуктов. CAD-система, предназначенная для широкого спектра проектно-конструкторских работ, лёгкая в освоении, удобная в работе и при этом имеющая стоимость, приемлемую для комплексного оснащения российских предприятий, в том числе средних и малых. Позволяет осуществлять двумерное проектирование и конструирование, быструю подготовку и выпуск разнообразной чертёжно-конструкторской документации, создание технических текстово-графических документов.
AutoCAD
2- и 3-мерная система автоматизированного проектирования и черчения, разработанная компанией Autodesk. AutoCAD является наиболее распространённой САПР в мире благодаря средствам черчения.
THINK3
Система автоматизированного проектирования для машиностроения среднего уровня. Обеспечивает двумерное проектирование, трёхмерное поверхностное и твердо-тельное моделирование, проектирование изделий из листовых материалов, ассоциативность двумерного чертежа с трёхмерной моделью, фотореалистичное представление проекта.
1.3 Характеристика возможностей использованной CAD-системы
В своей работе я использую CAD-систему Компас-3DV11. Мы часто сталкиваемся с задачей создания чертежа или модели на основе уже существующего, когда детали не очень различаются, но перерисовывать необходимо все заново. Для решения этой проблемы в системе КОМПАС-3D имеются средства параметризации, посредством которых можно задать определенные связи между отдельными элементами графического компонента, позволяющие при последующей разработке типовых конструкций не переделывать всю модель (чертеж), а изменить лишь несколько параметров. Это дает возможность многократно использовать единожды построенную модель, значительно сокращает время на формирование новых ее модификаций и т.п.
Существует два типа параметризации трехмерной модели в KОMПAC-3D – вариационная и иерархическая, сочетание которых позволяет широко варьировать параметры создаваемой модели, не изменяя ее топологию.
Вариационная параметризация имеет два проявления: параметризация графических объектов в эскизе и сопряжение между собой компонентов сборки.
Иерархические параметрические связи возникают автоматически по мере выполнения команд создания элементов модели.
Кроме этого для Компас-3D создана богатая база данных стандартных элементов редукторов, что позволяет создавать чертежи компоновок редукторов, пользуясь стандартными элементами (зубчатые колеса, валы, болты, подшипники).
2 Выбор типа и параметров многоступенчатого редуктора
2.1 Характеристика редукторов
Редуктор – это механизм, у которого одна или несколько передач: механических или гидравлических. Основное назначение редукторов – уменьшение частоты вращения и увеличение крутящего момента.
В зависимости от преследуемых целей, а так же от характеристик, которые необходимо обеспечить на выходе, используются различные типы редукторов, которые отличаются конструктивно.
Можно выделить три больших класса редукторов: цилиндрические, червячные и конические. Особенность конических, а так же цилиндрических разработок, заключается в том, что оси валов обычно располагаются в горизонтальной плоскости. Червячный же редуктор, в свою очередь допускает различное положение выходного вала.
В зависимости от плоскости расположения входных и выходных валов различают цилиндрические горизонтальные и вертикальные редукторы.
Червячные же двухступенчатые редукторы так же обеспечивают параллельность осей валов, однако в этом случае они расположены в разных плоскостях. При необходимости обеспечить угол 90 градусов между валами можно использовать червячный одноступенчатый редуктор.
Для того, что бы обеспечить расположение входного и выходного валов в одной плоскости, но под тем же перпендикулярным углом можно воспользоваться коническо-цилиндрическим редуктором. Так же следует иметь в виду, что цилиндрические редукторы более эффективны и долговечны.
Кроме того, в пределах каждого из классов выделяются подклассы, которые определяются исходя из конструктивных особенностей редуктора.
Выделяют одноступенчатые, двухступенчатые и многоступенчатые редукторы, которые используются для достижения различных результатов.
Основное правило заключается в том, что чем больше ступеней, тем соответственно большее передаточное число такое редуктор может обеспечить. Это связано с технологическими особенностями и соображениями практичности. Кроме того, использование многоступенчатой конструкции позволяет более рационально организовать работу такого элемента, как редуктор.
Редуктор - это продукт технический, а потому у него есть определенная функция, которую он выполняет в аппарате. Главной задачей редуктора является изменение скорости вращательного движения при его передаче
Бывает три типа редукторов: зубчатые, червячные и гидравлические. Чаще всего редуктор можно встретить в машинах, но кроме того он может использоваться во множестве других механизмов и аппаратов, в которых требуется заменять исходную степень прокрутки механизма.
2.2 Цилиндрический редуктор
В моей курсовой работе в Компас-3D создана компоновка двухступенчатого цилиндрического редуктора.
Цилиндрический редуктор - это одна из самых популярных разновидностей редукторов. Он, как и все редукторы, служит для изменения скорости вращения при передачи вращательного движения от одного вала к другому.
Именно редукторный привод один из наиболее распространенных видов приводов современных механических систем общепромышленного применения. Более ста лет назад перед нашей промышленностью стояла задача обеспечить нужды страны в цилиндрических редукторах. С этим успешно справлялись открывающиеся заводы. В настоящее время выпуск качественной и надежной продукции обеспечивается мощной производственной базой. Сейчас производят различные типы продукцией: цилиндрический редуктор одно-, двух-, и трехступенчатый.
От работоспособности и ресурса цилиндрического редуктора во многом зависит обеспечение требуемых функциональных параметров и надежности машины в целом. Показатели долговечности и надежности элементов привода и, в частности, редукторов и мотор-редукторов, зависят от обоснованного выбора самого редуктора при проектировании машины, т.е. соответствия этого выбора действующей нормативной документации (НД).
3. Построение компоновки цилиндрического двухступенчатого редуктора
Задачей курсовой работы является построение и параметризация компоновочного чертежа многоступенчатого редуктора, поэтому кинематические расчеты производиться не будут и за основу взята модель ранее спроектированного редуктора. Производятся расчеты только геометрических параметров редуктора.
3.1 Проектный расчет валов
Средние диаметры валов определяются по формуле

где Т – крутящий момент на валу (Нм)
 - пониженное допускаемое напряжение на кручение - пониженное допускаемое напряжение на кручение
3.1.1 Ведущий вал
Т1
=56,98 Нм
 1 1
Принимается db
1
=30 мм
dn
1
= db
1
+2t2
где t=2,2мм
 мм мм
Принимается dn
1
=35 мм
Шестерни Z1
и Z1
являются единым целым с валом.

Рисунок 1 – Ведущий вал
 3 3
где s=1,6 мм
 мм мм
Принимается d2
=40 мм
Длиновые размеры:
l1
=56 мм, l2
=27 мм, l3
=219 мм, l4
=40 мм, l5
=21 мм.
3.1.2 Промежуточный вал
Средний диаметр вала рассчитывается по формуле
 мм 4 мм 4
Шестерня Z3
является единым целым с валом.
dk
2
=45 мм, dn
2
=40 мм
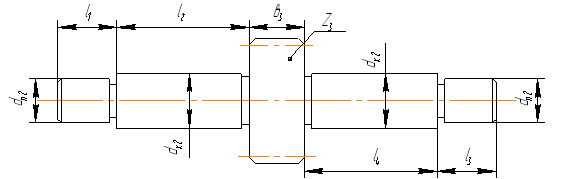
Рисунок 2 – Промежуточный вал
Длиновые размеры:
l1
= l3
= 40 мм, l2
= l4
= 66 мм, b3
=68 мм.
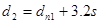
3.1.3 Тихоходный вал
 мм мм
dk
4
=60 мм, dБ
=70 мм, dn
3
=45 мм, dу
=40 мм, dш5
=35 мм, d2
=55 мм.
l1
=50 мм, l2
=77 мм, l3
=112 мм, l4
=175 мм, l5
=35 мм, l6
=105 мм, l7
=187 мм, l=370 мм.
Рисунок 3 – Тихоходный вал
3.2 Конструирование зубчатых колес
Шестерни Z1
и Z1
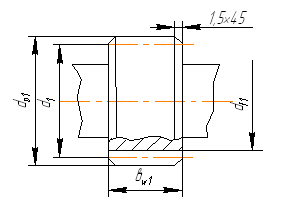
Рисунок 4 – Шестерни Z1
и Z1
Делительный диаметр d1
=55 мм
Диаметр окружности вершин зубьев dо1
=58 мм
Диаметр окружности впадин зубьев df
1
=51,25 мм
Ширина зубчатого венца bw
1
=21 мм
Колеса Z2
и Z2
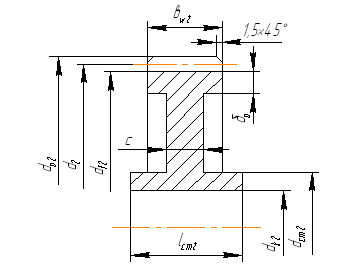
Рисунок 5 – Колеса Z2
и Z2
Делительный диаметр d2
=205 мм
Диаметр окружности вершин зубьев dо2
=208 мм
Диаметр окружности впадин зубьев df
2
=201,25 мм
Ширина зубчатого венца bw
2
=16 мм
Диаметр ступицы bст2
=70 мм
Длина ступицы lст2
=60 мм
Толщина диска с=5 мм
Толщина обода δо
=5 мм
Шестерня Z3
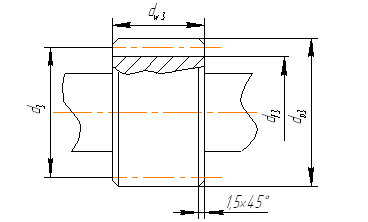
Рисунок 6 – Шестерня Z3
Делительный диаметр d3
=97,5 мм
Диаметр окружности вершин зубьев dо3
=86,25 мм
Диаметр окружности впадин зубьев df
3
=86,25 мм
Ширина зубчатого венца bw
3
=69 мм
Колесо Z4

Рисунок 7 – Колесо Z4
Делительный диаметр d4
=267,5 мм
Диаметр окружности вершин зубьев dо4
=272 мм
Диаметр окружности впадин зубьев df
4
=261,25 мм
Ширина зубчатого венца bw
4
=64 мм
Диаметр ступицы bст4
=96 мм
Длина ступицы lст4
=80 мм
Толщина диска с=20 мм
Толщина обода δо
=10 мм
3.3 Первый этап компоновки редуктора
Данный этап служит для приближенного определения положения зубчатых колес относительно друг друга и относительно опор.
Компоновочный чертеж выполняется в двух проекциях в масштабе 1:1
Толщина стенок корпуса и крышки δ= δ1
=8 мм
Толщина фланцев корпуса и крышки b=12 мм
Толщина нижнего пояса корпуса p=20 мм
Диаметры болтов
Болты крепящие редуктор к раме
d1
=19.30…21.16 мм
Принимаются болты с резьбой М20
Болты крепящие крышку к корпусу
d2
=10…13 мм
Принимаются болты с резьбой М12
Для крепления крышек подшипников принимаются болты с резьбой М8, зачерчиваем упрощенно колеса и шестерни.
Внутренняя стенка:
- зазор между торцами ступиц колес Z2
и Z2
и внутренней стенкой корпуса А1
=10 мм;
- зазор от окружности вершин до внутренней стенкой корпуса А2
= δ =8 мм;
- расстояние между наружным кольцом подшипника ведущего вала и внутренней стенкой корпуса А3
= δ =8 мм;
- расстояние между дном корпуса и поверхностью выступов зубьев колес Z4
А4
=32 мм.
Расстояние между колесами определяется конструктивно.
Для опор принимаются радиальные шариковые подшипники средней серии по ГОСТ 8338-75 (рисунок 8)

Рисунок 8 – Радиальный шариковый подшипник
В таблице 1 (Приложение 1) приведены основные данные подшипников.
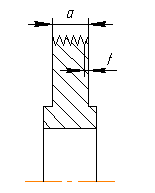
Рисунок 9 – Кольцо мазеудерживающее
а=6…9 мм, t=2…3 мм
Глубина гнезд подшипников l2
=40 мм
Толщина фланцев крышек подшипников равна диаметру отверстий Δ=d0
=9 мм
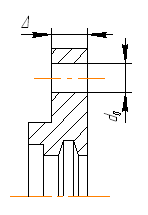
Рисунок 10 – Крышка подшипника
3.4 Подбор муфты
Ведущий вал редуктора соединяется с валом электродвигателя муфтой. Типоразмеры муфты подбираются по диаметрам соединяемых валов.
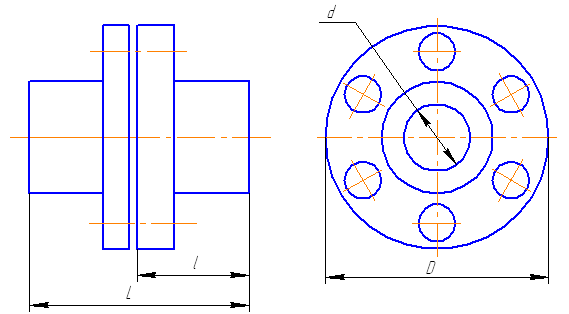
Рисунок 11 – Муфта
d=30 мм
D=120 мм
L=140 мм
l=80 мм
3.5 Конструирование корпусных деталей и крышек
Корпус редуктора служит для размещения и координации деталей передач, защиты их от загрязнения пылью, организации системы смазки, восприятия усилий, возникающих в зубчатых зацеплениях. Корпус редуктора выполняем разъемным, состоящим из основания (корпуса) и крышки.
Основные размеры корпуса указаны в пункте 3.3.
Оформление прилива подшипниковых гнезд.
Ведущий вал
Dподш
=80 мм
Dф
=112 мм
Dприл
=115 мм
Промежуточный вал
Dподш
=90 мм
Dф
=122 мм
Dприл
=125 мм
Ведомый вал
Dподш
=100 мм
Dф
=132 мм
Dприл
=135 мм
Глубина гнезд подшипников lг
=37,5 мм
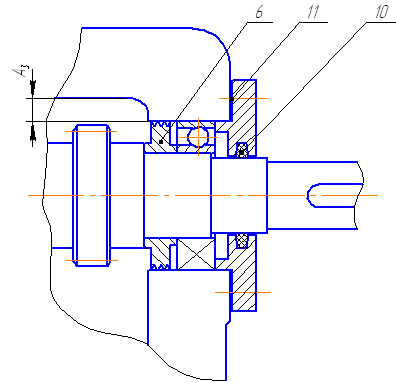
Рисунок 12 – Выходной конец вала

Рисунок 13 – Положение деталей относительно друг друга
Результаты расчетов размеров корпуса занесены в таблицу 2 (Приложение 1).
Крышка люка
δк
=2 мм

Рисунок 14 – Крышка смотрового окна
3.6 Эскизы стандартных деталей
Болты с шестигранной уменьшенной головкой ГОСТ 7808-80 Параметры болтов представлены в таблице 3 (Приложение 1)
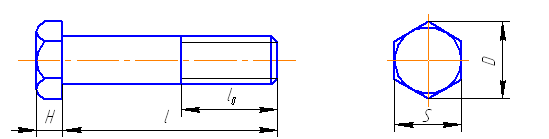
Рисунок 15 – Болт ГОСТ 7880-80
Винт с цилиндрической головкой по ГОСТ 1491-82
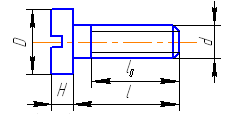
Рисунок 16 – Винт ГОСТ 1491-82
d=6 мм
D=10 мм
l=15 мм
l0
=10 мм
Н=4 мм
Гайки шестигранные с уменьшенным размеров под ключ ГОСТ 2524-80. Параметры гаек в таблице 4 (Приложение 1)
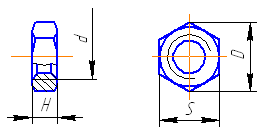
Рисунок 17 – Гайка ГОСТ 2524-80
Шайбы граверные ГОСТ 6402-80. Параметры шайб в таблице 5 (Приложение 1)

Рисунок 18 – Шайба ГОСТ 6402-80
Штифт конический с внутренней резьбой
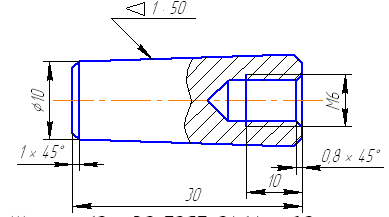
Рисунок 19 – Штифт ГОСТ 9464-80
Шпонки призматические со скругленными торцами ГОСТ 23360-80. Параметры шпонки в таблице 6 (Приложение 1)
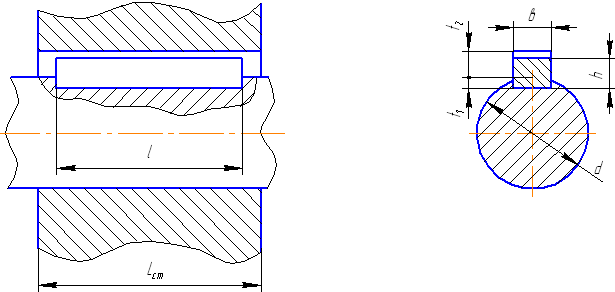
Рисунок 20 – Шпонка ГОСТ 23360-80
Подшипники радиальные упорные ГОСТ 8338-75. Параметры подшипников указаны в таблице 7 (Приложение 1)
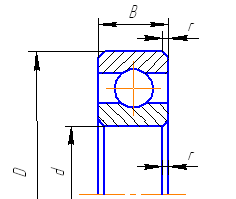
Рисунок 21 – Подшипник ГОСТ 8338-75
При создании параметризированной компоновки редуктора были изучены основные возможности CAD-пакета Компас-3DV11. Построение параметризированных 2D-моделей не полностью отражает все возможности параметризации, т.к. полная параметризация чертежей является излишней и только усложняет процесс проектирования.
Поэтому в будущем планируется параметризация 3D-моделей редуктора и составление компоновок многоступенчатых редукторов на основе 3D-моделей. Компас-3DV11 дает много возможностей для реализации этого проекта.
Список литературы
1. Проектирование механических передач: Учебно-справочное пособие для вузов / С.А. Чернавский, Г.А. Снесарев, Б.С. Козинцев и др. М.: Машиностроение, 1984. 560 с.
2. Казанский Г.И. Детали машин: Методические указания по рсчету зубчатых и червячных передач. Свердловск : УПИ, 1983. 44с.
3. Расчёт двухступенчатого цилиндрического редуктора: Методические указания к выполнению самостоятельной работы по курсам: «Детали машин», «Прикладная механика»/ Г.Л.Баранов, Л.В.Мальцев, Л.П.Вязкова. Екатеринбург: УГТУ-УПИ, 1994, Ч.1, 42 с.
4. Расчёт двухступенчатого цилиндрического редуктора: Методические указания к выполнению самостоятельной работы по курсам: «Детали машин», «Прикладная механика»/ Г.Л. Баранов, Л.В. Мальцев, Л.П. Вязкова. Екатеринбург: УГТУ-УПИ, 1994, Ч.2, 28 с.
|
