Міністерство освіти і науки України
Житомирський державний технологічний університет
Кафедра ТМ і КТС
Пояснювальна записка до курсової роботи з дисципліни:
"Розрахунок та моделювання верстатами"
на тему: "Модернізація приводу головного руху зі ступеневим регулюванням свердлильного верстата"
Житомир
2007
Глава 1. Розрахунок вихідних даних
1.1 Діаметри обробки


– приймаємо  . .
1.2 Глибина різання

 , ,
де  – діаметр обробки, мм; – діаметр обробки, мм;
1.3 Подача
Значення подачі  , , 
1.4 Швидкість різання

де  – розраховується для чистового точіння при: – розраховується для чистового точіння при:
– найменшій глибині різання  ; ;
– стійкості різального інструмента  ; ;
– коефіцієнті  для твердого сплаву; для твердого сплаву;
– коефіцієнті  ; (показники ступенів ; (показники ступенів  , , та та  –для твердого сплаву); –для твердого сплаву);
– подача для чистової обробки вибирається з довідника.

де  – розраховується при: – розраховується при:
– найбільшій глибині різання  ; ;
– стійкості різального інструмента ;
– коефіцієнті швидкорізальної сталі;
– коефіцієнті  ; (показники ступенів , та –для швидкорізальної сталі); ; (показники ступенів , та –для швидкорізальної сталі);
Частоти обертання шпинделя:


1.5 Сила різання, потужність двигуна

Приймаємо  , ,
де  – для твердосплавного інструменту; – для твердосплавного інструменту;

де  – ефективна потужність, кВт. – ефективна потужність, кВт.
Необхідна потужність електродвигуна:
 , ,
де  – коефіцієнт, який враховує потужність, що витрачається на рух подачі – коефіцієнт, який враховує потужність, що витрачається на рух подачі  ; ;
 – потужність холостого ходу верстата, – потужність холостого ходу верстата,  кВт. кВт.
Глава 2. Розрахунки кінематики приводу шпинделя зі ступеневим регулюванням
При відомих найбільшій та найменшій частотах обертання шпинделя кількість ступенів можна визначити за формулою:
 , ,
де  – діапазон частот обертання шпинделя. – діапазон частот обертання шпинделя.
Розрахунок починаємо з знаменника ряду  : :
 – умова не забезпечується. – умова не забезпечується.
Проводимо розрахунок з знаменником ряду  : :
 – умова не забезпечується – умова не забезпечується
Проводимо розрахунок з знаменником ряду  : :
 -- умова виконується -- умова виконується
Одержане значення округлюємо до  . .
2.1 Приводи шпинделя з двошвидкісним електродвигуном та автоматизованою коробкою передач
Конструктивний варіант для випадку  буде мати вигляд: буде мати вигляд:
 , ,
при цьому двошвидкісний двигун виконує роль першої структурної групи. Для доцільно вибирати двигун з діапазоном частот обертання вала  . .
Розширити діапазон регулювання АКП (і одночасно уникнути повторюваності частот) можна за рахунок використання вузла зворотного зв’язку.
Будуємо картину частот, прийнявши  об/хв., об/хв.,  об/хв. об/хв.
Реклама

2.2 Розрахунок чисел зубів зубчастих передач
З картини частот обертання шпинделя беремо передаточні відношення для кожної групи і виражаємо їх неправильним дробом.
Для І-ої групи:
 , ,  , ,
 ; ;
Розраховуємо мінімальне значення коефіцієнта корегування сумарного числа зубів у передачі:
 , ,
де  – найменша можлива кількість зубів в приводах головного руху верстатів, – найменша можлива кількість зубів в приводах головного руху верстатів,  ; ;  – сума чисельника та знаменника найменшого передаточного відношення і групі; – сума чисельника та знаменника найменшого передаточного відношення і групі;  – чисельник найменшого передаточного відношення в групі; – чисельник найменшого передаточного відношення в групі;
Маємо:

Розраховуємо сумарну кількість зубів в кожній зубчастій передачі в групі:
 , ,
Розраховуємо числа зубів ведучого та веденого коліс в кожній передачі:
Для ІІ-ої групи:
 , ,  , ,
 ; ;
Розраховуємо мінімальне значення коефіцієнта корегування сумарного числа зубів у передачі:
 , ,
Розраховуємо сумарну кількість зубів в кожній зубчастій передачі в групі:
 , ,
Розраховуємо числа зубів ведучого та веденого коліс в кожній передачі:
Для ІІІ-ої групи:
 , , , ,
 ; ;
Розраховуємо мінімальне значення коефіцієнта корегування сумарного числа зубів у передачі:
 , ,
Розраховуємо сумарну кількість зубів в кожній зубчастій передачі в групі:
 , ,
Розраховуємо числа зубів ведучого та веденого коліс в кожній передачі:
Оскільки , кількість зубців в І-й групі збільшуємо до
2.3 Розрахунок зубчастих передач
Орієнтовно модуль зубчастих передач в групі розраховується для пари з найменшим передаточним відношенням:
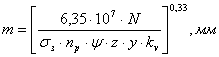
де N – потужність електродвигуна, кВт;
 – допустиме навантаження, Н/мм2
; – допустиме навантаження, Н/мм2
;
 – розрахункова частота обертання колеса, хв-1
; – розрахункова частота обертання колеса, хв-1
;
 – коефіцієнт ширини зубчастого колеса, – коефіцієнт ширини зубчастого колеса,  ; ;
 – кисло зубців колеса; – кисло зубців колеса;
 – коефіцієнт форми зубців; – коефіцієнт форми зубців;
 – коефіцієнт швидкості. – коефіцієнт швидкості.
Модуль в І-й групі:
 , ,
Приймаємо m=3.
Модуль в ІІ-й групі:
 , ,
Приймаємо m=6.
Модуль в ІІІ-й групі:
 , ,
Приймаємо m=4.
Розраховуємо міжосьові відстані  : :
 , ,
 , ,
 . .
Визначаємо діаметри та ширину зубчастих коліс і діаметри валів,  , ,  . .
Для І-ої групи:
Для ІІ-ої групи:
Для ІІІ-ої групи:
Оскільки  , тобто не виконується умова монтажу, змінимо сумарну кількість зубців в парах (кратно передаточним відношенням), не виходячи за , тобто не виконується умова монтажу, змінимо сумарну кількість зубців в парах (кратно передаточним відношенням), не виходячи за  . .
Збільшимо сумарну кількість зубців в ІІІ-ій групі в 2 рази, а в ІІ-ій – зменшимо в 2 рази, тоді міжосьові відстані матимуть значення:
Діаметри зубчастих коліс в ІІ-й та ІІІ-й групах:
Тепер умова монтажу виконується:  . .
Ширина зубчастих коліс:



Діаметри валів приймаємо орієнтовно  : :




4.2 Конструювання шпиндельного вузла
Шпиндельні вузли металорізальних верстатів проектуються в більшості випадків з підшипниками кочення в опорах. Використовують в опорах як кулькові, так і роликові підшипники. Підшипники опор повинні витримувати радіальне та осьове навантаження, що діють на шпиндель в процесі роботи верстата. Для протидії осьовому навантаженню упорні підшипники можна проектувати як в передній, так і в задній опорах. Використання радіально-упорних або упорних підшипників в передній опорі більш ефективне, тому що розвантажує шпиндель від осьових сил різання, але при цьому ускладнюється конструкція та розміри передньої опори.
Реклама

Спеціальні роликові шпиндельні підшипники проектують в опорах шпинделів при максимальній частоті обертання 2000…2500 обертів за хвилину. Вкорочені циліндричні ролики підвищують допустиму швидкість обертання.
Передній кінець шпинделя повинен мати строго стандартизовані як форму, так і розміри.
4.3 Розрахунок радіальної жорсткості шпинделя, розвантаженого від згинного моменту
В процесі роботи металорізального верстата геометрична вісь шпинделя змінює своє положення внаслідок податливості опор від дії сил різання , згинних моментів та зсуву від поперечних сил. Фактичне положення геометричної осі шпинделя буде залежати від жорсткості шпиндельного вузла, яка може бути визначена за принципом суперпозиції.
Розрахункова схема:
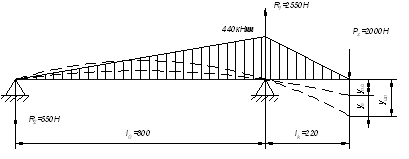
Реакції в опорах:
 ; ;
 ; ;
Пружне переміщення тіл кочення та кілець підшипників в передній опорі:
 . .
Контактна деформація посадочних поверхонь підшипника і корпуса:
 . .
Жорсткість передньої опори:
 . .
Податливість передньої опори:
 . .
Пружне зближення тіл кочення та кілець підшипників в задній опорі:
 . .
Контактна деформація підшипників і корпуса задньої опори:

Жорсткість задньої опори:
 . .
Податливість задньої опори:
 . .
Переміщення переднього кінця шпинделя від згинних навантажень:
 , ,
 – момент інерції шпинделя між опорами; – момент інерції шпинделя між опорами;
 – момент інерції консолі; – момент інерції консолі;
 – коефіцієнт защемлення; – коефіцієнт защемлення;
 . .
Переміщення переднього кінця шпинделя за рахунок податливості опор:
  . .
Переміщення переднього кінця шпинделя від зсуву за рахунок поперечних сил:
 , ,
де  – модуль зсуву, – модуль зсуву,
  – площа перерізу консолі шпинделя, мм2
; – площа перерізу консолі шпинделя, мм2
;
  – площа перерізу шпинделя між опорами, мм2
; – площа перерізу шпинделя між опорами, мм2
;

Радіальна жорсткість шпиндельного вузла:
 , ,
 . .
Радіальне переміщення шпинделя в точці заміру жорсткості:


4.4 Розрахунок осьової жорсткості шпинделя, розвантаженого від згинного моменту
Осьову жорсткість шпинделя розраховують за осьовою силою, що діє на шпиндель.
Приймаємо осьове навантаження від сил різання:

Пружне переміщення тіл кочення та кілець підшипника передньої опори:

де – кількість кульок підшипника;
 – діаметр кульок. – діаметр кульок.
Контактна деформація стиків задньої опори в місцях дотику:
 , ,

де  – діаметр корпусу в зоні дотику, мм; – діаметр корпусу в зоні дотику, мм;
 – внутрішній діаметр підшипника, мм; – внутрішній діаметр підшипника, мм;
 – коефіцієнт деформації дотику. – коефіцієнт деформації дотику.
Осьова жорсткість шпиндельного вузла:
 . .
Кут нахилу шпинделя в передній опорі:
 . .
4.5 Розрахунок точності підшипників шпиндельного вузла
У зв’язку з тим, що шпиндельний вузол є визначальним за точністю металорізального верстата, виникає необхідність провести розрахунки точності підшипників в шпиндельних опорах. Пов’язані ці розрахунки з визначенням биття осі шпинделя в опорах.
Приймаємо коефіцієнт  , для верстатів нормальної точності. , для верстатів нормальної точності.
Биття переднього кінця шпинделя:
 ; ;
У зв’язку з тим, що при експлуатації верстата биття в підшипниках збільшується в розрахунках приймають:
 ; ;
Биття осі шпинделя в передній опорі:
 ; ;
Биття осі шпинделя в задній опорі:

|
