| Кафедра «Основы проектирования машин»
Курсовая работа
Поперечно-строгальный станок
Содержание
1. Кинематический анализ рычажного механизма
1.1 Структурный анализ механизма
1.2 Определение недостающих размеров
1.3 Определение скоростей точек механизма
1.4 Определение ускорений точек механизма
1.5 Определение угловых скоростей и ускорений звеньев
1.6 Диаграммы движения выходного звена
1.7 Аналитический метод анализа рычажного механизма
2. Силовой анализ рычажного механизма
2.1 Определение сил инерции
2.2 Расчёт диады 4-5
2.3 Расчёт диады 2-3
2.4 Расчёт кривошипа
2.5 Определение уравновешивающей силы методом рычага Жуковского
2.6 Определение мощностей
2.7 Определение кинетической энергии и приведенного момента инерции механизма
2.8 Определение сил инерции
3. Геометрический расчёт прямозубой передачи. Проектирование планетарного редуктора
3.1 Геометрический расчёт прямозубой передачи
3.2 Синтез и анализ комбинированного зубчатого механизма
3.3 Построение плана скоростей и частот вращения звеньев зубчатого механизма
Список литературы
1. Кинематический анализ рычажного механизма
Исходные данные:
Ход долбяка:____________________ H=320 мм
Коэффициент производительности:_ K=1,3
Отношения длин звеньев :_________ О2О3/BO3=1,25; BC/BO3=1,8
Частота вращения кривошипа :_____ n =97 об/мин
1.1 Структурный анализ механизма
Степень подвижности механизма:
Для определения степени подвижности механизма воспользуемся формулой Чебышева.
W = 3k - 2p1 - p2
где k -число подвижных звеньев;
p1 -число одноподвижных кинематических пар;
p2 -число двухподвижных кинематических пар;
Для данного механизма: k = 5; p1 = 7; p2 = 0. Тогда
W = 3 · 5 – 2 · 7 – 0 = 1
Разложение механизма на структурные группы Ассура :
Формула строения механизма : I(0,1)®II(2,3)®II(4,5)
Вывод: механизм II класса.
1.2 Определение недостающих размеров
Угол размаха кулисы:
β = 180˚·(k-1)/(k+1) = 180˚·(1,3-1)/(1,3+1) = 23028I
Угол рабочего хода:
φpx = β +1800 = 203º
Угол холостого хода:
φxx =1800- β = 154º
O3B=160/sin11o=786.8mm
O2O3=983.5 mm
Масштабный коэффициент построения схемы:
Kl = lO1A / O1A = 0,113 / 113 = 0,001
Строим 12 планов механизма, приняв за начало отсчёта крайнее положение, соответствующее началу рабочего хода механизма.
Реклама

1.3 Определение скоростей точек механизма
Определим угловую скорость ω1 кривошипа по формуле :
ω1 = (π · nкр) / 30º = (3,14 · 132) / 30º = 13,816 рад/с
Определяем скорость точки А :
VA = ω1 · lO1A = 13,816 · 0,113 = 1,561 m/c
Масштабный коэффициент для плана скоростей :
KV = VA / PVA =1,561 / 50 = 0,003 m/c·mm
Для точки А’ (внутренней пары диады) напишем систему уравнений :
VA’ = VA + VA’A
VA’ = VO2 + VA’O2
Эту систему решаем графически:
VA’ = KV · PVA = 0,003 · 50 = 1,5 m/c
Скорость точки В находим методом подобия. Для этого составляем пропорцию :
PVB / PVA’ = O2B / O2A’
PVB = (O2B / O2A’) · PVA’ = (70 / 147) · 50 = 23,8 mm
Абсолютная величина скорости точки B:
VB = KV · PVB = 0,003 · 23,8 = 0,0714 m/c
Скорость точки С определяем графически, решая систему уравнений :
 VC = VB + VBC VC = VB + VBC
VC =VO2 + VO2B
VC = KV · PVC = 0,003 · 24 = 0,072 m/c
1.4 Определение ускорений точек механизма
Ускорение точки А :
aA = an = ω12 · lO1A = 13,8162 · 0,113 = 0,2157 m/c2
aA направлен по кривошипу к центру вращения O1
Масштабный коэффициент для плана ускорений :
KA = aA / PAA = 0,2157 / 50 = 0,004 m/c2mm
Для точки А’ напишем систему уравнений :
   aA’ = aA + akA’A + aτA’A aA’ = aA + akA’A + aτA’A
 aA’ = aO2 + anA’O2 + aτA’O2 aA’ = aO2 + anA’O2 + aτA’O2
Ускорения aA’A и aA’O2 раскладываем на составляющие :
akA’A = 2VA’A · ω3 = 2 · 0,15 · 1,02 = 0,306 m/c2
anA’O2 = V2A’O2 / lA’O2 = 0,153 m/c2
aτA’A = 0 (так как движение камня по кулисе прямолинейное);
Величина
PaakA’A = akA’A / KA = 0,0306 / 0,004 = 7,7 mm
PaanA’O2 = anA’O2 / KA = 0,153 / 0,004 = 38,25 mm
Далее ускорение точки А’ находим графически:
aA’ = PAA’ · KA = 50 · 0,004 = 0,2 m/c2
Ускорение точки В находим методом подобия: PAB / PAA’ = O2B / O2A’
PAB = (O2B / O2A’) · PAA’ = (70 / 147) · 50 = 23,8 mm
Абсолютная величина ускорения точки B:
aB = PAB · KA =23,8 · 0,004 = 0,095 m/c2
Ускорение точки С определяем графически, решая систему уравнений :
 aC = aB + aBC + aτB aC = aB + aBC + aτB
aC = aO2 + aO2C + anB
anB = V2B / lO2B = 0,07142 / 0,07 = 0,0728 m/c2
aτB = PτAB · KA = 40 · 0,004 = 0,16 m/c2
Абсолютная величина ускорения точки С равна:
aC = PAC · KA = 58 · 0,004 = 0,232 m/c2
1.5 Определение угловых скоростей и ускорений звеньев.
ω1 [C1]
= ( π · nкр ) / 30º = ( 3,14 · 132 ) / 30 = 13,8 рад/с
ω3 = VA’ / lO2A’ = 1,5 / 0,147 = 10,2 рад/с
ω4 = VBC / lBC = 2,33 / 0,21 = 11,1 рад/с
ε3 = aτA’O2 / lA’O2 = 0,022 / 0,147 = 0,15 рад/с2
Реклама

ε4 = aτВС / lBC = 0,16 / 0,21 = 0,76 рад/с2
| Номер звена
|
1
|
2
|
3
|
4
|
5
|
| ω рад/с
|
13,8
|
0
|
10,2
|
11,1
|
0
|
| ε рад/с2
|
0
|
0
|
0,15
|
0,76
|
0
|
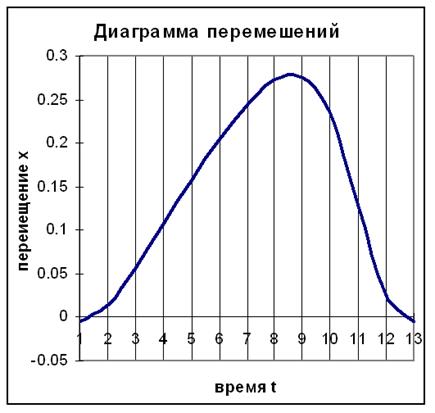
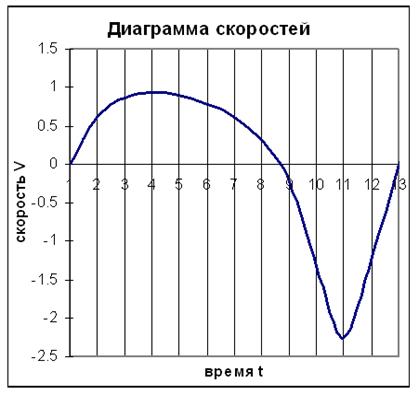
1.6 Диаграммы движения выходного звена
Диаграмму перемещения S-t строим, используя полученную из плана положений механизма траекторию движения точки С.
Диаграммы скоростей V-t и ускорений a-t строим методом хорд.
Масштабные коэффициенты диаграмм :
KL = 0,001 m/mm
KT = 0,005 c/mm
KV = 0,003 m/c·mm
KA = 0,004 m/c·mm2
1.7 Аналитический метод анализа рычажного механизма
Положение точки А определяется уравнениями :
ХA = r · Sin( f );
YA = e + r · cos( f ).
Угол размаха кулисы можно определить по уравнению :
f = arctg ( XA / YA ).
Скорость точки А1 , принадлежащей кривошипу 1 равна :
V = ω1 · r.
Скорость точки А3, принадлежащей кулисе 3 равна :
V = V · Cos( f – f3 ) = ω1 · r · Cos( f – f3 ).
Расстояние
AB=XA +YA=r · Sin(f) +e+2 · e · r · Cos(f)+r · Cos(f)=r+e+2 · e · r · cos( f ).
Угловая скорость кулисы :
ω = ωкр·λ·(λ+cos(f)) / (1+2λcos(f)+λ2)
Продифференцируем предыдущее уравнение по времени :
ε = ω2кр·a·r·((a2-r2)sin(f)) / (a2 + 2a·r·cos(f) + r2)2
Перемещение долбяка 5 :
X = r1 · Cos( f ) + l · Cos( arcsin((lO2B·sin (f))/lBC)).
Угол определим по формуле :
cos (f) = r/a
Скорость долбяка 5 определяется по формуле :
V = r·ωкр(sin(f) + 1/2·λ·sin2(f))
Ускорение долбяка 5:
a = r·ω2кр·(cos(f)+ λcos2(f))
Составляем программу для вычисления скоростей и ускорений долбяка 5 и для построения диаграмм скорости и ускорения долбяка 5.
Sub tron()
Dim a, e, h, r, n, w, fi, w1, alf As Double
Worksheets(1).Activate
a = Range("b2").Value
r = Range("b3").Value
n = Range("b4").Value
w1 = 3.14159265358979 * n / 30
alf = 0
h = 30 * 3.14159265358979 / 180
For n = 1 To Range("c2:c14").Count
F = Atn(r * Sin(alf) / (a + r * Cos(alf)))
fi = (180 / 3.14159265358979) * F
w = w1 * r * (r + a * Cos(alf)) / (a ^ 2 + 2 * a * r * Cos(alf) + r ^ 2)
e = w1 ^ 2 * a * r * (a ^ 2 - r ^ 2) * Sin(alf) / ((a ^ 2 + 2 * a * r * Cos(alf) + r ^ 2) ^ 2)
Range("c2:c14").Cells(n, 1) = fi
Range("c2:c14").Cells(n, 2) = w
Range("c2:c14").Cells(n, 3) = e
alfa = alf * 180 / 3.14159265358979
Range("c2:c14").Cells(n, 4) = alfa
alf = alf + h
Next n
End Sub
2. Силовой анализ рычажного механизма
2.1 Определение сил инерции
Исходные данные :
Масса кулисы 3 : m = 30 кг ;
Масса шатуна 4 : m = 10 кг ;
Масса долбяка 5 : m = 72 кг ;
Определяем веса звеньев :
G3’ = m3’ · g = 11,5 · 9,8 = 112,8519 H ;
G3” = m3” · g = 18,4845 · 9,8 = 181,104 H ;
G4 = m4 · g = 10 · 9,8 = 98 H ;
G5 = m5 · g = 72 · 9,8 = 705,6 H .
Сила полезного сопротивления : Q = 2000 H.
Вычисляем силы инерции :
U3’ = m3’ · aS3’ = 18,4845*2,56375 = 47,3896 H ;
U3” = m3“ · aS3“ = 11,5155*1,5875 = 18,28 H ;
U4 = m4 · aS4 = 10 · 2,3 = 23 H ;
U5 = m5 · aS5 = 72· 0,92= 66,24 H ;
2.2 Расчёт диады 4-5
Составляем уравнение равновесия диады:
Σ P (4 ;5) = 0 ;
R50 + Q + U5 + G5 + U4 + G4 + Rτ43 + Rn43 =0
Составим сумму моментов сил звена 4:
Σ MC ( зв.4 ) = 0
G4 · hG4 + U4 · hU4 - Rτ43 · lBC = 0;
Rτ43 = ( G4 · hG4 + U4 · hU4 ) / lBC = ( 800 · 0,052 + 14,4 · 0,131 ) / 0,21 = 57,815 (Н)
Строим план сил диады 4-5 в масштабе:
Kp = Q/Q = 2000 / 200 = 10 H/мм ;
Считаем отрезки плана сил в мм.
Q = 2000 / 10 = 200 (мм); G5 = 705,6 / 10 = 70,56 (мм); U5 = 66,24 / 10 = 6,624 (мм);
G4 = 98 / 10 =9,8 (мм); U4 = 23 / 10 = 2,3 (мм);
Из плана сил определяем реакции
R43 = R43 · Kр = 209,92 · 10 = 2099,2 Н
R50 = R50 · Kр = 104,86 · 10 = 1048,6 Н
2.3 Расчет диады 2-3
Составляем уравнение равновесия диады: Σ P (2 ;3) = 0 ;
R21 + G’3 + U’3 + G”3 + U”3 + R43 + R30 = 0
Составим сумму моментов сил звена 3:
Σ MO2 (зв.3) = 0
- R21 · lAO2 – U’3 · hU’3 + G’3 · hG’3 + G”3 · hG”3 + R34 · lO2B = 0
R21 = (– U’3 · hU’3 + G’3 · hG’3 + G”3 · hG”3 + R34 · lO2B) / lAO2 = 1403,367 (H)
Строим план сил диады 2-3, считаем отрезки плана сил:
R34 = R34 / Kp =10100 / 100 = 101 mm; U”3 = 0,32 / 100 = 0,0032 mm;
G”3 = 20 / 100 = 0,2 mm; G’3 = 50 / 100 = 0,5 mm; U’3 = 0,7 / 100 = 0,007 mm;
R21 = 4820,48 / 100 = 48,2 mm
Из плана сил определяем реакции
R30 = R30 · Kp = 104 · 100 = 684 (H)
Внутреннюю силу R23 находим из условия равновесия ползуна
Σ P(2) = 0
R23 + R21 = 0 => R23 = - R21
R23 = 1403,367 (H)
Расчет кривошипа
Составим уравнение равновесия кривошипа
 Σ P = 0 Σ P = 0
 Py + P12 + R10 = 0 Py + P12 + R10 = 0
Составим сумму моментов сил звена 1
Σ MO1(зв.1) = 0
Py = 1382,928 (H)
Строим план сил, считаем отрезки сил
2.5 Определение уравновешивающей силы методом рычага Жуковского
 Построим повёрнутый на 90 градусов (в нашем случае против часовой стрелки) план скоростей и к нему приложим все внешние силы, действующие на механизм. Составим уравнение моментов относительно полюса : Построим повёрнутый на 90 градусов (в нашем случае против часовой стрелки) план скоростей и к нему приложим все внешние силы, действующие на механизм. Составим уравнение моментов относительно полюса :
Σ Mp = 0 ;
U3 · hU3 – U4 · hU4 – G3 · hG3 – G4 · hG4 – (Q + U5 + G5) · (h(Q + U5 + G5)) – P’y · PVa3 = 0
Отсюда P’y = 1394,788 (H)
Определяем погрешность :
S = (P’y – Py) / P’y · 100% = 0,85%
2.6 Определение мощностей
Определяем потери мощности на трение в кинематических парах.
Мощность от силы в поступательных парах :
Nп = f · R · Vотн .
N23 = f · R23 · VA’A = 4820,48 · 0,16 · 0,015 = 11,57 (Вт)
N50 = f · R50 · VC = 0,16 · 3300 · 0,072 = 38 (Вт)
Мощность привода, затрачиваемая на преодоление полезной нагрузки
NA = Q · VC = 7500 · 0,072 = 540 (Вт)
Потери на мощность во вращательных парах :
Nвр = f ‘·R · r · ωОТН
N10 = R10 · f’ · (ω1 –ω0) · r = 500 · 0,24 · 13,8 · 0,02 = 33,12 Вт
N30 = R30 · f’ · (ω3 –ω0) · r = 10400 · 0,24 · 10,2 · 0,02 = 509,2 Вт
N34 = R34 · f’ · (ω3 –ω4) · r = 10100 · 0,24 · 10,2 · 0,02 = 494,5 Вт
где f - коэффициент трения скольжения ;
f ‘= (1,2...1,5) · f - коэффициент трения скольжения приведенный ;
R - реакция в кинематической паре ;
r - радиус цапфы вала ;
Vотн и ωОТН - относительные линейная и угловая скорости звеньев, образующих пару ;
f = 0,16
f ‘ = 0,24
r = 0,02 m
Суммарная мощность :
NТР = N10 + N12 + N23 + N34 + N45 + N30 = 1086,4
Мощность привода на преодоление полезной нагрузки :
N = Q · Vв = 7500 · 0,0714 = 535,5 (Вт) .
Мгновенная потребная мощность двигателя :
N = Npy + Nтр ;
N = 540 + 1086,4 = 1626,4 (Вт)
2.7 Определение кинетической энергии и приведенного момента инерции механизма
Кинетическая энергия механизма равна сумме кинетических энергий звеньев, составляющих механизм, и рассчитывается для 3-го положения.
Тмeх = Σ Тi = Т3 + Т4 + Т5
Кинетическая энергия звена 3 рассчитывается по формуле :
Т3 = (J3 · ω3)/2 ;
J3 = J3’ + J3’’;
J3’ = (m3’ · O2A3)/3 = (5 · 0,147 )/3 = 0,245 кг·м ;
J3’’ = (m3’’ · O2B )/3 = (2 · 0,07 )/3 = 0,047 кг·м ;
J3 = 0,245 + 0,047 = 0,292 кг·м ;
Т3 = (0,292 · 10,2 )/2 = 1,5 Дж;
Кинетическая энергия звена 4 рассчитывается по формуле :
Т4 = (J4 · ω4 )/2 + (m4 · V )/2 ;
J4 = (m4 · BC )/12 = (80·0,21 )/12 = 1,4 кг·м ;
V = ω4 · BC/2 = 11,1·0,21/2 = 1,17 м/с ;
T4 = (1,4·11,1 )/2 + (80·1,17 )/2 = 54,57 Дж ;
Движение звена 5 рассматриваем как поступательное. Кинетическая энергия :
Т5 = (m5 · Vc )/2 = (140· 0,072 )/2 = 5,04 Дж ;
Тмех = Т3 + Т4 + Т5 = 1,5 + 54,57 + 5,04 = 61,11 Дж .
За звено приведения принимаем кривошип.
Jпр = (2·Tмех)/ω1 = (2·61,11)/13,816 = 8,85 кг·м ;
2.8 Определение сил инерции
Для аналитического вычисления сил инерции воспользуемся аналитическим расчётом рычажного механизма.
Ускорение
ε3 = aτA3O2 / lO2A = 12 · KA / 0,147 = 0,327
ε4 = aτCB / lCB = 40 · KA / 0,21 = 0,762
Момент
М = J · ε H·м ;
Момент инерции
J’3 = ((m · 02A2) / 12) = 0,009 кг·м;
J”3 = 0,00082 кг·м
J4 = 0,294 кг·м
Тогда М’3 = 0,009 · 0,327 = 0,003 H·м .
М”3 =0,00082 · 0,327 = 0,00027 H·м
M4 = 0,294 · 0,762 = 0,224 Н·м
Составим программу:
Sub analit()
f0 = 0.24
w1 = 13.8
e1 = 0
n = 12
l1 = 0.035
l2 = 0.21
l3 = 0.07
l4 = 0.147
h = 0.14
m2 = 7
m3 = 80
m5 = 140
lk = 0.37
Worksheets(1).Range("a1") = "результаты аналитического расчета"
Worksheets(1).Range("a2") = "начальные параметры"
Worksheets(1).Range("a3") = "f0"
Worksheets(1).Range("b3") = f0
Worksheets(1).Range("a4") = "w1"
Worksheets(1).Range("b4") = w1
Worksheets(1).Range("a5") = "e1"
Worksheets(1).Range("b5") = e1
Worksheets(1).Range("a6") = "полученные значения"
Worksheets(1).Range("a7") = "N"
Worksheets(1).Range("b7") = "S"
Worksheets(1).Range("c7") = "V"
Worksheets(1).Range("d7") = "a"
df = 2 * 3.14 / n
f1 = f0 + df
For i = 0 To n
f1 = f1 - df
Worksheets(1).Cells(i + 8, 1).Value = i
'определение углов поворота
a = l1 * Cos(f1) + 14
b = l1 * Sin(f1)
aa = (a ^ 2 + b ^ 2 + l2 ^ 2 - l3 ^ 2) / (2 * a * l2)
bb = b / a
'определение угла f2
cf2 = -((aa + bb * ((1 - aa ^ 2 + bb ^ 2))) ^ 0.5) / (1 + bb ^ 2)
tf2 = (1 / ((cf2 ^ 2) - 1)) ^ 0.5
f2 = Atn(tf2)
If cf2 < 0 Then
tf2 = -tf2
f2 = Atn(tf2) + 3.14
End If
'определение угла f3
cf3 = (a + l2 * cf2) / l3
tf3 = (1 / ((cf3 ^ 2) - 1)) ^ 0.5
f3 = Atn(tf3)
If cf3 < 0 Then
tf3 = -tf3
f3 = Atn(tf3) + 3.14
End If
'определение угловых скоростей
i31 = (l1 * Sin(f1 - f2)) / (l3 * Sin(f3 - f2))
i21 = -(l1 * Sin(f1 - f3)) / (l2 * Sin(f2 - f3))
w3 = w1 * i31
w2 = w1 * i21
'определение угловых ускорений
i131 = (l1 * Cos(f1 - f2) + i21 ^ 2 * l2 - i31 ^ 2 * l3 * Cos(f3 - f2)) / (l3 * Sin(f3 - f2))
i121 = -(l1 * Cos(f1 - f3) - i31 ^ 2 * l3 + i21 ^ 2 * l2 * Cos(f2 - f3)) / (l2 * Sin(f2 - f3))
e3 = w1 ^ 2 * i131 + e1 * i31
e2 = w1 ^ 2 * i121 + e1 * i21
'определение перемещения питателя
s = h * (Tan(0.261666) - Tan(f3 - 1.57))
Worksheets(1).Cells(i + 8, 2).Value = s
'определение скорости питателя
v = h * w3 / ((Cos(f3 - 1.57)) ^ 2)
Worksheets(1).Cells(i + 8, 3).Value = v
'определение ускорения питателя
usk = -h * (e3 * Cos(f3 - 1.57) + 2 * w3 ^ 2 * Sin(f3 - 1.57)) / ((Cos(f3 - 1.57)) ^ 3)
Worksheets(1).Cells(i + 8, 4).Value = usk
'определение ускорений звеньев
a1n = w1 ^ 2 * l1
a2n = w2 ^ 2 * l2 / 2
a2t = e2 * l2 / 2
a2 = ((a1n * Cos(f1) + a2n * Cos(f2) + a2t * Cos(f2 - 1.57)) ^ 2 + (a1n * Sin(f1) + a2n * Sin(f2) + a2t * Sin(f2 - 1.57)) ^ 2) ^ 0.5
a3n = w3 ^ 2 * (lk / 2 - l3)
a3t = e3 * (lk / 2 - l3)
a3 = (a3n ^ 2 + a3t ^ 2) ^ 0.5
a5 = usk
'определение сил и моментов инерции
Worksheets(2).Cells(i + 8, 1).Value = i
u3 = -m3 * a3
Worksheets(2).Cells(i + 8, 2).Value = u3
mu3 = -m3 * l3 ^ 2 * e3 / 12
Worksheets(2).Cells(i + 8, 3).Value = mu3
u4 = -m4 * a4
Worksheets(2).Cells(i + 8, 4).Value = u4
mu4 = -m4 * lk ^ 2 * e4 / 12
Worksheets(2).Cells(i + 8, 5).Value = mu4
u5 = -m5 * a5
Worksheets(2).Cells(i + 8, 6).Value = u5
Next i
Worksheets(2).Range("a1") = "результаты аналитического расчета"
Worksheets(2).Range("a2") = "начальные параметры"
Worksheets(2).Range("a3") = "m3"
Worksheets(2).Range("b3") = m3
Worksheets(2).Range("a4") = "m4"
Worksheets(2).Range("b4") = m4
Worksheets(2).Range("a5") = "m5"
Worksheets(2).Range("b5") = m5
Worksheets(2).Range("a6") = "полученные значения"
Worksheets(2).Range("a7") = "N"
Worksheets(2).Range("b7") = "u3"
Worksheets(2).Range("c7") = "mu3"
Worksheets(2).Range("d7") = "u4"
Worksheets(2).Range("e7") = "mu4"
Worksheets(2).Range("f7") = "u5"
End Sub
3. Геометрический расчёт прямозубой передачи. Проектирование планетарного редуктора
3.1 Геометрический расчёт прямозубой передачи
Исходные данные :
Число зубьев шестерни : Z5 = 12.
Число зубьев колеса : Z6 = 30.
Модуль зубчатых колёс : m = 6.
Коэффициент высоты головки : ha* = 1.
Коэффициент радиального зазора : с* = 0,25.
Zсум = Z5 + Z6 = 12 + 30 = 42 > 34, =>,
коэффициент смещения шестерни определяется по формуле :
Х5 = (17 – Z5)/17 =(17 – 12)/17 = 0,294
а коэффициент смещения колеса :
X6 = - Х5 = -0,294
Угол профиля исходного профиля = 20˚ .
Делительное межосевое расстояние :
а = 0,5 · m · Zсум.= 0,5 · 6 · 42 = 126 mm
Коэффициент воспринимаемого смещения:
y = 0.
Коэффициент уравнительного смещения:
y = 0.
Делительная высота головки зуба :
ha5 = m · (ha* + X5) = 6 · (1+0,294) = 7,764 мм
ha6 = m · (ha* + X6) = 6 · (1-0,294) = 4,236 мм
Делительная высота ножки зуба :
hf5 = m · (ha* + c* - X5) = 6 · (1+0,25-0,294) = 5,736 mm
hf6 = m · (ha* + c* - X6) = 6 · (1+0,25+0,294) = 9,264 mm
Высота зуба :
h = 2,25 · m = 2,25 · 6 = 13,5 мм
Делительный диаметр :
d5 = m · Z5 = 6 · 12 = 72мм
d6 = m · Z6 = 6 · 30 =180мм
Основной диаметр :
db5 = m · Z5 · Cos(α) = 6 · 12 · cos20˚ = 67,68 mm
db6 = m · Z6 · Cos(α) = 6 · 30 · cos20˚ = 169,2 mm
Диаметр вершин :
dа5 = m · Z5 + 2 · m · (ha* + X5) = 6 · 12 + 2 · 6(1+0,294) = 87,528 mm
dа6 = m · Z6 + 2 · m · (ha* + X6) = 6 · 30 + 2 · 6(1-0,294) = 188,472 mm
Диаметр впадин :
df5 = m · Z5 - 2 · m · (ha* +c* + X5) = 6 · 12 – 2 · 6(1+0,25-0,294) =60,528 mm
df6 = m · Z6 - 2 · m · (ha* +c* - X6) = 6 · 30 – 2 · 6(1+0,25-0,294) =161,472 mm
Делительная толщина зуба :
S5 = 0,5 · π · m +2 · m · X5 · tg(α ) = 11,67796 mm
S6 = 0,5 · π · m +2 · m · X6 · tg(α ) = 7,16208 mm
Толщина зуба по окружности вершин :
Sa5 =da5 · ( S5 /d5 + inv20˚ + invαa5 ) = 3,862 mm
Sa6 =da6 · ( S6 /d6 + inv20˚ + invαa6 ) = 3.7862 mm
Делительный шаг :
P = π · m = 18.84 mm
Оновной шаг :
Pb = π · m · cosα = 3,14 · 6 · 0,94 = 17.71
По результатам расчёта строим картину равносмещённого эвольвентного зацепления.
3.2 Синтез и анализ комбинированного зубчатого механизма
Исходные данные :
n = 1455 мин-1 ;
n = 97 мин-1 ;
U16 = “-”;
Z5 = 12;
Z6 = 30:
Общее передаточное отношение привода :
U16 = -(nДВ / n6) = -(n1 / n6) = -(1455 / 97) = -(5.31) .
Передаточное отношение простой ступени :
U56 = -(Z6 / Z5) = -(30/12) .
Передаточное отношение планетарной ступени :
U1H = U16 / U56 = 6.1263 .
Формула Виллиса :
UH14 = (n1 - nH)/(n4 - nH) = (U1H –1)/(0-1) = 1- U1H = 1.2
Передаточное отношение U H14 через число зубьев :
U H14 = (-Z2/Z1)/(- Z4/ Z3) = (Z2· Z4)/(Z1· Z3) = -(6/5)
Из условия соосности определяем неизвестные числа зубьев колёс :
Z1 + Z2 = Z3 + Z4 .
Принимаем : Z1 = 2 ; Z2 = 1 ; Z3 = 3 ; Z4 = 5 .
2 + 1 = 3 16
3 + 5 = 8 6
В итоге принимаем : Z1 = 32 ; Z2 = 16 ; Z3 = 18 ; Z4 = 30 .
3.3 Построение плана скоростей и частот вращения звеньев зубчатого механизма
Диаметры всех колёс :
d1 = m·Z1 = 6·32 = 192 мм ;
d2 = m·Z2 = 6·16 = 96 мм ;
d3 = m·Z3 = 6·18 = 108 мм
d4 = m·Z4 = 6·30 = 180 мм
d5 = m·Z5 = 6·12 = 72 мм
d6 = m·Z6 = 6·30 = 180 мм
Принимаем масштабный коэффициент построения схемы механизма :
КL = 0,001 м/мм ;
Определяем скорость точки, принадлежащей ведущему звену (точка А):
Va = ω1 · d = 24 м/с ;
Принимаем масштабный коэффициент построения плана скоростей :
Кv =0,4 м/(c·мм) ;
Выполняем построение плана скоростей.
Построение плана частот вращения.
Принимаем масштабный коэффициент построения плана частот вращения :
Кv =20 мин /мм ;
Выполняем построение плана частот вращения.
Значения частот, полученных графически :
n1 = 24·40 = 960 мин-1
n2 = 262·40 = 10480 мин-1
n3 = 262·40 = 10480 мин-1
n5 = 121·40 = 4840 мин-1
n6 = 37·40 = 1480 мин-1
nH = 121·40 = 4840 мин-1
Составим программу:
Sub evol()
'ввод данных
z5 = 11
z6 = 45
m = 5
h1 = 1
c = 0.25
Worksheets(3).Range("a1") = "результаты аналитического расчета"
Worksheets(3).Range("a2") = "начальные параметры"
Worksheets(3).Range("a3") = "z5"
Worksheets(3).Range("b3") = z5
Worksheets(3).Range("a4") = "z6"
Worksheets(3).Range("b4") = z6
Worksheets(3).Range("a5") = "m"
Worksheets(3).Range("b5") = m
Worksheets(3).Range("a6") = "h1"
Worksheets(3).Range("b6") = h1
Worksheets(3).Range("a7") = "c"
Worksheets(3).Range("b7") = c
For i = 1 To 21
Worksheets(3).Cells(i + 8, 1).Value = i
Next i
'вычисление
Worksheets(3).Range("b8") = "полученные значения"
Worksheets(3).Range("c8") = "шестерня 5"
Worksheets(3).Range("d8") = "колесо 6"
Worksheets(3).Range("b9") = "суммарное число зубьев z"
z = z5 + z6
Worksheets(3).Range("c9") = z
Worksheets(3).Range("b10") = "min коэффициент смещения X"
x5 = (17 - z5) / 17
x6 = -x5
Worksheets(3).Range("c10") = x5
Worksheets(3).Range("d10") = x6
Worksheets(3).Range("b11") = "угол профиля исходного контура"
v = 20
q = 0.348888
Worksheets(3).Range("c11") = v
Worksheets(3).Range("b12") = "делительное межосевое расстояние a"
a = 0.5 * m * (z5 + z6)
Worksheets(3).Range("c12") = a
Worksheets(3).Range("b13") = "inv20"
inv = 0.0149
Worksheets(3).Range("c13") = inv
Worksheets(3).Range("b14") = "межосевое расстояние aw"
Worksheets(3).Range("c14") = a
Worksheets(3).Range("b15") = "делительная высота головки зуба ha"
ha5 = m * (h1 + x5)
ha6 = m * (h1 + x6)
Worksheets(3).Range("c15") = ha5
Worksheets(3).Range("d15") = ha6
Worksheets(3).Range("b16") = "делительная высота ножки зуба hf"
hf5 = m * (h1 + c - x5)
hf6 = m * (h1 + c - x6)
Worksheets(3).Range("c16") = hf5
Worksheets(3).Range("d16") = hf6
Worksheets(3).Range("b17") = "высота зуба h"
h = ha5 + hf5
Worksheets(3).Range("c17") = h
'диаметры
Worksheets(3).Range("b18") = "делительный диаметр d"
d5 = m * z5
d6 = m * z6
Worksheets(3).Range("c18") = d5
Worksheets(3).Range("d18") = d6
Worksheets(3).Range("b19") = "основной диаметр db"
db5 = m * z5 * Cos(q)
db6 = m * z6 * Cos(q)
Worksheets(3).Range("c19") = db5
Worksheets(3).Range("d19") = db6
Worksheets(3).Range("b20") = "начальный диаметр dw"
dw5 = d5
dw6 = d6
Worksheets(3).Range("c20") = dw5
Worksheets(3).Range("d20") = dw6
Worksheets(3).Range("b21") = "диаметр вершин зубьев da"
da5 = m * z5 + 2 * m * (h1 + x5)
da6 = m * z6 + 2 * m * (h1 + x6)
Worksheets(3).Range("c21") = da5
Worksheets(3).Range("d21") = da6
Worksheets(3).Range("b22") = "диаметр впадин зубьев df"
df5 = m * z5 - 2 * m * (h1 + c - x5)
df6 = m * z6 - 2 * m * (h1 + c - x6)
Worksheets(3).Range("c22") = df5
Worksheets(3).Range("d22") = df6
Worksheets(3).Range("b23") = "делительная толщина зубьев S"
s5 = 0.5 * 3.14 * m + 2 * m * x5 * Tan(q)
s6 = 0.5 * 3.14 * m + 2 * m * x6 * Tan(q)
Worksheets(3).Range("c23") = s5
Worksheets(3).Range("d23") = s6
Worksheets(3).Range("b24") = "основная толщина зубьев Sb"
sb5 = db5 * (3.14 / (2 * z5) + 2 * x5 * Tan(q) / z5 + inv)
sb6 = db6 * (3.14 / (2 * z6) + 2 * x6 * Tan(q) / z6 + inv)
Worksheets(3).Range("c24") = sb5
Worksheets(3).Range("d24") = sb6
Worksheets(3).Range("b25") = "начальная толщина зубьев Sw"
sw5 = s5
sw6 = s6
Worksheets(3).Range("c25") = sw5
Worksheets(3).Range("d25") = sw6
Worksheets(3).Range("b26") = "делительный шаг P"
p = 3.14 * m
Worksheets(3).Range("c26") = p
Worksheets(3).Range("b27") = "основной шаг pb"
pb = 3.14 * m * Cos(q)
Worksheets(3).Range("c27") = pb
Worksheets(3).Range("b28") = "радиус кривизны галтели r"
r = 0.4 * m
Worksheets(3).Range("c28") = r
Worksheets(3).Range("b29") = "коэффициент торцевого перекрытия e"
t5 = (((da5 / db5) ^ 2) - 1) ^ 0.5
t6 = (((da6 / db6) ^ 2) - 1) ^ 0.5
e = (z5 * t5 + z6 * t6 - (z5 + z6) * Tan(q)) / (2 * 3.14)
Worksheets(3).Range("c29") = e
End Sub
Список литературы
1Алехнович В.М.”Теория механизмов и манипуляторов”. Издательство высшая школа.1985г.
2.Машков А.А.”Теория механизмов и манипуляторов”. Издательство высшая школа.1971г.
Приложение

| исходные данные
|
| наимено- вание параметра
|
обозначение
|
единица измерения
|
значение
|
| O1-A
|
r
|
м
|
0.113
|
| О1-О2
|
e
|
м
|
0.35
|
| B-O2
|
r1
|
м
|
0.7
|
| y
|
y
|
м
|
0.14
|
| BC
|
l
|
м
|
0.21
|
| w1
|
w1
|
с
|
13.80
|
| угол размаха
|
b
|
рад
|
0.87266
|
| результаты вычислений
|
| угол поворота
|
перемещение
|
скорость
|
ускорение
|
| 0
|
-0.004922
|
-0.00083
|
5.38194
|
| 0.5236
|
0.0141113
|
0.60678
|
3.80533
|
| 1.0472
|
0.0561586
|
0.865058
|
2.90399
|
| 1.5708
|
0.1068522
|
0.935913
|
1.44724
|
| 2.0944
|
0.1582127
|
0.898178
|
-0.2797
|
| 2.61799
|
0.2054088
|
0.789663
|
-1.6989
|
| 3.14159
|
0.2447813
|
0.613949
|
-2.4693
|
| 3.66519
|
0.2716014
|
0.3239
|
-2.9936
|
| 4.18879
|
0.275994
|
-0.23141
|
-3.9887
|
| 4.71239
|
0.235559
|
-1.32772
|
-4.7289
|
| 5.23599
|
0.128899
|
-2.26762
|
2.34036
|
| 5.75959
|
0.0256355
|
-1.20752
|
6.53008
|
| 6.28319
|
-0.004922
|
-0.00083
|
5.38168
|
| результаты аналитического расчета
|
| начальные параметры
|
| m3
|
6
|
| m4
|
70
|
| m5
|
120
|
| полученные значения
|
| N
|
u3
|
mu3
|
u4
|
mu4
|
u5
|
| 0
|
-57.2731
|
-2.34731
|
-114.527
|
17.41795
|
-1.1E+07
|
| 1
|
-164.798
|
-6.93282
|
-337.12
|
50.99269
|
-1.6E+08
|
| 2
|
-276.534
|
-11.8008
|
-569.925
|
85.85486
|
-3.5E+08
|
| 3
|
-274.011
|
-11.6716
|
-564.147
|
84.71694
|
-4E+08
|
| 4
|
-144.589
|
-5.97045
|
-293.037
|
43.71576
|
-2.5E+08
|
| 5
|
-14.8626
|
0.344928
|
-18.0173
|
-1.93163
|
-5.5E+07
|
| 6
|
-27.7479
|
0.975466
|
-49.8168
|
-7.57031
|
-8453251
|
| 7
|
-108.177
|
-5.36884
|
-240.551
|
36.11039
|
-1.7E+08
|
| 8
|
-270.175
|
-12.9273
|
-589.596
|
88.70336
|
-3.8E+08
|
| 9
|
-305.491
|
-14.5559
|
-664.985
|
100.0586
|
-4.3E+08
|
| 10
|
-193.961
|
-9.33578
|
-424.105
|
63.86084
|
-2.6E+08
|
| 11
|
-67.0119
|
-3.22456
|
-145.531
|
22.04901
|
-5.8E+07
|
| 12
|
-56.9106
|
-2.33274
|
-113.79
|
17.30617
|
-1.1E+07
|
| результаты аналитического расчета
|
| начальные параметры
|
| z5
|
12
|
| z6
|
40
|
| m
|
5
|
| h1
|
1
|
| c
|
0.25
|
| полученные значения
|
шестерня 5
|
колесо 6
|
| 1
|
суммарное число зубьев z
|
52
|
| 2
|
min коэффициент смещения X
|
0.2941177
|
-0.294
|
| 3
|
угол профиля исходного контура
|
20
|
| 4
|
делительное межосевое расстояние a
|
130
|
| 5
|
inv20
|
0.0149
|
| 6
|
межосевое расстояние aw
|
130
|
| 7
|
делительная высота головки зуба ha
|
6.4705887
|
3.5294
|
| 8
|
делительная высота ножки зуба hf
|
4.7794117
|
7.7206
|
| 9
|
высота зуба h
|
11.25
|
| 10
|
делительный диаметр d
|
60
|
200
|
| 11
|
основной диаметр db
|
56.385206
|
187.95
|
| 12
|
начальный диаметр dw
|
60
|
200
|
| 13
|
диаметр вершин зубьев da
|
72.941177
|
207.06
|
| 14
|
диаметр впадин зубьев df
|
50.441177
|
184.56
|
| 15
|
делительная толщина зубьев S
|
8.9199084
|
6.7801
|
| 16
|
основная толщина зубьев Sb
|
9.2226541
|
9.1721
|
| 17
|
начальная толщина зубьев Sw
|
8.9199084
|
6.7801
|
| 18
|
делительный шаг P
|
15.7
|
| 19
|
основной шаг pb
|
14.754129
|
| 20
|
радиус кривизны галтели r
|
2
|
| 21
|
коэффициент торцевого перекрытия e
|
1.5002282
|
[C1]
ω
|
