Міністерство освіти та науки України
Вінницький національний технічний університет
Інститут автоматики, електроніки та комп’ютерних систем управління
Факультет автоматики та комп’ютерних систем управління
Кафедра Метрології та промислової автоматики
Курсовий проект
з курсу “Проектування випробувального обладнання та його метрологічна атестація"
КОМП’ЮТЕРНИЙ ЗАСІБ ВИМІРЮВАННЯ ТИСКУ І ТЕМПЕРАТУРИ У КЛІМАТИЧНІЙ КАМЕРІ
Виконав: ст. гр.1АМ-04
Пісковий С.В.
Перевірив: к. т. н., доц. каф. МПА
Кулаков П.І.
ВНТУ - 2009
Зміст
Вступ
1. Методи та засоби вимірювання тиску і температури
1.1 Методи вимірювання тиску
1.2 Методи вимірювання температури
2. Розробка структурної схеми комп’ютерного засобу вимірювання тиску і температури у кліматичній камері
3. Розробка електричної принципової схеми комп’ютерного засобу вимірювання тиску і температури у кліматичній камері
4. Електричні розрахунки
4.1 Електричний розрахунок джерела живлення
4.2 Електричний розрахунок тактового генератора мікроконтролера
5. Розрахунок похибки вимірювання тиску і температури у кліматичній камері
Висновок
Література
Доповнення персональних комп’ютерів (мікроЕОМ) набором змінних плат (аналого-цифровим і цифро-аналоговим інтерфейсом) перетворює комп’ютери на могутній засіб вимірювання з десятками вимірювальних функцій при відповідному програмному забезпеченні. Такі засоби вимірювання називаються комп’ютерно-вимірювальними системами (КВС).
Застосування персональних комп’ютерів (ПК) для розв’язання вимірювальних завдань визначається трьома факторами:
складом технічних засобів, що визначають конфігурацію ПК;
наявністю перетворювачів (АЦП, ЦАП тощо), конструктивно сумісних із системним каналом ПК;
обсягом відповідного програмного забезпечення (як системного, так і прикладного), орієнтованого на розв’язання даного вимірювального завдання.
Більше того, КВС за потенціальними можливостями значно багатша свого попередника - вимірювального приладу. Будучи забезпеченою комплектами плат відповідного призначення, а також необхідним складом програмного забезпечення, персональна ЕОМ стає багатоцільовою вимірювальною системою. Маючи розвинене програмне забезпечення у вигляді спеціалізованих операційних систем із мовами високого рівня, векторну систему переривання, засоби прямого доступу до пам’яті, єдиний системний канал, набір уніфікованих інтерфейсів, можна організувати складні системи з управлінням в реальному масштабі часу.
Реклама

Вимірювання і реєстрація тиску широко розповсюджені як в промисловості, так і в повсякденному житті: метеорологічні барометри показують атмосферний тиск, медичні тонометри - тиск у манжеті. Не слід забувати і о висотомірах (альтиметрах), які, по суті, представляють собою ті ж самі барометри, але зі спеціальною шкалою.
Практично усі сенсори тиску відносяться до класу параметричних перетворювачів. У параметричних перетворювачах неелектрична величина перетворюється на приріст параметра електричного кола (R, L, C, M), тому особливістю роботи таких перетворювачів є потреба в додатковому джерелі енергії. Основними видами параметричних перетворювачів, які застосовуються при вимірюванні тиску є тензорезистивні, ємнісні і індуктивні сенсори. Проте інколи використовуються і генераторні перетворювачі. У генераторних перетворювачах вхідна величина перетворюється у вихідний сигнал, який має енергетичні властивості.
Тензометричний сенсор або тензометр - це резистивний елемент, електричний опір якого змінюється при механічній деформації. Це явище називається п’єзоефектом. Деформація може бути повздовжньою, поперечною або деформацією форми.
В основу принципу їх дії покладена зміна активного опору провідника при його деформації. Це підтверджується наступною формулою:
 (1.1) (1.1)
В більшості тензометричних сенсорів використовують чотири тензометра, які утворюють схему моста Уітстона.
Широко застосовувані нині наклеювані дротові тензорезистори - це тонкий зигзагоподібний дріт, який наклеюється на еластичну смужку (підкладку). Тензорезистори наклеюються на досліджуваний об’єкт так, щоб вони разом із ним зазнавали деформації стискання або розтягування.
Принципово нові можливості у розвитку тензорезисторних датчиків на основі напівпровідникових чутливих елементів відкрилися з розробкою і дослідженням структур типу “кремній на діелектрику". Із них найбільш вивчена і технологічно освоєна структура “кремній на сапфірі". Це тонка монокристалічна плівка кремнію, вирощена на монокристалічній сапфіровій підкладці з певною кристалографічною орієнтацією. Такі перетворювачі мають хороші пружні властивості, малу похибку гістерезису, широкий діапазон вимірюваних деформацій.
Реклама

В ємнісних перетворювачах використовується залежність ємності конденсатора від розмірів, взаємного розміщення його обкладинок і діелектричної проникності середовища між ними.
В ідеальному випадку ємність плоского конденсатора
 (1.2) (1.2)
З цієї формули випливає, що ємність плоского конденсатора збільшуватиметься при зростанні діелектричної проникності середовища e і площі пластин S і зменшуватиметься зі збільшенням відстані між пластинами d. Отже, всі фізичні величини, які безпосередньо або через допоміжні фактори будуть впливати на змінні e, S і d, можна виміряти за допомогою ємнісних датчиків. Останні можуть мати найрізноманітніше конструктивне виконання: дві чи три плоскі пластини, циліндр у циліндрі тощо.
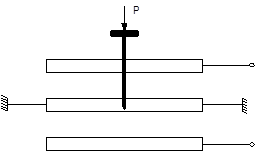
Рисунок 1.1 - Ємнісний перетворювач
Таким чином, під ємнісним датчиком розуміють систему електродів, ємність яких однозначно залежить від значення заданої фізичної величини.
Чутливість ємнісних перетворювачів з площинними електродами є лінійною функцією зміни площі взаємодії електродів і зміни діелектричної проникності середовища між ними:
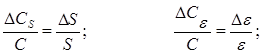 (1.3) (1.3)
У той самий час чутливість відносної відстані між електродами є нелінійною функцією:
 (1.4) (1.4)
Основні переваги ємнісних датчиків - висока чутливість; відсутність рухомих деталей, які труться; простота конструкції; мала інерційність. До їх недоліків слід віднести вплив зовнішніх електричних полів, паразитних ємностей, температури і вологості.
Індуктивні перетворювачі із змінною довжиною повітряного зазора, в них використовується залежність індуктивності L від довжини повітряного зазора d. Якщо знехтувати опором магнітопровода, незначним порівняно з магнітним опором зазора, а також втратою потужності в магнітопроводі, то одержимо
 , (1.5) , (1.5)
де m0
- магнітна постійна;
w - число витків котушки;
S - ефективна площа повітряного зазора.
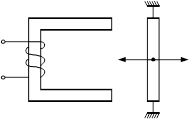
Рисунок 1.3 - Індуктивний перетворювач із змінною довжиною повітряного зазора
Як наслідок індуктивний перетворювач із змінною довжиною повітряного зазора є нелінійним перетворювачем, залежність L від довжини зазора d близька до гіперболічної.
З достатнім для практики рівнем наближення можна вважати його лише при малих відносних змінах довжини повітряного зазора Dd/d. У реальних конструкціях перетворювачів відносна зміна зазора Dd/d = 0,1...0,15 при нелінійності характеристики 1-3%. Тому такі перетворювачі застосовуються для перетворення невеликих тисків, сил і переміщень.
Диференціальні індуктивні перетворювачі. Значне поліпшення лінійності при одночасному збільшенні чутливості досягається в диференціальних перетворювачах із двома перетворювальними елементами, що мають загальну рухому частину. У них рухомий якір розміщено симетрично відносно обох осердь із початковим зазором , і магнітні опори для потоків, що створюються двома котушками, однакові. Зміна магнітних опорів, що проходить при переміщенні Dd якоря, мають протилежні знаки. При зустрічно-послідовному вмиканні обмоток їх сумарна індуктивність
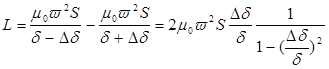 (1.6) (1.6)
Внаслідок того, що в знаменнику останнього виразу відношення Dd/d знаходиться в квадраті, в диференціальному перетворювачі лінійність характеристики забезпечується в більш широких межах. Через це практично усі індуктивні перетворювачі виконуються диференціальними.
Індуктивні перетворювачі із змінною площею повітряного зазору застосовуються для перетворення переміщень рухомого феромагнітного осердя в діапазоні 5...20 мм. Функція перетворення таких перетворювачів практично лінійна.
Індуктивні перетворювачі плунжерного типу найбільш поширені. В основу дії цих перетворювачів покладено зміну магнітного опору ділянок розсіювання магнітного потоку, а отже, й індуктивності котушки при переміщенні феромагнітного рухомого елемента (плунжера) всередині котушки. Найчастіше застосовуються диференціальні плунжерні перетворювачі з магнітопроводом. Плунжерні перетворювачі мають, як правило, лінійні характеристики і забезпечують перетворення переміщень від кількох міліметрів до кількох десятків сантиметрів.
В залежності від технології, що використовується, сенсор тиску без електронної частини може бути і дуже дорогим, і відносно дешевим. Економічні сенсори, побудовані на основі кристалу кремнію, були настільки вдосконалені, що тепер параметри професійного рівня можна отримати, придбавши виріб приблизно за 25 доларів. Такий сенсор складається з двох основних частин: герметичного корпуса, зазвичай оснащеного штуцерами, які дозволяють під’єднувати гнучкі трубки, і дуже незвичайного напівпровідникового кристала. На одній і тій самій кремнієвій пластині виконані і класичні електронні компоненти, і струнні сенсори натягу.
Революційна ідея полягає у тому, що сама пластина, певна частина якої зроблена дуже тонкою за допомогою мікрообробки, відіграє роль мембрани, яка деформується під впливом тиску.
Перші сенсори, виготовлені за цією технологією, давали не дуже добрі показники. У них був відчутний температурний дрейф, а також значний зсув нуля, який сильно змінювався від зразка до зразка. Електронні пристрої корекції, на щастя, могли суттєво згладити ці недоліки, а на сьогоднішній день стан значно покращився.
Виконання на одній пластині, окрім струнних сенсорів натягу, терморезисторів і резисторів з лазерною підгонкою дозволяє виробникам створювати і випускати вже калібровані і термокомпенсовані сенсори. Використовувати їх дуже просто: достатньо подати постійну напругу на одну діагональ моста, який складається з струнних сенсорів натягу, і знімати з іншої діагоналі цього моста напругу, пропорційну прикладеному тиску.
Сенсори як цього так і інших типів випускає фірма Motorola, яка є ведучим виробником сенсорів тиску. Фірма Motorola пропонує велику кількість сенсорів, які відрізняються підвищеною стійкістю до дії агресивних речовин, високою точністю вимірювань в широкому діапазоні температур, малими габаритами.

Рисунок 1.4 - Сенсори тиску фірми Motorola
Важливою перевагою сенсорів фірми Motorola є те, що більшисть із них термокомпенсовані, тобто вони мають однакову точність первинного перетворення в широкому диапазоні температур. Окрім того вони мають вбудовану мостову схему і буфер, що дозволяє отримати на виході сигнал постійної напруги, прямо пропорційний тиску, або послідовність імпульсів, шпаруватість яких є інформативним параметром вихідного сигналу сенсора. Для розробки приладу обираємо термокомпенсований тензоперетворювач тиску фірми Motorola MPX1986. Вихідним сигналом цього сенсора є послідовність імпульсів, шпаруватість яких прямо пропорційна тиску.
В сучасному промисловому виробництві, наукових дослідах, при дослідженнях матеріалів і зразків найбільш розповсюдженими є виміри температури. Широкий діапазон вимірювальних температур, різноманітність умов використання засобів вимірювання і вимог до них визначають, з одного боку, різноманітність використовування засобів вимірювальної температури, а з другої сторони, необхідність розробки нових типів первинних перетворювачів.
Температура поряд з тиском і обсягом являє собою одну з трьох основних величин, що характеризують термодинамічний стан речовини, і безпосередньо пов'язана з його внутрішньою енергією. Практично немає жодної галузі діяльності людини, де б не вимагалося вимірювати і регулювати температуру, тому вона є однією з найбільш часто вимірюваних фізичних величин. Температура - це статистичне поняття, яке приміняється до систем, які складаються з великого числа часток, що знаходяться в тепловій рівновазі. Енергія часток, усереднена по їхньому числу, і визначає температуру системи (об'єкту).
Температура (temperature) латинське слово, що означає "суміш". При взаємодії двох рівно зважених систем, що мають різні температури, відбувається перехід енергії від системи з більшим енерговмістом в систему з меншим енерговмістом, доки обидві системи не приймуть новий стан рівноваги. Спільним для усіх видів часток первісно поділених систем є температура.
Діапазон температур, що вимірюється надто великий. Шляхом розчинення гелію 3
Не в звичайному рідкому гелії 4
Не досягнута температура 0.001 К. Методами магнітного охолоджування одержана температура 0.000016 К. Верхня межа існуючих температур практичні не обмежена. Як припускають, на початку розвитку Всесвіту існувала надто гаряча плазма з температурою 4 1031
К. Зараз практично необхідно вимірювати температури порядку 108
К і більше, що мають місце в гарячій плазмі та при термоядерних реакціях. 1031
К. Зараз практично необхідно вимірювати температури порядку 108
К і більше, що мають місце в гарячій плазмі та при термоядерних реакціях.
Діапазон існуючих температур можна поділити на ряд характерних піддіапазонів: наднизькі температури (0-4,2 К), низькі (4.2-273 К), середні (273-1300 К), високі (1300-5000К) та надвисокі (від 5000 К і вище). Наднизькі і низькі температури необхідно вимірювати при проведенні різноманітних фізичних експериментів, і особливо при дослідженні надпровідності та її технічному застосуванні, у криогенній техніці та ін. За верхню межу надто низьких температур умовно прийнята температура, при якій провідники переходять у надпровідний стан. Найбільш часто температури, що вимірюються лежать в області низьких, середніх та високих температур. Такі виміри мають місце у різноманітних галузях народного господарства, при наукових дослідженнях, в медицині та ін.
Потреба у вимірі надто високих температур безупинно зростає, особливо у зв'язку з розвитком плазмених методів обробки матеріалів, ракетної та космічної техніки, а також при дослідженні управляємих термоядерних реакцій. Діапазон надвисоких температур починається приблизно з 4000-5000 К, тобто з температур, при яких всі речовини при нормальному тиску переходять у газоподібний стан. Температури, які находяться на початку діапазону надвисоких температур (4000-20000К), мають місце при слаботочних електричних дугових розрядах, в газорозрядних лампах, у ракетних двигунах, на поверхні Сонця (приблизно 6000 К), на тепловому щиті космічних апаратів, в плазмотронах для обробки матеріалів (5000-20 000 К) і т. ін.
Температури порядку 5×104
-105
К мають місце в стаціонарних електричних дугах і надзвукових потоках плазми, при короткочасних електричних розрядах у фокусі плазми. При ядерних реакціях, всередині Сонця та зірок температури досягають 108
К. Ще більш високі температури спостерігаються при неконтрольованих термоядерних реакціях (водневабомба).
Необхідно відзначити, що температура належить до фізичних величин, точність виміру яких ще невелика. При проведенні наукових досліджень, в частковості при визначенні фундаментальних фізичних констант, необхідно вимірювати температуру з похибкою10-2
-10-4%
. У промисловості також існує потреба у підвищенні точності виміру температури. Зараз промислові прилади забезпечують вимір температури з похибкою 0.5-1% і більше. Підвищення точності виміру температури, наприклад, при розливі стали на 0.1% дасть можливість поліпшити на 5-10% якісні показники сталі.
Різноманітні засоби вимірювання температури можна поділити за типом первинних вимірюючих перетворювачів.
В діапазоні низьких і середніх температур використовуються в основному контактні методи вимірювання, причому найбільш широко на практиці використовуються первинні перетворювачі в виді термометрів опору і термопар. При цьому необхідно враховувати, що в більшості випадків температуру необхідно вимірювати в багатьох точках об’єкту і дистанційно, тобто первинні перетворювачі можуть бути віддалені від вторинного вимірювального приладу на великі відстані.
Частіше всього включаються в зрівноважену мостову схему. Зрівноваження моста здійснюється за допомогою потенціометра. При вимірюванні опір резистора Rt
, відповідно змінюється положенням потенціометра R і на його шкалі формуються показання мостового термометру
 (1.7) (1.7)
де R1
, R2
- опори одинарного мосту.
Недоліком такої (двохдротової) схеми включення термометра опору є суттєва похибка, що вноситься опорами Rл1,
Rл2
провідників, якими він підключений до мостової схеми.
При вимірюванні температури навколишнього середовища проходить зміна опорів проводів, що робить неможливим компенсацію вказаної похибки. Для зниження цієї похибки використовують трипровідну схему підключення термометрів опору. В цьому випадку опори проводів Rл1,
Rл2
виявляються не в одній, а в різних (сусідніх) плечах моста і тому їх вплив суттєво зменшується. При симетрії моста їх опори віднімаються. Опір Rл3
, третього провідника виявляється ввімкненим в коло джерела живлення і на результат вимірювання не впливає.
При збільшенні довжини лінії зв’язку, описані методи часто не дозволяють забезпечити високу точність вимірювання температури і виникає необхідність в попередньому перетворенні опору терморезистора в який-небудь параметр електричного сигналу, що забезпечує точну і завадостійку передачу вимірювальної інформації.
При використанні термоелектричних перетворювачів (термопар) виникає необхідність вимірів значення термо-ЕРС на виході термопари. Під час вимірювання температури вільні кінці термопари повинні бути при постійній температурі. Вільні кінці термопари конструктивно виведено на клеми для розміщення їх поблизу до об’єктів, тобто в зоні вимірюваної температури. Щоб віднести ці кінці в зону постійної температури, використовуються подовжувальні провідники, що складаються з двох жил, які виготовлено з металів чи сплавів і які мають однакові термоелектричні властивості з термоелектродами термопари. В лабораторних умовах температура вільних кінців термопари підтримується рівною 0 0
С шляхом розміщення їх в ємності Д'юара, наповненій потовченим льодом з водою. В промислових умовах температура вільних кінців термопари звичайно відрізняється від 0 0
С. Оскільки градуювання термопар виконується при температурі вільних кінців 0 0
С, то ця різниця може бути джерелом суттєвої похибки. Для зменшення цієї похибки необхідно ввести поправку в покази термометра. Проте необхідно мати на увазі, що функція перетворення термопари нелінійна, а відповідно, значення поправки повинно залежати не тільки від температури вільних кінців термопари, але і від значення вимірюваної температури. Ця обстава ускладнює точну корекцію вказаної похибки шляхом введення поправки. Широке застосування на практиці має автоматичне введення поправки на температуру вільних кінців термопари, що наведено на рис.1 В коло термопари ТП і мілівольтметра включено міст, одним з плечей якого є терморезистор Rt
(мідний), який розміщено біля вільних кінців термопари.
Інші плечі моста створено низькоомними резисторами R2
, R3
, R4
. При температурі вільних кінців термопари, рівній 0 0
С, міст зрівноважений (Uab
= 0). При відхиленні температури вільних кінців термопари від 0 0
С напруга Uab
не дорівнює нулю і сумується з ЕРС термопари, що вносить поправку d в показання приладу.
Значення поправки регулюється резистором RS
. В наслідок нелінійності функцій перетворення термопари повної компенсації похибки не виконується, але вказана похибка значно зменшується.
В даному випадку автоматична корекція похибки здійснюється методом допоміжних вимірювань, причому термометр опору є допоміжним вимірювальним перетворювачем, а поправка вводиться шляхом сумування напруг.
Останнім часом для виміру температур все більшого розповсюдження набувають кварцові термоперетворювачі, які мають високу розрізнювальну здатність і широкий частотний діапазон, добре захищені від завад і легко перетворюються в цифровий двійковий код.
Такі перетворювачі засновані на використанні прямого єзоелектричного ефекту, що полягає у виникненні електричних зарядів на поверхні деяких кристалів (кварцу, сегнетової солі і ін.) під дією механічних напруг.
З кристалу кварцу вирізається пластина, грані якої повинні бути перпендикулярні оптичній осі Z, механічній Y і електричній X (рис.2)
Під дією на пластину зусилля FX
на гранях Х ç¢являються заряди
 , (1.7) , (1.7)
де к - єзоелектричний коефіцієнт.
Під час дії на пластину зусилля FY
вздовж механічної осі, на тих же гранях виникають заряди
QY
= (a/b) k FY, (
1.8)
де а,b - розміри граней пластини.
Механічна дія на пластину вздовж оптичної осі не викликає появи зарядів.
При вимірювані температури, знаходять застосування п'єзорезонатори, в яких використовується одночасно прямий і зворотній п'єзоефекти. Останній полягає в тому, що якщо на електроди перетворювача подати змінну напругу, то в єзочутливому елементі (пластині) виникнуть механічні коливання, частота яких fР
(резонансна частота) залежить від товщини h
пластини, модуля пружності Е
, густини r її матеріалу. При включенні такого перетворювача в резонансний контур генератора частоти, частота генерованих електричних коливань визначається як fР
. Рівняння перетворення кварцового перетворення має вигляд
ft
= fp
+ S tx
o
,
(1.9)
де fp
, ft
- відповідно частоти генерованих коливань при температурах t0
= 0
0
C і вимірюваній температурі tх
0
;
S - чутливість термоперетворювача.
Чутливість кварцових термоперетворювачів досягає 200-1000 Гц/К, що дозволяє з їх допомогою визначати зміни температури порядку 0,001 - 0,01 0
С. Кварцові термометри можуть функціонувати в діапазоні температур від - 200 0
С до +600 0
С.
Висока точність кварцових термометрів пояснюється високою стабільністю параметрів перетворювача і високими метрологічними характеристиками вимірювачів частоти. Недоліком таких перетворювачів є обмежена взаємозамінюваність, що пояснюється розкидом параметрів f0
і S
.
Контактні методи і засоби вимірів застосовуються для виміру температур в діапазоні від значень, близьких до абсолютного нуля, до 1500 о
С. В окремих випадках, використовуючи термоперетворювачі з тугоплавких матеріалів або квазідотиковий метод виміру, при якому термоперетворювач на короткий час поміщується в середовище, що вимірюється, можна підвищити верхню межу вимірів до 2500-3000 о
С.
З контактних методів виміру найбільш широке застосування одержали термоелектричний і терморезистивний методи. Інші контактні термометричні методи головним чином використовуються при наукових дослідженнях чи для відтворення температурної шкали. Термоелектричні та терморезистивні термометри широко застосовуються для виміру температури у виробничих умовах, при наукових дослідженнях. Переваги цих методів і відповідних засобів вимірів полягають в їхній простоті, надійності, низької вартості і можливості отримання високої точності вимірів. Крім Того, використовуючи контактні методи, можна легко створити багатоканальні вимірювальні системи для безупинного виміру параметрів температурного поля складних об'єктів, в тому числі при високих тисках і в труднодоступних місцях. Основні характеристики промислових терморезисторів і термопар, а також вимірювальні ланцюга термометрів опору та термоелектричних термометрів розглянуті в роботі [5].
При використанні термоелектричного та терморезистивного методів задача виміру температури зводиться до точного виміру відповідно ЕРС в діапазоні 0.1-200 мВ або опорі від часток Ома до десятків і сотень Ом. Ці задачі успішно вирішуються застосуванням сучасних засобів вимірів означених величин. Використання серійно підсилювачів, що випускаються вимірювальних й автоматичних реєструючих мостів та компенсаторів з покращеними характеристиками, цифрових мілівольтметрів, перетворювачів опору в цифровий код, а також мікропроцесорних приладів для корегування похибки термоперетворювачів забезпечує утворення засобів вимірів температури з надто низькими інструментальними похибками (0.1-0.5%). Так, відомі цифрові термоелектричні термометри з здібністю 0.1 К, що є основну похибки ±1% в діапазоні 4-2000 К і ±0,2% в діапазоні 73-2000 К. При відтворенні МПТШ застосовуються зразкові термометри, що забезпечують вимір температури між реперними точками з похибкою ±0, 001%. Однак навіть при використанні точних приладів похибка вимірів температури можуть сягати більших значень з-за наявності методичних похибок, спричинених самою суттю та принциповими особливостями контактних методів вимірів температури. Головне полягає в тому, що всі контактні методи засновані на перетворенні в сигнал вимірювальної інформації будь-якої термометричної властивостітермоперетворювача, а не об'єкту дослідження. Тому всі засоби вимірів, основані на цих методах, принципово вимірюють температуру термоперетворювача (вірніше, його дошкульного елементу), що в загальному випадку не рівна температурі об'єкту.
Крім того, при контактних методах вимірів температури вагоме значення має похибка, спричинена взаємодією об'єкту та засобу виміру, особливо якщо останнє використовується лише для періодичних вимірів та не є штатним приладом даного об'єкту. При поміщенні термоперетворювача в досліджуєме середовище, або у поверхні об'єкту завідомо порушується їхнє температурне поле як за рахунок власного споживання (чи віддання) теплової енергії термоперетворювачем, так і за рахунок теплообміну між об'єктом і навколишньою середою через термоперетворювач.
Як недолік контактних методів можна відмітити відносно великі динамічні похибки, спричинені значною тепловою інерційністю термоперетворювачів, постійні часу яких складають 10-60 та понад. Іншими недоліками є обмежена зверху межа виміру (1500-2500 о
С), труднощі при вимірі температури рухомих об'єктів, а також порушення теплового та технічного стану поверхні, що досліджується. Від цих недоліків хвилі пірометричні та спектрометричні методи виміру температури.
Термомагнітний метод заснований на залежності магнітної сприйнятливості парамагнітних речовин або ядерної магнітної сприйнятливості від температури. У відповідності з законом Кюрі-Вейса магнітна сприйнятливість зворотньо пропорційна абсолютній температурі:
 , (1.10) , (1.10)
де С-
коефіціент, пропорційний константі Кюрі;
а-
поправка, що залежить від форми зразка, щільності і взаємодії іонів,
d
-
поправка, що враховує штарковське розчіплення та диполь-дипольну взаємодію.
Вимір температури термочастотними методами оснований на використанні залежності від температури частоти власних коливань різного роду резонаторів, швидкості розповсюдження звукових та ультразвукових коливань та параметрів частотно-залежних RC -
або RL-
цепей з терморезистором.
Найбільш розвинуті резонансні термочастотні методи, основані на застосуванні резонаторних датчиків, що являють собою автогенератори чи генератори з вимушеними коливаннями, частота яких настроюється в резонанс з частотою власних коливань резонатора, що змінюється з температурою.
Для виміру температури застосовуються механічні, газові та ядерні резонатори. Характеристика перетворення температури в частоту у таких резонаторів нелинійна. Рівняння перетворення термометрів з резонаторними перетворювачами на робочій ділянці характеристики можна представити у вигляді полиному
 , (1.11) , (1.11)
де коефіцієнти a, b та g вибираються в залежності від виду і характеристик резонаторів. При використанні кварцевих резонаторов похибка линійності надто незначна. У інших випадках для лінеаризації характеристики приладу необхідні додаткові прилади з функціональними перетворювачами. Розвиток мікропроцесорної техніки дозволяє створювати точні частотні термометри з похибкою лінійності не більш 10-5
.
Пірометричні методи вимірів температури охоплюють широкий діапазон температур - від 173 до 6000 К, включаючий в себе низькі, середні та високі температури. Ці методи засновані на визначенні параметрів теплового випромінювання об'єкту без порушення його температурного поля. Теплове випромінювання являє собою электромагнітне випромінювання, збуджуване тепловим рухом атомів і молекул в твердих, рідких та газоподібних речовинах. При температурах вище 4000 К випромінювання викликається процесами дисоціації, та іонізації.
Спектрометричні методи застосовуються для вимірів надвисоких температур - вище 4000 К, при яких всі речовини знаходяться в стані плазми. Тому спектрометричні методи тісно пов'язані з фізикою та діагностикою плазми.
Спектрометричні методи можна поділити на пасивні та активні. Пасивні методи засновані на визначенні різних параметрів спектру випромінювання плазми, при якому процес виміру не впливає на величину, що вимірюється.
При використанні активних методів плазма облучається зовнішнім электромагнітним випромінюванням та її температура визначається по абсорбції, розсіюванню або швидкості розповсюдження зовнішнього випромінювання в середовищі що досліджується. Впливом зовнішнього випромінювання не завжди можна зневажити.
Плазма, полягати в основному з молекул, атомів, іонів та вільних электронів, характеризується рядом температур: молекулярною, атомною, іонною, електронною, температурою збудження та ін. Перші три температури тісно зв'язані та характеризують температуру газу.
Випромінювання плазми складається здебільшого з ліній, та лише дуже малу частину складає безперервний спектр; тому пряма пірометрія для виміру температури плазми не може бути застосована. Вирішити, чи є зміряна температура газової або електронною, можна тільки, якщо відомий механізм випромінювання на даній довжині хвилі l та яким часткам - тяжким чи легким - належить випромінювання.
Найбільш розповсюджений пасивний метод визначення температури плазми заснований на вимірі інтенсивності молекулярних, атомних або іонних спектральних ліній, для яких відомі теоретичні залежності між інтенсивністю спектральних ліній та температурою.
В теперішній час все більшого розповсюдження набувають інтегральні первинні вимірювальні перетворювачі температури, які як правило використовуються для діапазону температур від - 800
до +2500
С.
Ці перетворювачі виготовляються такими провідними світовими виробниками як Analog Devices, Motorola, Intersil (Harris), та інші. Вихідним сигналом таких перетворювачів є напруга, яка лінійно залежить від вимірюваної температури, або імпульсний сигнал, інформативним параметром якого є частота або шпаруватість імпульсів.
Для контролю температури віддалених об’єктів доцільно використовувати термоперетворювачі з імпульсним вихідним сигналом. Це зумовлене наступними причинами:
аналоговий вихідний сигнал термоперетворювача для передачі на великі відстані необхідно перетворювати в цифровий код, тому як цифровий сигнал має набагато більшу завадостійкість, ніж аналоговий;
цифровий сигнал зручно перетворювати у сигнал інтерфейсу RS-485 або RS-422, які призначені для передачі даних на великі відстані;
інтегральні напівпровідникові термоперетворювачі як правило виконуються у невеликих за розмірами корпусами і легко встановлюються на об’єкті;
інтегральні напівпровідникові термоперетворювачі мають мале енергоспоживання, що дозволяє використовувати їх локальне акумуляторне живлення.
На рис.2.1 наведено структурну схему комп’ютерного засобу вимірювання тиску і температури у кліматичній камері.
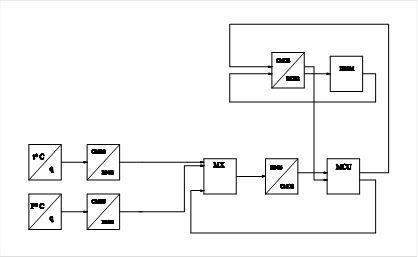
Рисунок 2.1 - Структурна схема комп’ютерного засобу вимірювання тиску і температури у кліматичній камері
Принцип дії системи, яка розроблюється у курсовому проекті, полягає у наступному.
Первинний вимірювальний перетворювач температури або тиску перетворює температуру або тиск, у шпаруватість вихідних імпульсів, тобто в даному випадку, шпаруватість вихідних імпульсів перетворювача є функцією температури або тиску.
Сучасні напівпровідникові перетворювачі температури виконуються на основі КМОП (англійська абревіатура CMOS) технології, що забезпечує ультранизьке споживання пристроїв. Внаслідок того, що відстань між об’єктом та комп’ютером, згідно умов технічного завдання, складає не менше 1500 м, недоцільно використовувати загальну мережу живлення для всіх термоперетворювачів. Тому в подальшому будемо проектувати систему виходячи з того, що перетворювачі живляться від локального джерела живлення, яке знаходиться у безпосередній близькості до об’єкта, або від акумуляторної батареї.
Згідно умов технічного завдання, для передачі даних на велику відстань необхідно використовувати інтерфейс RS-485, який спеціально для цього призначений. Згідно специфікації цього інтерфейсу, він має негативну логіку, формат передачі даних - вісім або сім біт даних, один стартовий біт, два стопових біта, біт парності. Сигнали передаються у вигляді струму по двопровідній вітій парі з екраном, відстань передачі даних - до 2000 м. Для перетворення CMOS - рівнів в сигнали RS-485, використовується спеціалізований перетворювач, як це наведено на структурній схемі.
Для перетворення симетричного вихідного сигналу мультиплексора у несиметричний сигнал CMOS - рівнів, який необхідний для роботи мікроконтролера, використовується відповідний перетворювач, як вказано на структурній схемі системи. Вихідний сигнал перетворювача подається на вхід мікроконтролера, який вимірює шпаруватість вихідних імпульсів первинного перетворювача температури і розраховує температуру згідно рівняння перетворення використовуємого датчика. Окрім того мікроконтролер здійснює керування диференційним мультиплексором, тобто формує код каналу, шпаруватість сигналу якого потрібно виміряти. Керування мікроконтролером здійснюється ПЕОМ у відповідності з програмою роботи системи через послідовний порт. Для нормальної роботи послідовного порта необхідно, щоб рівень логічної одиниці бів - 12 В, рівень логічного нуля +12 В, тобто відповідно специфікації інтерфейсу RS-232. Для перетворення CMOS - рівнів на виході мікроконтролера в рівні RS-232 використовується відповідний перетворювач, як це наведено на структурній схемі.
Електрична принципова схема розробленого пристрою наведена у графічній частині курсового проекту. Пристрій розрахований на підключення двох перетворювачів, але потенційно дозволяє обробляти інформацію від восьми різних первинних вимірювальних перетворювачів без суттєвого ускладнення схеми. У якості первинного вимірювального перетворювача температури (DA1-DA8) обрано перетворювач фірми Analog Devices TMP04. Цей перетворювач має наступні технічні характеристики:
напруга живлення - 4.5 - 7 В;
трьохвивідний корпус ТО-92;
точність первинного перетворення +/ - 1.50
С;
CMOS/TTL вихідні рівні;
діапазон температур: - 40 - +150 0
С;
частота вихідного сигналу 35 Гц;
інформативний параметр вихідного сигналу - шпаруватість імпульсів;
У якості перетворювача CMOS - рівнів в сигнали інтерфейсу RS-485 обрано мікросхему ADM488 фірми Analog Devices (DD1-DD8).
Ця мікросхема уявляє собою драйвер та ресивер сигналів RS-485, тобто драйвер перетворює сигнали TTL або CMOS рівнів в формат RS-485, а ресивер перетворює сигнали RS-485 в TTL або CMOS. Основні характеристики цієї мікросхеми наступні:
напруга живлення - 4.5 - 7 В;
вісьмививідний корпус DIP або SOIC
відстань передачі даних - до 2000 м
діапазон робочих температур - 25 - +85 0
С;
струм споживання - 15 мА.
У даній системі для перетворення вихідних сигналів первинних вимірювальних перетворювачів температури використовуються тільки драйвери.
Живлення первинного вимірювального перетворювача температури і драйвера RS-485 здійснюється від локального джерела живлення, напруга якого подається через той самий роз’єм, що і вимірювальні сигнали.
Сигнали інтерфейсу RS-485 через роз’єми і віту пару поступають на вісьмиканальний аналоговий мультиплексор з диференційними входами і виходами. У якості мультиплексора обрано мікросхему ADG707 фірми Analog Devices (DA9). Основні параметри цієї мікросхеми наступні:
кількість каналів - 8;
напруга живлення - однополярна або двополярна від 3 до 18 В;
диференційні входи;
диференційні виходи;
опір у відкритому стані - 0.5 Ом
Мультиплексор має вхід вибірки. Він знаходиться в активному стані, коли на цому вході присутній рівень логічної одиниці. У нашому випадку мультиплексор постійно знаходиться в активному режимі, тому як на його вхід через резистор R9, від джерела живлення, постійно подається рівень логічної одиниці.
Вихідний сигнал мультиплексора поступає на ресивер, реалізований на мікросхемі ADM488, який здійснює перетворення сигналів RS-485 в CMOS.
Сигнали з виходу ресивера поступає на вхід мікроконтролера, з виходу якого, через перетворювач рівню, в послідовний порт ПЕОМ.
Живлення мультиплексора, ресивера, перетворювача, мікроконтролера здійснюється від послідовного порта ПЕОМ.
Для розробки приладу обираємо термокомпенсований тензоперетворювач тиску фірми Motorola MPX1986. Вихідним сигналом цього сенсора є послідовність імпульсів, шпаруватість яких прямо пропорційна тиску. Його основні технічні характеристики:
напруга живлення - 4.5 - 7 В;
точність первинного перетворення +/ - 1.5 кПа;
CMOS/TTL вихідні рівні;
діапазон температур: 0 - 1000 кПа;
частота вихідного сигналу 35 Гц;
інформативний параметр вихідного сигналу - шпаруватість імпульсів;
Живлення мікроконтролера AT90S2313, перетворювача рівнів ADM3222, мультиплексора складає 5 В. Згідно умов технічного завдання, живлення повинно здійснюватись від послідовного порта ПЕОМ.
Для живлення використовуються сигнали послідовного порта DTR та RTS, які згідно специфікації RS-232 мають навантажувальну здатність 15 мА. Ці сигнали програмно встановлюються в рівень логічного нуля, тобто напруга на цих виводах порта складає 12 В. Якщо їх з’єднати через діоди, як наведено на рис.5.1, та сумарна навантажувальна здатність джерела живлення підвищиться до 30 мА.
Для живлення мікроконтролера, перетворювача рівнів та мультиплексора необхідно використовувати стабілізовану напругу 5 В. Тому необхідно використати інтегральний стабілізатор напруги, який знизить напругу логічного нуля RS232 до рівню 5В і забезпечить стабілізоване живлення.
Для цієї мети можна використати інтегральний стабілізатор напруги фірми MOTOROLA MC7805LC. Цей інтегральний стабілізатор має наступні електричні характеристики:
вхідна напруга від 7.2 В до 35 В
вихідна напруга 5 В
максимальний струм навантаження - 1.5 А
трьохвивідний корпус.
Вхідний конденсатор цієї мікросхеми (ри.5.1) необхідний для того, щоб виключити можливість самозбудження. До виходу мікросхеми необхідно паралельно підключити два конденсатори - електролітичний та керамічний. Електролітичний - для згладжування низькочастотних пульсація, керамічний - високочастотних.
Схема електрична джерела живлення, від якого живиться мікроконтролер AT90S2313, мультиплексор ADG707, перетворювач рівнів ADM3202 наведена на рис.4.1

Рисунок 4.1 - Джерело живлення
Діоди VD1 та VD2 призначені для взаємної розв’язки сигналів DTR та RTS та сумування струмів цих сигналів. Згідно специфікації RS-232, навантажувальна здатність сигналів DTR і RTS складає 15 мА, а максимальне значення напруги рівню логічного нуля - 15 В. Відповідно розраховуємо максимальний вхідний струм інтегрального стабілізатора напруги DA1 MC7805LC:
 (мА), (4.1) (мА), (4.1)
де  -максимальний струм сигналу DTR; -максимальний струм сигналу DTR;
 - максимальний струм сигналу RTS. - максимальний струм сигналу RTS.
Максимальне зворотнє падіння напруги на діодах може виникнути в тому випадку, коли сигнали DTR і RTS знаходяться в рівні логічної одиниці і дорівнює 15 В. Максимальний струм через ці діоди не перевищує 15 мА. Виходячи з цього, обираємо діоди КД521А, у яких максимальна зворотна напруга 100 В і максимальний струм - 100 мА [8].
Падіння напруги на відкритому кремнієвому діоді складає 0.7 В. Відповідно напруга на вході інтегрального стабілізатора напруги:
 (В) (4.2) (В) (4.2)
де  - напруга рівню логічного нуля RS-232; - напруга рівню логічного нуля RS-232;  - падіння напруги на відкритому діоді. Падіння напруги на мікросхемі MC7805LC дорівнює: - падіння напруги на відкритому діоді. Падіння напруги на мікросхемі MC7805LC дорівнює:
 (В) (4.3) (В) (4.3)
де  - вихідна напруга мікросхеми MC7805LC. Потужність, яка розсіюється на мікросхемі MC7805LC дорівнює: - вихідна напруга мікросхеми MC7805LC. Потужність, яка розсіюється на мікросхемі MC7805LC дорівнює:
 (Вт) (4.4) (Вт) (4.4)
Відповідно, згідно [8], радіатор використовувати не треба, тому як для цієї мікросхеми радіатор необхідний в тому випадку, коли потужність, що розсіюється, перевищує 2 Вт. Згідно [8], для гарантованої відсутності самозбудження мікросхеми, необхідно використовувати вхідний конденсатор С1, ємністю не менше 2.2 мкФ. Обираємо конденсатор К50-35 22 мкФ х 16 В. До виходу мікросхеми необхідно паралельно підключити два конденсатори - електролітичний та керамічний [8]. Електролітичний С2 - для згладжування низькочастотних пульсація, керамічний С3 - високочастотних. Обираємо С2 - К50-35 220 мкФ х 16 В, С3 - К50-15 - 0.1 мкФ 63 В.
Робота мікроконтролера AT90S2313 тактується генератором тактової частоти з кварцевою стабілізацією. Саме генератор знаходиться в корпусі мікросхеми, зовні встановлюється кварцевий резонатор та конденсатори.
Схема включення мікроконтролера AT90S2313 наведена на рис.4.2
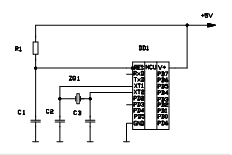
Рисунок 6.2 - Схема включення мікроконтролера АТ90S2313
RC - коло побудоване на R1 і С1 призначене для формування сигналу скидання. Обираємо кварцевий резонатор з частотою 3.6864 МГц і ємністю 2 пФ фірми GEYER. Значення ємності конденсаторів С2 і С3 обираємо виходячи із співвідношення [9]:
 , (4.5) , (4.5)
де  - ємність кварцевого резонатора. - ємність кварцевого резонатора.
Обираємо конденсатори 39 пФ х 6 В фірми ROHM типорозміру 0805.
Загальна похибка вимірювання тиску має декілька складових:
складова похибки, що зумовлена неідеальністю тензоперетворювача тиску. Згідно фірмової технічної документації на обраний тензоперетворювач, її приведене (до максимального значення вимірюваного тиску) середньоквадратичне значення не перевищує 1% і для простоти подальших розрахунків припустимо, що вона розподілена за нормальним законом розподілу. Позначимо її середньоквадратичне відхилення через  . Тому як згідно з технічним завданням максимальний тиск, що вимірюється, дорівнює 1000 кПа, то . Тому як згідно з технічним завданням максимальний тиск, що вимірюється, дорівнює 1000 кПа, то  10 кПа; 10 кПа;
складова похибки, що зумовлена перетворенням вихідного сигналу тензоперетворювача в амплітуду змінної напруги і зворотнім перетворенням. При використанні сучасної елементної бази та сучасних схемотехнічних рішень, що зроблено у даному курсовому проекті, значення цієї похибки набагато менше, ніж першої складової, і тому її значенням можна знехтувати;
складова похибки, що зумовлена випадковими завадами на лінії передачі. Її значення важко передбачити і воно залежить від конкретних умов промислового виробництва. Тому для спрощення подальших розрахунків приймемо закон її розподілу за нормальний і значення рівним значенню складової похибки, що зумовлена неідеальністю тензометричного перетворювача тиску - приведене середньоквадратичне значення дорівнює 1%. Позначимо її середньоквадратичне відхилення через  . .
складова похибки, що зумовлена квантування за допомогою аналого-цифрового перетворювача. Ця складова похибки має рівномірний закон розподілу. При великій кількості розрядів АЦП (а це справедливо у нашому випадку, n = 12), похибка квантування набагато менша за складову похибки, що зумовлена випадковими завадами і неідеальністю термокондуктометричного перетворювача. Тому її значенням і впливом її закону розподілу при визначенні достовірності контролю можна знехтувати.
Середньоквадратичне значення загальної приведеної похибки вимірювання тиску за допомогою розробленого пристрою знаходиться з виразу
 (5.1) (5.1)
Відповідно приведена середньоквадратична похибка вимірювання тиску дорівнює 1,4%, а закон її розподілу нормальний, тому як дві домінуючі складові похибки мають нормальний закон розподілу.
Загальна похибка вимірювання температури має декілька складових:
складова похибки, що є похибкою саме первинного перетворення, зумовлена неідеальністю первинного перетворювача температури TMP04. Позначимо середньоквадратичне відхилення цієї складової похибки через . Згідно з технічною документацією до первинного вимірювального перетворювача температури TMP04,  ; ;
складова похибки, що зумовлена вимірюванням тривалості рівнів логічного нуля і логічної одиниці на виході первинного вимірювального перетворювача. При використанні сучасної елементної бази та сучасних схемотехнічних рішень, що зроблено у даному дипломному проекті, значення цієї похибки набагато менше, ніж першої складової, за рахунок високої частоти квантування часових інтервалів. Тому її значенням можна знехтувати;
складова похибки, що зумовлена випадковими завадами на лінії передачі. Її значення важко передбачити і воно залежить від конкретних умов промислового виробництва. Тому для спрощення подальших розрахунків приймемо закон її розподілу за нормальний і значення рівним значенню складової похибки, що зумовлена неідеальністю первинного перетворювача температури - середньоквадратичне значення дорівнює  . Позначимо її середньоквадратичне відхилення через . Середньоквадратичне значення загальної приведеної похибки вимірювання температури за допомогою розробленого пристрою знаходиться з виразу . Позначимо її середньоквадратичне відхилення через . Середньоквадратичне значення загальної приведеної похибки вимірювання температури за допомогою розробленого пристрою знаходиться з виразу
 (5.2) (5.2)
Відповідно приведена середньоквадратична похибка вимірювання температури дорівнює 2,35%, а закон її розподілу нормальний, тому як дві домінуючі складові похибки мають нормальний закон розподілу.
В курсовому проекті розроблено комп’ютерний засіб вимірювання тиску і температури у кліматичній камері. Комп’ютерний засіб розроблений виходячи з можливості побудови на його основі системи автоматизованого управління технологічними процесами. Розроблена система отримує інформацію з двох первинних вимірювальних перетворювачів тиску і температури.
Розроблена система за усіма характеристиками відповідає умовам технічного завдання.
1. Измерения и компьютерно-измерительная техника: Учеб. пособие / В.А. Поджаренко, В.В. Кухарчук. - К.: УМК ВО, 1991. - 240 с.
2. А.Я. Кулик, С.Г. Кривогубченко, М.М. Компанець, Д.С. Кривогубченко Проектування мікропроцесорних засобів автоматики. Під загальною редакцією А.Я. Кулика. Навчальний посібник. - Вінниця: ВДТУ, 2001. - 135с.
3. Гелль П. Как превратить персональный компьютер в измерительный комплекс: Пер. с франц. - 2-е изд., испр. - М.: ДМК, 1999. - 144 с.
4. Кар Дж. Проектирование и изготовление электронной аппаратуры: Пер. с англ. - 2-е изд., стереотип., - М.: Мир, 1986. - 387 с.
5. Датчики давления фирмы Motorola // Электронные компоненты и системы. - Киев: VD MAIS, 2001. - №9. - с.8
6. www.analog.com.
|
