КОМП’ЮТЕРНЕ МОДЕЛЮВАННЯ вимірювальної системи
(курсова робота)
АНОТАЦІЯ
Пояснююча записка складається з основних розділів, які пов’язані з аналізом й обґрунтуванням теми курсової роботи, призначенням і областю застосування, описом функціональних можливостей програми, вибором технічних і програмних засобів, організації вхідних та вихідних результатів, розглядом очікуваних техніко – економічних показників та списком використаних джерел літератури при розробці програмного продукту. Пояснювальна записка містить відомості про сенсори, підсилювачі, АЦП, способи обміну даними через паралельні порти.
ЗМІСТ
Вступ
1. Призначення та область застосування
2. Технічні характеристики
2.1 Постановка задачі на розробку програми
2.1.1 Параметри та принципи роботи термопар
2.1.2 Будова і принцип роботи підсилювача
2.1.3 Аналогово-цифровий перетворювач
2.1.4 Мультиплексор
2.1.5 Паралельний порт
2.2 Опис алгоритму і функціонування програми
2.3 Опис організації вхідних та вихідних даних
2.4 Опис організації вибору технічних і програмних засобів
3. ОЧІКУВАНІ ТЕХНІКО – ЕКОНОМІЧНІ ПОКАЗНИКИ
Список використаних джерел
Вступ
Зчитування сигналу системи відбувається з термопари, далі сигнал подається на підсилювач та на АЦП. Взаємодія комп’ютера із системою вводу відбувається через паралельний порт (LPT), а для узгодження порта і АЦП використовується мультиплексор. Перелічені пристрої можна описати за допомогою математичної моделі, яка враховує основні параметри пристроїв та способи перетворення сигналу. На основі такої математичної моделі потрібно створити програму, яка моделює роботу вимірювальної системи.
Метою пояснювальної записки є ознайомлення з принципами роботи термопар, підсилювачів, АЦП, мультиплексорів, паралельного порта комп’ютера, а також з програмною реалізацією вимірювальної системи.
1. Призначення та область застосування
Розроблена програма призначена для вивчення роботи вимірювальної системи, що складається з термопари, підсилювача, АЦП, мультиплексора, паралельного порта комп’ютера. Програма може використовуватися при вивченні і закріпленні матеріалу з дисципліни „Пристрої зв’язку з об’єктом”.
2. Технічні характеристики
При вивченні роботи вимірювальної системи велика увага значенням сигналу на різних етапах обробки. Тому створена програма повинна забезпечувати зручне представлення параметрів всіх пристроїв системи і самого сигналу. Враховуючи вищенаведені обставини, можна підвищити ефективність вивчення навчального матеріалу з дисципліни „Пристрої зв’язку з об’єктом”, а цим самими покращити навчальний процес на кафедрі КСМ Чернівецького національного університету імені Ю. Федьковича.
Реклама

Розглянемо роботу пристроїв вимірювальної системи, а саме термопари, підсилювача, АЦП, мультиплексора, паралельного порта комп’ютера, більш детально.
2.1.1 Параметри та принципи роботи термопар
Термопара – це два провідника (термоелектрода), виготовлені з різних металів і сплавів, спаяні (зварені) в одній точці [1].
Чутливість термопар до температури заснована на термоелектричному ефекті (ефекті Сібека (Seebeck), по імені винайденим його в 1821 році дослідника), при якому використовується з’єднання двох матеріалів (металів і сплавів, наприклад міді і мідно-нікелевого сплавів, заліза і мідно-нікелевого сплавів чи платини і платинорідного сплавів).
Коли кінці провідника знаходяться при різних температурах, між ними виникає різниця потенціалів, пропорційна до різниці температур. Такий коефіцієнт пропорційності називають коефіцієнтом термоерс. У різних матеріалів коефіцієнт термоерс різний, тому різниця потенціалів між кінцями різних провідників буде відмінною від нуля. Розміщуючи спай з металів з різними термоерс в середовище з температурою Т1
, а інші кінці провідників при температурі Т2
, то на кінцях провідників отримається напруга, пропорційна до різниці температур Т1
і Т2
.
Перший термоелемент був створений в 1887 році французьким науковцем Ле Шателье (le Chatelier). В термоелементі дві точки контакту А і В з’єднані двома паралельними провідниками, виконаними з різних металів (наприклад, алюміній і мідь). Таким чином утворюється замкнутий ланцюг (рис.2.1).
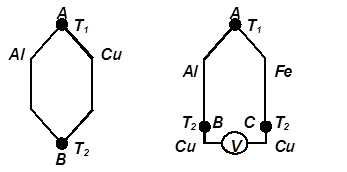
Рис.2.1.Принцип роботи термоелемента
Якщо температури в точках А і В відрізняються, то по ланцюгу починає протікати електричний струм. Якщо між спаями є різниця температур, то на виході термопари буде напруга U. Залежності U(T) для різних матеріалів відомі, що дозволяє визначати T через U. Якщо один спай занурити, наприклад, в лід що тане (0°С), а інший ввести в контакт з об’єктом вимірювання, то між ними з’являється термо-ЕРС, яку можна виміряти, і яка складає, в залежності від виду термопари 7…75 мкВ/°С.
Реклама

У випадку термопари з міді і мідно-нікелевого сплаву термо-ЕРС в діапазоні температур 0…100°С складає приблизно 40 мкВ/°С. При різниці температур спаїв в 100°С отримуємо приблизно 4.3 мВ. Для достатньо точного виміру такої незначної напруги необхідні дорогі та складні вимірювальні підсилювачі. Крім того опорна температура завжди має підтримуватися на одному рівні або також вимірюватися.
Термопари є невеликими, точними і відносно недорогими пристроями, які працюють у широкому діапазоні температур. Вони особливо корисні при виконанні вимірювання досить високих температур (до +2300 ˚С) в агресивних середовищах. Вони дають на виході мілівольтні сигнали і потребують точного підсилення для проведення подальшої їх обробки. Вони також потребують мір по компенсації температури холодного спаю. Вони більш лінійні, ніж багато інших сенсорів й їх нелінійність добре формалізована. Для створення термопар використовують наступні метали і сплави: залізо, платина, родій, реній, вольфрам, мідь, алюмень (сплав нікеля і алюмінія), хромель (сплав нікеля і хрому), константан (сплав міді і нікелю), копель (сплав нікелю, заліза і міді) та ін.
Часто одночасно використовується два спаї (диференційна термопара), один з яких знаходиться при відомій (опорній) температурі, а другий вимірює температуру об’єкту і називається чутливим або вимірювальним.
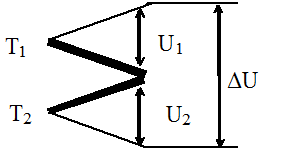
Рис. 2.2. Диференційна термопара
На рис. 2.3 показані криві залежності напруги від температури для трьох поширених термопар при фіксованій температурі опорного спаю (холодного спаю) 0˚С. З показаних сенсорів термопари J є найбільш чутливими, для яких заданому перепаду температури відповідає найбільша вихідна напруга. З іншої сторони, термопари S є найменш чутливими. Наведені характеристики корисні при розробці схем нормування сигналів, оскільки для термопари з малими вихідними сигналами потрібні підсилювачі з більш низькими шумами, малим дрейфом і високим підсиленням.
Для розуміння поведінки термопари потрібно розглянути нелінійність її відгуку на перепад температури. На рис. 2.3 показано відношення між температурою вимірювального спаю і вихідною напругою для ряду термопар (в усіх випадках холодний спай підтримується при температурі 0˚С).
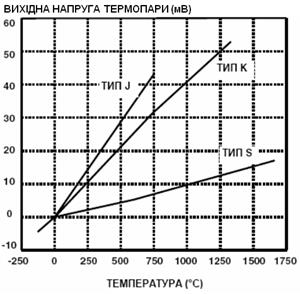
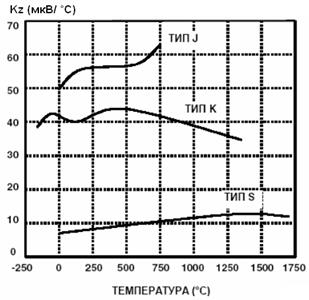
Рис. 2.3. Характеристики термопар: а) залежність вихідної напруги від температури; б) перша похідна залежності напруги від температури.
Згідно із завданням в якості сенсора використовується термопара „Мідь-константан” типуТ. Температурний діапазон термопари від 0 до 400 ºС [1, С.46]. Апроксимуючий поліном:
 ,(2.1) ,(2.1)
деE –термоелектрорушійна сила (терс), мкВ;
| i |
1 |
2 |
3 |
4 |
5 |
| bi
|
3,87408·101
|
3,31902·10-2
|
2,07142·10-4
|
-2,19458·10-6
|
1,10319·10-8
|
| i |
6 |
7 |
8 |
| bi
|
-3,09275·10-11
|
4,56533·10-
14
|
-2,76169·10-
17
|
Таблиця 2.1. Номінальна статична характеристика перетворення термопари „Мідь-константан”
| T, ºС |
0 |
100 |
200 |
300 |
400 |
| E, мВ |
0,000 |
4,277 |
9,286 |
14,860 |
20,869 |
2.1.2 Будова і принцип роботи підсилювача
Згідно завдання схема під’єднання операційного підсилювача А1
[2]:
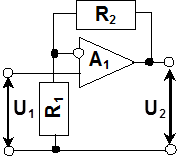
Рис.2.4. Схема підсилювача
Коефіцієнт підсилення схеми по напрузі:
 . (2.2) . (2.2)
Згідно завдання R1
=12 кОм, R2
= 120 кОм.
2.1.3 Аналогово-цифровий перетворювач
Для комп’ютерної обробки дискретні аналогові значення вимірювального сигналу, необхідно представити в цифровій формі, тобто виконати аналого-цифрове (AC, Analog-Digital – A/D) перетворення. Відповідний пристрій являється аналого-цифровим перетворювачем (АЦП, Analog-Digital Converter, ADC Converter – ADC). АЦП генерує двійкове слово – цифровий вихід – на основі аналогового сигналу. АЦП може працювати у відповідності з різними принципами: паралельне порівняння, покрокове наближення (апроксимація)[2-4].
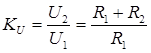
Метод послідовної лічби із застосуванням АЦП заснований на урівноваженні вхідної напруги сумою еталонів, які підраховуються лічильником. Момент урівноваження визначається аналоговим компаратором. Схема АЦП послідовної лічби показана на рис. 2.5. а. У ній за сигналом "Пуск" RS-тригер переключається в стан "1" і дозволяє проходження імпульсів від генератора G через елемент І на вхід підсумовування двійкового лічильника СТ2.
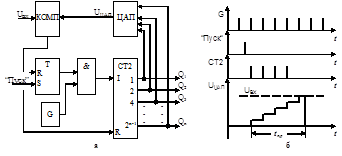
Рис. 2.5. Аналого-цифровий перетворювач послідовної лічби з ЦАП: а – схема; б – часові діаграми роботи
Наростаючий цифровий код з виходу лічильників СТ2 перетворюється за допомогою ЦАП в напругу, яка подається на вхід компаратора КОМП. На другий вхід КОМП поступає вимірювана напруга Uвх. У момент рівності напруг UВХ
=UЦАП
компаратор виробляє сигнал скидання тригера. Після цього рахунок імпульсів припиняється і на виході лічильника СТ2 фіксується цифровий еквівалент вхідної напруги. Час перетворення tпр
залежить від значення напруги UВХ
(рис. 2.5, б).
Згідно завданню схема АЦП:

Рис. 2.6. Схема АЦП
Роздільна здатність n-бітного АЦП
h = U0
/ (2n
-1), (2.3)
де U0
– опорна напруга.
Цифрове значення на виході АЦП:
D =Round(U2
/h). (2.4)
Згідно завданню розрядність АЦП n=8, опорна напруга U0
=1 В.
2.1.4 Мультиплексор
В багатьох випадках різні елементи системи повинні разом використовувати деякі обмежені ресурси, наприклад вхідний порт комп’ютера або довгий сигнальний кабель, по котрому передається інформація від декількох датчиків. Мультиплексування (multiplexing) [2] дає можливість комп’ютеру у будь-який момент часу вибрати сигнал, який датчику необхідно зчитати. Іншими словами мультиплексор (multiplexer) можна розглядати як перемикач (комутатор), який з’єднує комп’ютер у кожен момент часу тільки з одним датчиком (рис.2.7). Мультиплексування застосовується не тільки в області вимірювання, але й відіграє, хоча і в іншому сенсі, важливу роль в техніці зв’язку.
Рис. 2.7. Мультиплексування і АЦ – перетворення вимірювальної інформації
Мультиплексор може бути електромеханічним або електронним. Якщо вважати, що всі виходи мультиплексора пронумеровані, то перемикання зазвичай відбувається послідовно у відповідності з порядковим номером; однак застосовуються і інші алгоритми. Електромеханічний мультиплексор з язичковим реле – надійна, хоча до деякої міри, повільна система; він може виконувати до сотні комутацій в секунду. Експлуатаційний період мультиплексора цього типу обмежений природнім зношування рухомих частин, хоча, з іншого боку, такі системи мають добрі ізолюючі якості й низьку вартість. Інший не менш важливий фактор – дуже мале зниження напруги на контактах. Для порівняння: електронний напівпровідниковий мультиплексом значно швидший (комутація триває не більше кількох мікросекунд).
Згідно завданню схема мультиплексора наступна:
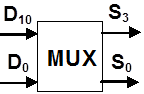
Рис. 2.8. Сигнали мультиплексора
2.1.5 Паралельний порт
Основне призначення паралельного порту (інтерфейс Centronics, аналог ИРПР-М) – це під’єднання до комп’ютера принтерів різних типів[5, 6]. Тому розміщення контактів роз’єму, призначення сигналів та програмні засоби орієнтовані на це застосування. В той же час через Centronics можна керувати й нестандартними зовнішніми пристроями. Перевагами Centronics є стандартність, простота та паралельність (рис. 2.9).
Для зв’язку комп’ютера із зовнішніми пристроями служать порти. Одні порти служать для вводу даних в комп’ютер, а інші - для виводу. Дані в порт записуються і зчитуються по шині даних D0-D7 (8 біт), а для вибору конкретного порту використовується шина адреси A0-A15 (16 біт).
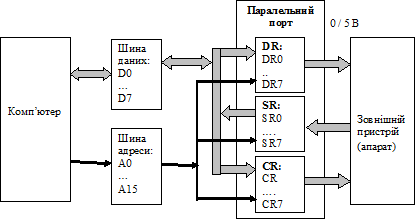
Рис. 2.9. Ввід-вивід даних через паралельний порт
Фактично паралельний порт складається з трьох 8-бітних портів/ регіcтрів:
1) DR – Data Register, 8 – бітний регістр даних (вивід);
2) SR - Status Register, 5-бітний регістр стану (ввід);
3) CR – Control Register , 4-бітний регістр контролю (вивід);
при цьому DR, CR служать для виводу даних з комп’ютера, а SR – для вводу. Кожному біту (розряду) порту принтера фізично відповідає один контакт в роз’ємі. Використовується такі адреси портів принтера: LPT1 ($00378), LPT2 ($00278) і LPT3($003BC). Для більшості комп’ютерів адреси портів принтера (LPT1) в шістнадцятковій системі наступні: DR ($00378); SR ($00379), CR ($0037А), тобто адреса наступного регістра на 1 більша від попереднього, проте адреса першого порта може бути різною. Визначити адресу – в BIOS.
Логічній одиниці на розряді паралельного порту відповідає напруга +5В, а логічному нулю – 0 В. Проте, якщо розряд інверсний, то логічній одиниці відповідає 0 В, а логічному нулю – 5В.
Інформація в порт зчитується по 4 біти:

Рис. 2.10. Зчитування бітів у порт
2.2 Опис алгоритму і функціонування програми
Алгоритм програми полягає в зчитуванні початкового сигналу (температури), перетворенні температури в аналогову напругу за допомогою термопари, напруги – у цифровий сигнал за допомогою АЦП, зчитуванні цифрового сигналу в порт через мультиплексор.
2.3 Опис організації вхідних та вихідних даних
В якості вхідних даних використано значення температури, а також параметри термопари, підсилювача, АЦП, мультиплексора. Вихідні дані – значення сигналу на різних етапах обробки, графік вихідного цифрового сигналу.
2.4 Опис організації вибору технічних і програмних засобів
Розроблений програмний продукт орієнтований на роботу в ОС Windows 95/98/NT/XP, тому для коректної роботи програми необхідне стабільне функціонування ОС. Під час виконання, програма не звертається до інших програмних продуктів, таких як Microsoft Office та ін.
Для усунення виявлених помилок та створення завантажувального файлу необхідний встановлений пакет інструментальних засобів Borland Delphi.
До технічних засобів відносимо ПК. Мінімальними вимогами, за яких програма працюватиме та буде видавати достовірні результати, до апаратної частини ПК, можна вважати:
• процесор 6-го покоління Intel Celeron 533 МГц;
• об’єм оперативної пам’яті 256 Мб.;
• жорсткий диск ємністю 20 Гб.
3. ОЧІКУВАНІ ТЕХНІКО – ЕКОНОМІЧНІ ПОКАЗНИКИ
Використовуючи розроблений програмний продукт, студент має можливість візуально вивчати роботу вимірювальної системи. Організація підготовки до виконання лабораторної роботи, використовуючи розроблений програмний продукт, економить викладачу час на пояснення теоретичного матеріалу, що надає можливість використати його в інших цілях.
До переваг такої програми можна віднести її вузьку спеціалізацію з наявним програмним кодом, на відміну від її можливих аналогів. Використовуючи програмний код, можна розширювати функціональні можливості програми, в залежності від потреб. Таким чином, можна покращити його техніко – економічні показники та ефективність використання в навчальному процесі.
Список використаних джерел
1. Рогельберг И.Л., Бейлин В.М. Сплавы для термопар. Справоч. изд. – М.: Металлургия, 1983. – 360 с.
2. Бабич М.П. Жуков І.А. Комп’ютерна схемотехніка: Навчальний посібник. – К.: МК-Пресс, 2004. – 412 с.
3. Ан П. Сопряжение ПК с внешними устройствами: Пер. с англ.– М.: ДМК Пресс, 2001.– 320 с.
4. Гелль П. Как превратить компьютер в измерительный комплекс. – М.: ДМК, 1999. – 144 с.
5. Гук М. Интерфейсы ПК: справочник. – СПб.: Питер, 1999. – 416 с.
6. Новиков Ю.В., Калашников О.А., Гуляев С.Э. Разработка устройств сопряжения для персонального компьютера типа IBM PC. – М.: ЭКОМ, 1997. – 224 с.
|
