Федеральное агентство по образованию
Государственное образовательное учреждение
высшего профессионального образования
Тульский государственный университет
Кафедра теоретической механики
Курсовая работа
по курсу «Динамика» на тему
«Динамика плоских шарнирных механизмов»
Кафедра теоретической механики
Рецензия на курсовую работу
студента__________________________________
группы №_________________________________
вариант №_________________________________
количество страниц_________________________
курсовая работа по содержанию
соответствует / не соответствует
выданному заданию и выполнена
в полном / не в полном
обьёме. КР может быть допущена к защите с
добавлением____________баллов рецензента
после успешной защиты.
Рецензент_______/_______________________
«_______»_________________________2007 г.
Тула, 2007 г.
Аннотация
В данной работе изучается динамическое поведение многозвенного плоского шарнирного механизма. Совместно решается нелинейная система, в которую входят: нелинейное дифференциальное уравнение движения механизма, система нелинейных уравнений геометрических связей и система линейных алгебраических уравнений кинематических связей. Исследуются факторы, влияющие на неравномерность вращения ведущего звена. Все вычисления и построения графиков осуществляется в математическом пакете Mathcad
Содержание
Введение
1. Исходные данные и схема механизма
2. Составление дифференциального движения механизма
2.1 Составление кинематических соотношений
2.2 Составление дифференциального уравнения движения механизма с помощью теоремы об изменении кинетической энергии системы
3. Нахождение реакций внешних и внутренних связей
4. Результаты расчётов
4.1 Алгоритм вычислений
4.2 Динамический расчёт плоского шарнирного механизма
5. Анализ результатов вычислений
6. Результаты анализа
7. Выводы
8. Список использованной литературы
Введение
Плоские шарнирные механизмы широко распространены в современном машиностроении в связи с присущими им достоинствами: высокой технологичностью изготовления, возможностью выполнения шарнирных соединений на подшипниках качения, небольшим износом соприкасающихся поверхностей, долговечностью, надежностью в работе и ремонтоспособностью.
Реклама

Без глубокого знания кинематических и динамических характеристик механизмов, входящих в современный агрегат, невозможно спроектировать машину с параметрами, близкими к оптимальным, что, безусловно, отражается на производительности, надежности, долговечности машины, и на качестве выпускаемой продукции. Знание кинематических и динамических свойств и возможностей механизмов необходимо для разработки новых технологических процессов.
Целью курсовой работы является исследование и анализ динамического поведения плоского шарнирного механизма с помощью основных теорем и принципов теоретической механики.
1.
Исходные данные и схема механизма
Плоский шарнирный механизм (рис. 1), расположенный в вертикальной плоскости, движется под действием внешнего момента , приложенного к ведущему звену (кривошипу ОА) и изменяющемуся по закону , приложенного к ведущему звену (кривошипу ОА) и изменяющемуся по закону . На звено О1
D действует полезная нагрузка MH
, величина которой задается соотношением . На звено О1
D действует полезная нагрузка MH
, величина которой задается соотношением

Звенья механизма моделируются сплошными однородными стержнями, массы которых пропорциональны их длине. Погонная плотность каждого стержня равна ρ. Соединение стержней осуществлено идеальными шарнирами. Движение механизма начинается из состояния покоя, а начальное значение угла поворота ведущего звена равно φ = 0.
Требуется
- Составить дифференциальное уравнение движения механизма с помощью
теоремы об изменении кинетической энергии.
- Определить динамические реакции внешних и внутренних связей.
- Провести численное интегрирование дифференциального уравнения движения при заданных начальных условиях с помощью пакета Mathcad.
- Провести анализ результатов вычислений.
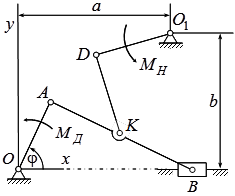
Рис. 1 Схема механизма
Дано:
2. Составление дифференциального уравнения движения механизма
Для решения поставленной задачи выберем правую систему координат, начало которой расположим в подшипнике О. Рассмотрим механизм в произвольном положении и изобразим силы, действующие на него в данный момент времени (рис.2):  - силы тяжести звеньев; MH
- полезная нагрузка; МД
- возмущающий момент; - силы тяжести звеньев; MH
- полезная нагрузка; МД
- возмущающий момент;  - реакции опор. - реакции опор.
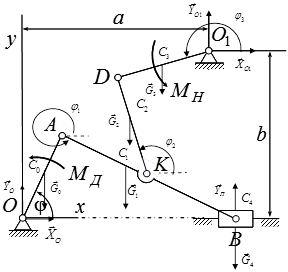
Рис.2 Расчётная схема механизма.
2.1 Составление кинематических соотношений
Рассматриваемый механизм представляет собой механическую систему с одной степенью свободы. Положение всех его звеньев будем определять с помощью угла поворота ведущего звена φ. Углы поворотов звеньев φk
(k=1,2,3), отсчитываются от горизонтальной оси Ох в положительном направлении.
Выразим кинематические характеристики всех тел механизма через кинематические параметры ведущего звена с помощью уравнений геометрических связей (подробное описание этой процедуры можно получить в КР по кинематике 21 вариант за 2006 г.)
Реклама

 (1) (1)
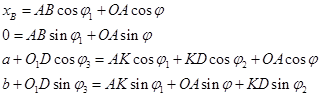
Угловые координаты звеньев механизма и координата ползуна B будут определяться соотношениями
 (2) (2)

где - 


Угловые скорости звеньев можно получить из соотношения
 (3) (3)
где  вектор угловых скоростей звеньев, отнесённых к угловой скорости ведущего звена вектор угловых скоростей звеньев, отнесённых к угловой скорости ведущего звена 
 - матрица коэффициентов системы уравнений - матрица коэффициентов системы уравнений

 - вектор правых частей системы уравнений - вектор правых частей системы уравнений
Скорости центров масс кривошипов ОА и О1
D найдём по формуле Эйлера
  (4) (4)
а скорости центров масс шатунов АB и KD вычислим с помощью теоремы о сложении скоростей плоской фигуры.
  (5) (5)
где  - скорость точки А кривошипа ОА, - скорость точки А кривошипа ОА,  - скорость точки K шатуна AB. - скорость точки K шатуна AB.
Скорость ползуна B определим дифференцированием четвёртого уравнения системы (2)
 (6) (6)
Угловые ускорения механизма связаны между собой аналогичными с (3) выражениями
 (7) (7)
 - вектор неизвестных угловых ускорений звеньев. - вектор неизвестных угловых ускорений звеньев.
 - вектор правых частей системы уравнений - вектор правых частей системы уравнений 
 (8) (8)
При вычислении угловых ускорений учтено, что ускорение ведущего звена не равно нулю.
Ускорения центров масс кривошипов ОА и О1
D найдём по формуле Эйлера
  (9) (9)
а ускорения центров масс шатунов АB и KD вычислим с помощью теоремы о сложении ускорений плоской фигуры.
  (10) (10)
где  - ускорение точки А кривошипа ОА, - ускорение точки А кривошипа ОА,  - ускорение точки K шатуна АB. - ускорение точки K шатуна АB.
Ускорение ползуна B определим дифференцированием уравнения (6)
 (11) (11)
2.2 Составление дифференциального уравнения движения механизма с помощью теоремы об изменении кинетической энергии
Для составления дифференциального уравнения движения механической системы с одной степенью свободы применим теорему об изменении кинетической энергии в дифференциальной форме
 (12) (12)
где Т - кинетическая энергия системы;  - сумма мощностей внешних сил; - - сумма мощностей внешних сил; -  сумма мощностей внутренних сил. сумма мощностей внутренних сил.
Вычислим кинетическую энергию системы как сумму кинетических энергий тел, образующих механическую систему
Т = Т0
+Т1+
Т2
+Т3
+Т4
,
где  - кинетическая энергия кривошипа ОА, совершающего вращательное движение вокруг оси Oz; - кинетическая энергия кривошипа ОА, совершающего вращательное движение вокруг оси Oz;
 - кинетическая энергия шатуна АB, совершающего плоское движение; - кинетическая энергия шатуна АB, совершающего плоское движение;
 - кинетическая энергия шатуна KD, совершающего плоское движение; - кинетическая энергия шатуна KD, совершающего плоское движение;
 - кинетическая энергия кривошипа О1
D, совершающего вращательное движение вокруг оси O1
z; - кинетическая энергия кривошипа О1
D, совершающего вращательное движение вокруг оси O1
z;
 - кинетическая энергия ползуна B, который движется поступательно. - кинетическая энергия ползуна B, который движется поступательно.
Моменты инерции сплошных однородных стержней, составляющих механизм, относительно осей проходящих через их центры масс равны
   
Подставляя всё в выражение кинетической энергии системы, окончательно получаем:
 (13) (13)
где  (14) (14)
- приведенный момент инерции механизма, а величины , (k = 1,4) - скорости точек механизма, отнесенные к угловой скорости ведущего звена , (k = 1,4) - скорости точек механизма, отнесенные к угловой скорости ведущего звена 
Для рассматриваемой механической системы, состоящей из абсолютно твердых тел, соединенных идеальными шарнирами сумма мощностей внутренних сил равна нулю.
Сумма мощностей внешних сил будет равна

где , ,  , ,  , , мощности сил тяжести звеньев; мощности сил тяжести звеньев;  - мощность момента приводящего механизм в движение; - мощность момента приводящего механизм в движение; - мощность полезной нагрузки. - мощность полезной нагрузки.
Мощности сил, равны нулю, т.к. реакция опорной плоскости YП
и сила тяжести перпендикулярна скорости точки B, а остальные силы приложены к неподвижным точкам. равны нулю, т.к. реакция опорной плоскости YП
и сила тяжести перпендикулярна скорости точки B, а остальные силы приложены к неподвижным точкам.
Учитывая выражения для движущего момента МД
и полезной нагрузки , окончательно получим , окончательно получим
 (15) (15)
где (16) (16)
- приведенный момент внешних сил, а величины  и и  равны равны
Подставляя найденные выражение кинетической энергии (13) и мощности внешних сил (15) в теорему об изменении кинетической энергии (12), получим дифференциальное уравнение движения механизма
 (17) (17)
где  - производная момента инерции механизма по углу поворота ведущего звена. - производная момента инерции механизма по углу поворота ведущего звена.
Решив данное дифференциальное уравнение второго порядка с указанными в задаче начальными условиями, найдем закон движения ведущего звена , его угловую скорость , его угловую скорость  и угловое ускорение и угловое ускорение . .
3. Нахождение реакций внешних и внутренних связей
Для определения реакций внешних и внутренних связей расчленим плоский шарнирный механизм на отдельные звенья и изобразим реакции внешних и внутренних связей каждого звена (рис. 3).
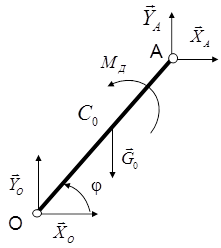 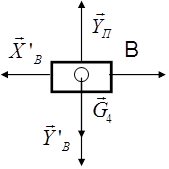 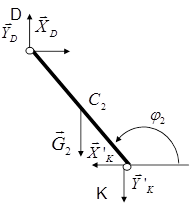 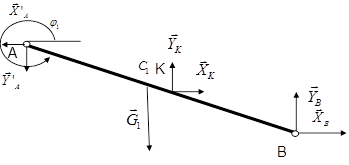 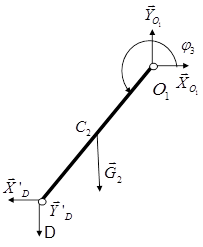
Рис.3 Расчётные схемы звеньев плоского механизма.
Применив к каждому телу, изображенному на расчетной схеме, теорему о движении центра масс (в проекциях на оси координат) и теорему об изменении кинетического момента (для кривошипов относительно осей вращения, для шатунов относительно осей проходящих через центр масс) получим следующую систему уравнений:
Кривошип ОА:
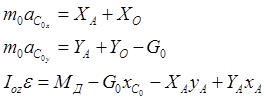 (18) (18)
Шатун АB:
 (19) (19)
Шатун KD:
 (20) (20)
Кривошип О1
D:
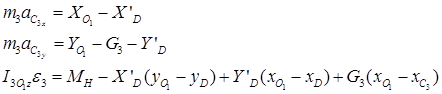 (21) (21)
Ползун B:
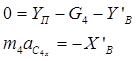 (22) (22)
Первое уравнение системы (22) позволяет определить реакцию опорной плоскости YП
, а третье из системы (18), после подстановки найденных величин, дифференциальное уравнение движения механизма (17).
Оставшиеся двенадцать соотношений представляют собой систему линейных алгебраических уравнений относительно неизвестных реакций.
4. Результаты расчетов
Решение поставленной задачи сводится к численному интегрированию дифференциального уравнения движения механизма (17) и решению системы двенадцати линейных алгебраических уравнений (18) - (21) относительно неизвестных динамических реакций внешних и внутренних связей.
Задача интегрирования дифференциального уравнения (17) связана с большим количеством предварительных вычислений и может быть условно разбита на пять блоков:
о решение системы уравнений геометрических связей (1) или вычисление геометрических соотношений (2);
о вычисление кинематических соотношений по формулам (3) - (11);
о вычисление приведенного момента инерции механизма и приведенного момента внешних сил.
о вычисление производной от приведенного момента инерции по углу поворота ведущего звена.
о численное интегрирование дифференциального уравнения.
Все это может быть проведено в Mathcad несколькими способами использующими различные встроенные процедуры-функции. Отличие этих способов и методов заключается во времени вычислений, которое требуется для нахождения: решения системы уравнений геометрических связей, приведенного момента инерции механизма и его производной, приведенного момента внешних сил, а также решения дифференциального уравнения движения (17). Ниже рассмотрен алгоритм и приведен документ Mathcad, в котором обеспечивается минимальное время вычислений.
4.1 Алгоритм вычислений
Угловые координаты звеньев  и положение ползуна B и положение ползуна B вычисляются в явном виде по формулам (2). вычисляются в явном виде по формулам (2).
Угловые скорости звеньев  , отнесенных к угловой скорости кривошипа, вычисляются в явном виде по формулам (3). , отнесенных к угловой скорости кривошипа, вычисляются в явном виде по формулам (3).
Скорости центров масс звеньев  отнесенных к угловой скорости кривошипа, вычисляются в явном виде по формулам (4) - (6), которые примут следующий вид отнесенных к угловой скорости кривошипа, вычисляются в явном виде по формулам (4) - (6), которые примут следующий вид


 (23) (23)

Далее, по формулам (14) и (16) вычисляется приведенный момент инерции  и коэффициенты в приведенном моменте внешних сил и коэффициенты в приведенном моменте внешних сил  . .
Для вычисления производной  от приведенного момента инерции по углу поворота ведущего звена воспользуемся явным представлением этой производной от приведенного момента инерции по углу поворота ведущего звена воспользуемся явным представлением этой производной
 Производные Производные  можно найти, продифференцировав по φ систему уравнений можно найти, продифференцировав по φ систему уравнений  . Получим . Получим
 
Откуда  , ,
где вектор  , а матрица , а матрица  определена соотношением (8). определена соотношением (8).
Производные  находятся дифференцированием по углу поворота кривошипа ОА выражений (23) находятся дифференцированием по углу поворота кривошипа ОА выражений (23)
Для численного интегрирования дифференциального уравнения второго порядка (17) представим его в виде системы двух дифференциальных уравнений первого порядка. Введя новые переменные  и и  , получим , получим

 (24) (24)
Эти соотношения позволяет вычислять угловое ускорение кривошипа, если известны его угол поворота и угловая скорость; в частности, можно вычислить угловое ускорение в начальный момент по заданным начальным значениям угла поворота и угловой скорости кривошипа.
Для интегрирования системы уравнений (24) при заданных начальных условиях используем встроенную в пакет Mathcad процедуру-функцию Radau..
Матрица, получаемая в результате решения, содержит три столбца; первый - для значений времени t, второй - для значений угла поворота , третий - для значений угловой скорости 
Решение системы линейных алгебраических уравнений (18) - (21), для нахождения динамических реакций внешних и внутренних связей реализуем матричным способом
Ниже приведен документ Mathcad, в котором реализована процедура интегрирования дифференциального уравнения движения механизма и вычисления реакций внешних и внутренних связей.
4.2 Динамический расчет плоского шарнирного механизма
Ввод исходных данных и вычисление постоянных величин















Определение угловых координат звеньев и горизонтальной координаты ползуна B как функции угла поворота ведущего звена



Определение положения узловых точек механизма радиус-векторами






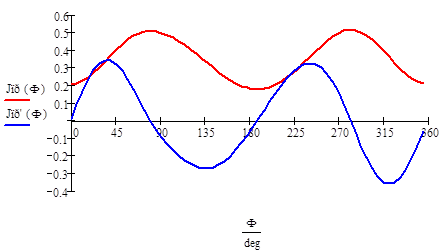
Блок вычисления приведённого момента инерции


| Определение законов изменения скоростей звеньев отнесённых к угловой скорости кривошипа в векторной форме |

| Определение скоростей узловых точек механизма отнесенных к угловой скорости кривошипа |










Вычисление приведённого момента инерции механизма
Блок вычисления производной от приведённого момента инерции
Вычисление моментов инерции кривошипов относительно оси вращения, шатунов - относительно осей, проходящих через центр масс












Вычисление производных от скоростей отнесённых к угловой скорости кривошипа
Вычисление производных Ω'k (k=1,2,3)
Формирование производных Ω'k (k=1,2,3) в виде векторов
Блок вычисления приведённого момента внешних сил и углового ускорения звена
Вычисление производной Jпр'
Формирование векторов сил тяжести звеньев механизма





Вычисление коэффициентов в выражении приведённого момента внешних сил
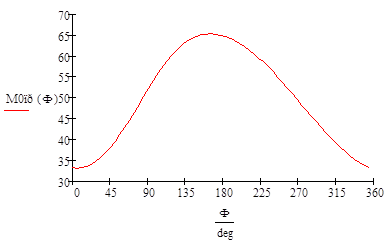
Отобразим изменение вычисляемых величин на графике за один оборот кривошипа
Вычисление углового ускорения кривошипа ОА

Конечный момент времени
Процедура интегрирования дифференциальных уравнений
Конечный момент времени
Количество узловых точек


Формирование системы дифференциальных уравнений
Вывод результатов вычислений


Применение процедуры Radau

Формирование векторов искомых величин
Вычисление средней угловой скорости



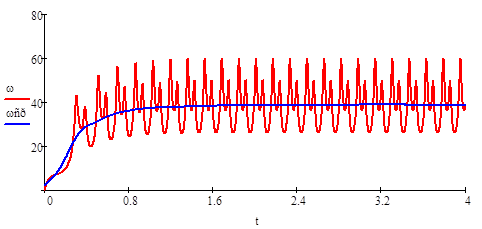
График изменения угловой скорости ω=ω(t) и величины ωср




Вычисление среднего углового ускорения εср

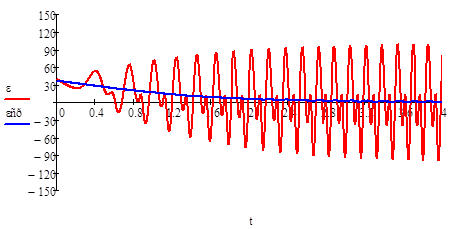
График углового ускорения ε и εср
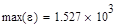
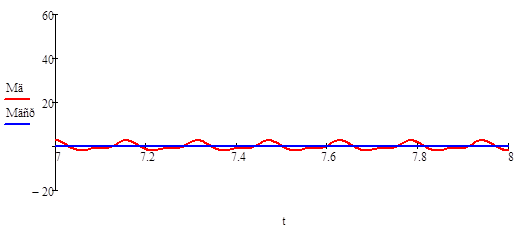
Вычисление MД и его среднего значения


График Мд и Мдср
Процедура вычисления реакций внешних и внутренних связей
Вычисление угловых ускорений звеньев механизма
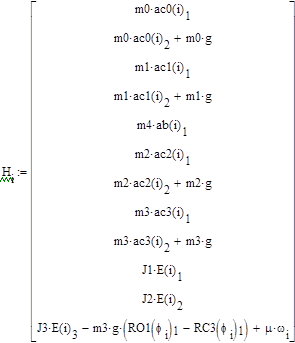
Формирование вектора правых частей системы уравнений
Нахождение угловых ускорений звеньев









Вычисление ускорения узловых точек и центров масс звеньев





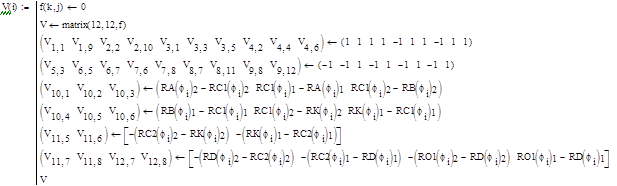
Формирование матрицы коэффициентов V при неизвестных реакциях и вектора правых частей H для каждого момента времени задаваемого вектором решений t




















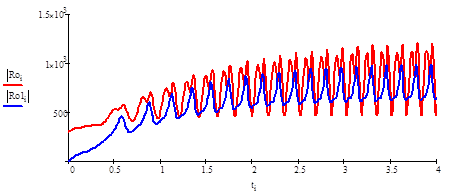
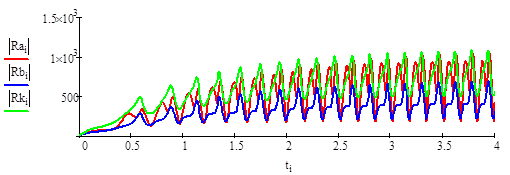
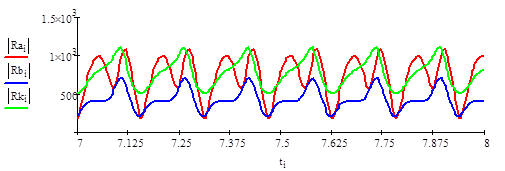
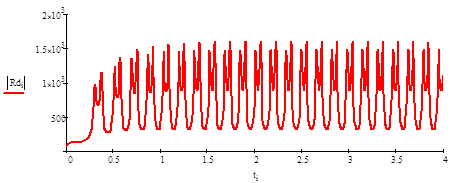
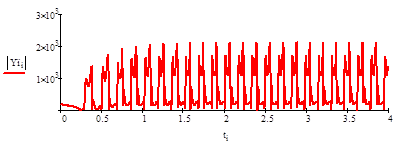
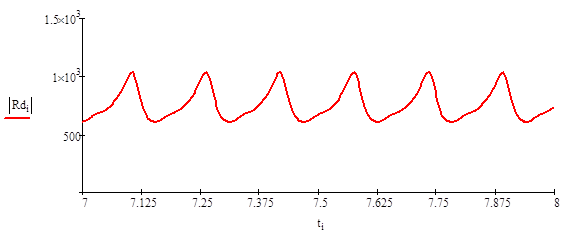
Графики реакций внешних и внутренних связей
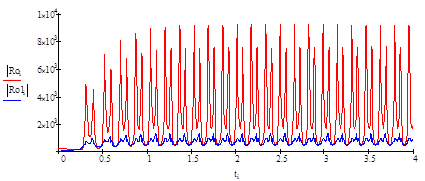
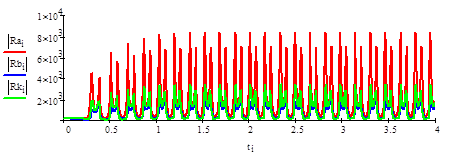
5. Анализ результатов вычислений
Анализ результатов вычислений позволяет сделать следующие выводы
1. Время неустановившегося движения механизма невелико и составляет
около 1.3 с.
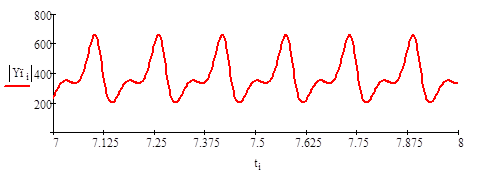
2. В установившемся режиме движение кривошипа близко к равномерному вращению, средняя угловая скорость которого порядка 
Максимальные и минимальные значения угловой скорости в установившемся режиме приблизительно равны  и и  , а его период - 0.162 с. Таким образом, коэффициент неравномерности движения механизма приблизительно равен , а его период - 0.162 с. Таким образом, коэффициент неравномерности движения механизма приблизительно равен
3. В установившемся режиме среднее угловое ускорение маховика приблизительно равно  . Амплитуда изменения углового ускорения значительна и составляет около . Амплитуда изменения углового ускорения значительна и составляет около  , а коэффициент динамичности в этом случае , а коэффициент динамичности в этом случае
4. При заданных геометрических и инерционных параметрах механизма градиенты углового ускорения ведущего звена, а также реакций внешних и внутренних связей в сочленениях звеньев механизма имеют большие значения. Это может привести к разрывам механизма в местах сочленений и нарушению его работоспособности.
На основании выводов по результатам расчета движения механизма сформулируем задачу исследования.
Выявить факторы, влияющие на неравномерность движения механизма и найти такие решения, при которых неравномерность установившегося движения исчезает или становится незначительной.
Анализ дифференциального уравнения движения механизма (17) показывает, что основными факторами, влияющими на неравномерность движения, являются:
- величина приведенного момента инерции  (чем больше, тем меньше амплитуда угловых ускорений); (чем больше, тем меньше амплитуда угловых ускорений);
- характер изменения производной  (чем меньше амплитуда и чем больше период ее изменения, тем меньше градиенты углового ускорения); (чем меньше амплитуда и чем больше период ее изменения, тем меньше градиенты углового ускорения);
Таким образом, для уменьшения неравномерности движения необходимо
обеспечить:

- где  , , - центр масс всего механизма - центр масс всего механизма
что может быть получено за счет увеличения приведенного момента инерции механизма и уменьшения амплитуды его изменения.
Это достигается постановкой на ведущее звено массивного маховика и (или) облегчением остальных звеньев механизма.
6. Результаты анализа
С целью подтверждения проведенных исследований произведем расчет конструктивно измененного механизма. Заменим ведущий кривошип (однородный стержень) массивным маховиком с массой распределённой по ободу и уменьшим массы остальных частей механизма, выбрав материал с меньшей погонной плотностью.
Ввод исходных данных и вычисление постоянных величин



| Определение положения узловых точек механизма радиус-векторами |
Вычисление моментов инерции кривошипов относительно оси вращения, шатунов - относительно осей, проходящих через центр масс

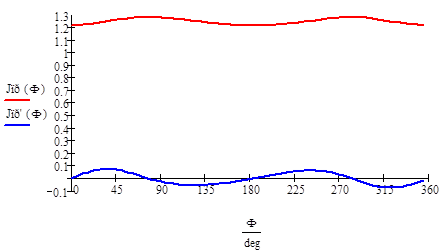
Отображение приведённого момента инерции и его производной на графике за один оборот кривошипа

Процедура интегрирования дифференциальных уравнений
Конечный момент времени

Вывод результатов вычислений
Вычисление средней угловой скорости
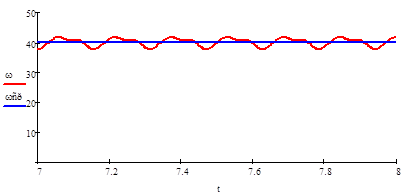
График изменения угловой скорости ω=ω(t) и величины ωср в интервале


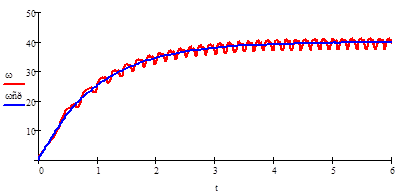
График изменения угловой скорости ω=ω(t) и величины ωср в интервале 
Вычисление среднего углового ускорения εср
График углового ускорения ε и εср




Вычисление MД и его среднего значения
График Мд и Мдср
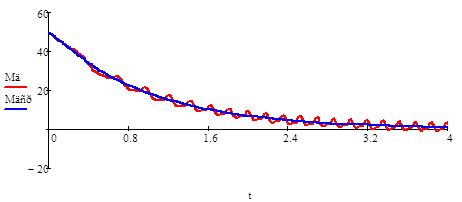
График Мд и Мдср
Графики реакций внешних и внутренних связей
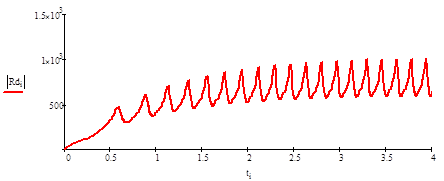
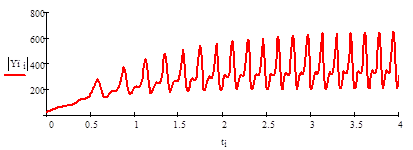
Графики реакций внешних и внутренних связей
В результате:
- Время неустановившегося движения механизма составляет около 5.5 с;
- В установившемся режиме движения средняя угловая скорость маховика составляет  . Максимальные и минимальные значения угловой скорости в установившемся режиме равны . Максимальные и минимальные значения угловой скорости в установившемся режиме равны  и и 
- Коэффициент неравномерности движения механизма становится равным
- Коэффициент динамичности в этом случае
Такое уменьшение, по сравнению с первоначальным случаем, коэффициентов неравномерности ( в 9.5 раз) и динамичности ( в 16.2 раза) приводит к уменьшению максимальных значений модулей реакций внешних и внутренних связей приблизительно до 7.5 раз. в 9.5 раз) и динамичности ( в 16.2 раза) приводит к уменьшению максимальных значений модулей реакций внешних и внутренних связей приблизительно до 7.5 раз.
7. Выводы
В результате решения полученного дифференциального уравнения движения механизма были определены: закон движения ведущего звена ОА, его угловые скорость и ускорение как функции времени t. На основании найденного закона движения по разработанному алгоритму были вычислены значения реакций внешних и внутренних связей.
Проведенный анализ результатов расчета показал, что
1. Время неустановившегося движения механизма невелико и составляет около 1.3 с.
2. В установившемся режиме движение кривошипа близко к равномерному вращению, средняя угловая скорость которого порядка 
Максимальные и минимальные значения угловой скорости в установившемся режиме приблизительно равны  и и  , а его период - 0.162 с. Таким образом, коэффициент неравномерности движения механизма приблизительно равен , а его период - 0.162 с. Таким образом, коэффициент неравномерности движения механизма приблизительно равен
3. В установившемся режиме среднее угловое ускорение маховика приблизительно равно  . Амплитуда изменения углового ускорения значительна и составляет около . Амплитуда изменения углового ускорения значительна и составляет около  , а коэффициент динамичности в этом случае , а коэффициент динамичности в этом случае
4. При заданных геометрических и инерционных параметрах механизма градиенты углового ускорения ведущего звена, а также реакций внешних и внутренних связей в сочленениях звеньев механизма имеют большие значения. Это может привести к разрывам механизма в местах сочленений и нарушению его работоспособности.
С целью устранения этой ситуации был сформулирован критерий, удовлетворение которого позволит уменьшить значение этих коэффициентов.
Проведенные исследования показали, что уменьшения масс звеньев механизма, с одновременным увеличением массы ведущего звена и замены кривошипа маховиком с массой распределенной по его ободу значительно снизили величины данных коэффициентов.
Таким образом, увеличение массы ведущего звена в 15 раз с одновременным уменьшением масс звеньев в 10 раз и уменьшением массы ползуна в 2 раза позволило добиться следующего:
- Время неустановившегося движения механизма составляет около 5.5 с;
- В установившемся режиме движения средняя угловая скорость маховика составляет . Максимальные и минимальные значения угловой скорости в установившемся режиме равны и
- Коэффициент неравномерности движения механизма становится равным
- Коэффициент динамичности в этом случае
Такое уменьшение, по сравнению с первоначальным случаем, коэффициентов неравномерности (в 9.5 раз) и динамичности ( в 16.2 раза) приводит к уменьшению максимальных значений модулей реакций внешних и внутренних связей приблизительно до 7.5 раз.
8. Список использованной литературы
1. Бертяев В.Д. Теоретическая механика на базе Mathcad практикум – СПб.: БХВ – Петербург, 2005;
2. Кирьянов Д.В. Самоучитель Mathcad 12. - СПб.: БХВ – Петербург, 2004.
3. Бать М.И., Джанелидзе Г.Ю., Кельзон А.С. Теоретическая механика в примерах и задачах. Т.2 (Динамика) – М.: Наука, 1990.
|