 АНОТАЦІЯ АНОТАЦІЯ
104 стор.,27 рис., 4 табл., 20 літер. джерел.
В роботі розглянуті проблеми побудови транспортної системи підприємства. Запропонована трьохрівнева транспортна система, представляюча собою транспортну мережу, пов`язану вертікальними та горизонтальними зв`язками. Проаналізовані теоретичні роботи в галузі транспортних систем, мереж та потоків.
Розроблено оригінальну математичну модель транспортної системи підприємства на трьох рівнях. Вона базується на основних положеннях теорії потенціалу. Приведено вираз для стаціонарної швидкості обігу матеріального транспорту.
Побудовано також імітаційну модель на базі програмного пакету Stratum. В результатів "прогону" моделі зроблено необхідні візуалізації. Приведені результати залишків транспортуємих матеріалів на різних рівнях розглянутої транспортної системи. Ці показники зрівняні з фактичними.
Ключьові слова: ТРАНСПОРТНА СИСТЕМА, ЦІНОВИЙ ПОТЕНЦІАЛ, ЩІЛЬНІСТЬ ВАНТАЖОПОТОКУ, ТРАНСПОРТНІ МЕРЕЖІ.
 ЗМІСТ ЗМІСТ
ВСТУП
РОЗДІЛ 1. АНАЛІЗ ТРАНСПОРТНИХ СИСТЕМ ТА ІХ МОДЕЛЮВАННЯ
1.1 Керування транспортною системою
1.1.1.Характеристика транспорту як об'єкту керуваня
1.1.2 Моделювання транспортної системи
РОЗДІЛ 2. Транспортні потоки, планування та оптимізація
2.1 Задачі планування незалежних транспортних потоків
2.2 Узагальнені задачі про потоки
2.3 Багатопродуктові потоки
2.4 Задача планування перевезень як задача оптимізації взаємозалежних потоків на мережі
2.5 Двохрівнева система моделей планувания транспортних потоків
2.6 Модель нижнього рівня - оптимізація транспортних потоків на транспортних мережах окремих видів транспорту
2.7 Основні задачі оптимізації транспортних потоків
2.8 Математичні моделі, у яких враховується взаємозв'язок потоків
РОЗДІЛ 3 МАТЕМАТИЧНА МОДЕЛЬ ТРАНСПОРТНОЇ СИСТЕМИ ПІДПРИЄМСТВА
3.1 Структура моделі
3.2 Математичний опис моделі
3.3 Аналіз математичної моделі
РОЗДІЛ 4 ПОБУДОВА ІМІТАЦІЙНОЇ МОДЕЛІ ТРАНСПОРТНОЇ СИСТЕМИ
4.1 Основні властивості середовища проектування
4.2 Побудова імітаційної моделі
4.3 Аналіз результатів прогону імітаційної моделі
ВИСНОВКИ
СПИСОК ЛІТЕРАТУРИ
 ВСТУП
ВСТУП
В даний час транспортні системи займають головне положення у світовій економіці. Вони носять глобальний по суті справи характер і мають першорядне значення в незалежності чи то це транспорт енергоресурсів матеріалів, грошей або транспортні інформаційні системи, що у даний час бурхливо розвиваються. Проте як у нових у системах, що розвиваються, так і традиційних існує цілий комплекс проблем, що потребують невідкладного рішення. І більшість із них це економічні проблеми або проблеми, що зводяться до економічних, без залежності від їхньої початкової природи, що може бути також технічної.
Реклама

До таких проблем можна віднести оптимальну надійність транспортних систем, раціональний розподіл транспортної мережі, оптимізацію перевезень, що по також залишається актуальної, а також вибір основних параметрів транспортної мережі або транспортної системи.
В даний час розвиток інформаційних технологій поряд із визначеними успіхами традиційних фундаментальних досліджень дозволяє по новому глянути на старі задачі і запропонувати більш точні рішення, що засновуються на досягненнях зокрема таких наук як Економічна кібернетика.
У умовах сучасної України існують як глобальні транспортні системи, у тому числі газова, що потребує удосконалення так і реконструкції, а також множина локальних мереж окремих підприємств. Необхідно зазначити, що при переході до ринкової економіки вони були в ряді випадків порушені. Виниклі нові зв'язки потребують визначеного осмислювання і розробці наукових підходів, базуючихся на переважно економічних критеріях.
Цим підходом, поза всяким сумнівом, є імітаційне моделювання, що дозволить вирішити задачі прийняття зважених управлінських рішень по удосконалюванню вантажопотоків не тільки на глобальному, але і на локальному рівні окремого промислового підприємства або фірми. Потребує притягнення для виконання повнообсяжних рішень усіх сучасних інформаційних технологій.
РОЗДІЛ 1. АНАЛІЗ ТРАНСПОРТНИХ СИСТЕМ
ТА ІХ МОДЕЛЮВАННЯ
1.1.1 Характеристика транспорту як об'єкту керування
Транспорту належить особлива роль у народному господарстві країни, він зв'язує воєдино всі галузі народного господарства, забезпечуючи переміщення сировини, напівфабрикатів і готової продукції. Всі види транспорту: залізничний, морський, річкову, повітряну, автомобільну і трубопровідний тісно пов'язані між собою, створюючи єдину транспортну систему України. Вона являє собою сукупність шляхів повідомлення, транспортних вузлів, транспортних і вантажно-розвантажувальних засобів, що забезпечує перевезення вантажів і пасажирів із пунктів відправлення в пункти призначення і виконання відповідних вантажних операцій.
Реклама

Транспортній системі властиві риси, властиві будь-якій іншій виробничій системі. Проте в порівнянні з іншими галузями народного господарства транспорт володіє цілим поруч специфічних особливостей, породжуваних характером виробничого процесу.
1. У процесі свого функціонування транспортна система не створює нового матеріального продукту, її продукцією є самий процес переміщення вантажів і пасажирів.
2. На відміну від продукції інших галузей транспортна продукція не взаємозамінна: перевиконання плану перевезень якогось вантажу між одними пунктами не може компенсувати невиконання перевезень того ж вантажу між іншими пунктами. Ця продукція не існує окремо від транспорту і не може провадитися в запас, тобто невиконання перевезень в один період часу не може бути компенсовано перевиконанням їх в інший період часу.
3. Засоби виробництва транспортної галузі розосереджені по всій країні і за її межами, велика частина їх знаходиться в постійному переміщенні. Масштаби діяльності галузі, розбивка їх об'єктів, динамічний характер виробничого процесу, вплив великого числа випадкових чинників обумовлюють надзвичайну складність керування транспортної, системою.
Необхідність опрацювання великого обсягу інформації, необхідної для прийняття керуючих рішень, за короткий період часу унеможливлює ефективне керування роботою транспорту без застосування математичних методів і сучасного обчислювальної техніки.
В даний час на кожному виді транспорту створені і продовжують розвиватися автоматизовані системи керування. Проте наявність відомчої роз'єднаності не дозволяє повною мірою оптимізувати транспортний процес. Недостатня координація роботи різних видів транспорту призводить до виникнення нераціональних перевезень, неефективному використанню транспортних засобів і зниженню швидкості перевезень. Затримки вантажів і простої рухливого складу в транспортних вузлах часто поглинають економію, одержувану за рахунок оптимізації перевезень у межах кожного виду транспорту.
В даний час назріла об'єктивна необхідність у створенні єдиної автоматизованої системи керування усіма видами транспорту, що повинна об'єднати АСУ окремих « видів транспорту і забезпечити ефективне використання всіх наявних ресурсів.
У основу функціонування єдиної АСУ транспортом країни повинний бути призначений принцип раціонального сполучення централізованого рішення загальнотранспортних задач і децентралізованого рішення задач кожного виду транспорту при дотриманні інтересів як народного господарства в цілому, так і кожного виду транспорту окремо.
До числа загальнотраснпортних задач, що повинні вирішуватися цією системою, ставляться:
- забезпечення взаємообміну АСУ різноманітних видів транспорту координація діяльності і розвитки різноманітних видів транспорту;
- оптимальний розподіл вантажопотоків між різними видами транспорту;
- визначення маршрутів і обсягів перевезень, виконуваних у змішаному повідомленні, тобто за участю декількох видів транспорту;
- ув'язування планів перевезення і перевалювання вантажів різноманітними видами транспорту;
- узгоджене керування роботою транспортних підприємств, що взаємодіють у транспортних вузлах;
- забеспечення взаємообміну АСУ різноманітних видів транспорту уніфікованою інформацією про роботу суміжних видів транспорту.
Створення автоматизованої системи керування транспортом країни зажадає рішення цілого ряду нових наукових проблем, зокрема розробки математичних методів і моделей для рішення задач оптимального керування транспортним процесом, у якому бере участь декілька видів транспорту.
Задача керування транспортною системою можна розділити на трьох основних класу: задача керування основною експлуатаційною діяльністю (перевезенням, перевалюванням і збереженням вантажів), розвитком транспортної системи (транспортних мереж, рухливого складу, вантажно-розвантажувальних устроїв і т.п.) і підтримкою працездатності транспортної системи (ремонтними роботами, постачанням, енергозабезпечення і т.п.).
Надалі ми обмежимося розглядом тільки задач керування основною експлуатаційною діяльністю, оскільки, з одного боку, саме в ході цієї діяльності створюється транспортна продукція, а з іншого боку, у зв'язку зі специфікою транспорту як галузі народного господарства задачі керування цією діяльністю відрізняються від більшості задач керування, що виникають в інших галузях.
Об'єктом керування основною експлуатаційною діяльністю є транспортний процес, тобто процес переміщення вантажів і пасажирів із пунктів зародження грузо- і пасажиропотоків у пункти їхній поглинання.
Через складність об'єкта керування якість керування їм оцінюється не по одному, а по цілому ряді показників, таких, як прибуток від виконання перевезень, експлуатаційні витрати, грузо- і пассажирообіг, обсяг перевезень, середня дальність перевезення 1 т вантажу, собівартість перевезень і ін.
Специфічною особливістю задач керування транспортним процесом, що відрізняє їх від задач керування в більшості інших галузей народного господарства, є те, що ці задачі формулюються як задачі керування різноманітними транспортними потоками (тобто потоками вантажів, пасажирів, транспортних засобів і т.п.), що переміщаються по транспортній мережі.
До числа основних із цих задач ставляться:
- розподіл вантажопотоків між видами транспорту;
- розподіл обсягів перевезень між виробничими підприємствами усередині кожного виду транспорту;
- керування перевезеннями, виконуваними транспортним підприємством, у тому числі визначення оптимальних маршрутів, графіків і розкладів прямування окремих транспортних засобів.
Складність цих задач і велика кількість що враховуються чинників унеможливлюють їхнє ефективне рішення без використання математичних методів оптимізації, в основу яких призначені моделі транспортних мереж і транспортних потоків.
1.1.2 Моделювання транспортної системи
Основу єдиної транспортної системи складає транспортна мережа: залізні й автомобільні дороги, внутрішні водяні шляхи, повітряні лінії, трубопровідні магістралі, залізничні станції, морські і річкові порти, шлюзи, аеродроми, насосні станції, пристані і т.п.
Моделлю транспортної мережі єдиної транспортної системи країни може служити граф G (K, А), множина вершин K якого являють собою транспортні вузли (станції, порти і т.п.), а множина дуг А - ділянки шляхів переміщення транспортних потоків (потоків рухливого складу, вантажів, пасажирів ) із пунктів відправлення в пункти призначення. Вершини мережі відповідають пунктам виробництва і споживання продукції, складам для збереження вантажів і пунктам зосередження транспортних засобів. Дугам мережі приписані такі характеристики, як протяжність, пропускна спроможність, витрати на переміщення транспортних засобів і т.п. Якщо переміщення транспортних засобів між пунктами може відбуватися тільки в однім напрямку, дуга транспортної мережі називається орієнтованой, у противному випадку - неорієнтованой.
Для зображення вершин (або вузлів) орієнтованих і неорієнотованих дуг використовуються відповідно кружки, лінії зі стрілками і лінії без стрілк. У більшості випадків можна замінити одну неориєнтовану дугу двома орієнтованими і напроти спрямованими дугами. У зв'язку з розподілом єдиної транспортної системи України на підсистеми, що відповідають окремим видам транспорту, транспортна мережа G(К, А) розпадається на ряд окремих підмереж Gм
(Км
, Ам
), що обслуговуються різноманітними видами транспорту М = 1,..., . Ці підмережі мають загальні вершини, що подають транспортні вузли, у яких відбувається перевалювання вантажів з одного виду транспорту на інший. Для зручності побудови моделей планування перевезень вантажів кожний вузол реальної транспортної мережі, у якому відбувається взаємодія декількох видів транспорту, можна уявити в графі G (K, А) у виді декількох вершин, кожна з який відповідає виду транспорту. Ці вершини сполучені між собою парою напроти орієнтованих дуг, що означають перевалювання вантажів з одного виду транспорту на інший [1]. Як приклад на рис. 1.1, а приведена схема загально транспортного вузла, у якому взаємодіють три види транспорту (залізничний, автомобільний і річковий), на рис.. 1.1, б - його уявлення в мережі G (K, А), де можливе перевалювання вантажів позначений штриховими стрілками. . Ці підмережі мають загальні вершини, що подають транспортні вузли, у яких відбувається перевалювання вантажів з одного виду транспорту на інший. Для зручності побудови моделей планування перевезень вантажів кожний вузол реальної транспортної мережі, у якому відбувається взаємодія декількох видів транспорту, можна уявити в графі G (K, А) у виді декількох вершин, кожна з який відповідає виду транспорту. Ці вершини сполучені між собою парою напроти орієнтованих дуг, що означають перевалювання вантажів з одного виду транспорту на інший [1]. Як приклад на рис. 1.1, а приведена схема загально транспортного вузла, у якому взаємодіють три види транспорту (залізничний, автомобільний і річковий), на рис.. 1.1, б - його уявлення в мережі G (K, А), де можливе перевалювання вантажів позначений штриховими стрілками.

Рис 1.1. Мережа загальнотранспортного вузла
У загальному випадку транспортна мережа являє собою мультиграф (граф із декількома дугами між одною парою вершин), що містить цикли.
Приклад фрагмента мережі G (K, А) для трьох видів транспорту приведений на рис.1.2. Вершини, у яких зароджуються транспортні потоки, називаються «джерелами», а вершини, у яких вони поглинаються, - «стоками». Окремі об'єкти, що переміщаються, або «протікають», із пунктів зародження транспортних потоків у пункти їхній поглинання, називаються «одиницями потоку». Будемо використовувати символ  для позначення вершини i = 1,...,n « графа G (K, А) і символ (i, j) для позначення вершини i = 1,...,n « графа G (K, А) і символ (i, j)  А для позначення орієнтованої дуги, що веде з А для позначення орієнтованої дуги, що веде з  , до , до  -. Упорядкована послідовність вершин і спрямованих дуг мережі -. Упорядкована послідовність вершин і спрямованих дуг мережі  (1, 2), (1, 2),  , (2, 3),..., , (2, 3),...,  , ( n-1, n), , ( n-1, n), , така, що кінець попередньої дуги є початком наступної, називається шляхом (або маршрутом), що веде з вершини у вершину . При , така, що кінець попередньої дуги є початком наступної, називається шляхом (або маршрутом), що веде з вершини у вершину . При  послідовність називається орієнтованим циклом або кільцевим маршрутом. Якщо будь-які дві вершини мережі можна з'єднати шляхом, те мережа називається зв`язаною. Якщо мережа не є зв`язаною, те її можна розбити на зв'язкові підмережі або компоненти зв`язані. Прикладом незв'язної транспортної мережі може служити підсікти шляхів повідомлень річкового транспорту, що складає з декількох не з`єднаних річкових басейнів. послідовність називається орієнтованим циклом або кільцевим маршрутом. Якщо будь-які дві вершини мережі можна з'єднати шляхом, те мережа називається зв`язаною. Якщо мережа не є зв`язаною, те її можна розбити на зв'язкові підмережі або компоненти зв`язані. Прикладом незв'язної транспортної мережі може служити підсікти шляхів повідомлень річкового транспорту, що складає з декількох не з`єднаних річкових басейнів.

Рис 1.2 Фрагмент мережі
Для аналізованого планового періоду відомо кількість вантажу, що потрібно відправити або доставити в ті або інші вузли мережі G (К, А). Перевезення і перевалювання вантажів здійснюється по дугах А мережі, пропускні спроможності яких обмежені. Вони вимірюються кількістю вантажу або транспортних засобів, що може бути переміщене по ним у період планування. На дугах, що відповідають перевезенням, ці обмеження виникають внаслідок обмежених можливостей ділянок перевезень, а на дугах перевалювання - внаслідок обмеженої переробної спроможності вантажно-розвантажувальних устроїв. Для кожної дуги мережі задані розміри, що виражають питомі грошові витрати і прибутки від перевезення (або перевалювання) одиниці вантажу відповідного роду визначеним видом транспорту. Якщо даний вантаж не може перевозитися по якийсь дузі, то вартість його перевезення покладається рівної достатньо великому позитивному числу, а прибуток від перевезення - достатньо великому негативному числу.
Рахується також, що задані пропускні спроможності вузлів транспортної мережі, що є слідством обмеженої ємності складів і власної обмеженої можливості транспортного вузла по переробці транспортних засобів і вантажів.
Розмірність загальнотранспортної мережі є надзвичайно велика. Наприклад, тільки на залізничній мережі число станцій нараховує декілька тисяч. При полігоні в 1000 пунктів, кожні два з який пов'язані тільки одною дугою (у дійсності їх може бути і більше), число маршрутів складає біля мільйона. У масштабах країни число вершин і дуг графа, що подає транспортну мережу, значно вище.
Внаслідок надзвичайно великої розмірності мережі G (K, А) важливими проблемами, що виникають при оптимальному планування перевезень, є агрегировання (об'єднання вузлів мережі і дуг) із метою скорочення їхні числа і декомпозиція (розбивка мережі G (K, A) на підмережі) із метою скорочення розмірності рішення кожної окремої задачі.
Найкращої є мережа, у якій виділені всі постачальники і споживачі вантажів. Теоретично це підвищує точність планових розрахунків. Проте число постачальників і споживачів може досягати десятків, а й навіть сотень тисяч, що робить розрахунок перевезень по такій мережі неможливим без агрегування.
Найбільше прийнятним варто вважати агрегування постачальників і споживачів по адміністративно-територіальній ознаці. Це може означати, що в якості пункту споживання (або виробництва) приймається або адміністративний центр регіону (області), або деякий умовний пункт. При цьому за основу можна прийняти існуючий розподіл транспортної мережі на мережі економічних районів, областей. Основу єдиної транспортної мережі складає магістральна мережа, по якій відбувається обмін продукцією між економічними районами (регіонами). Вона є мережею достатньо високого ступеня агрегування, а більш низьким ступенем укрупнення є магістральна мережа значного економічного району, у якому обмін вантажами здійснюється між низовими територіально-виробничими комплексами. Мережею третього порядку розукрупнення може бути місцева транспортна мережа, що подає собою сукупність шляхів повідомлення економічних підрайонів між господарськими пунктами.
Чим більше період планування, тим більше укрупненої повинна бути транспортна мережа. Відповідно до цого поточне планування переважно має справа з магістральними міжрайонними і внутрішніми мережами, а оперативне планування - із внутрішніми і місцевої транспортними мережами.
На основних видах транспорту, крім трубопровідного, транспортний процес має дискретний характер, тобто визначена кількість вантажів (пасажирів) і рухливого складу відправляються в окремі моменти часу.
У тих випадках, коли розмір періоду планування значно перевищує тривалості - транспортних операцій, можна не враховувати позицію кожного що переміщається об'єкта в окремі моменти часу і перейти до розгляду деякого стаціонарного безупинного транспортного потоку.
При оперативному плануванні і регулюванні тривалість транспортних операцій стає порівнянної з періодом планування і регулювання, і необхідно розглядати динамічні потоки вантажів, пасажирів і транспортних засобів.
Всі транспортні потоки, що існують на транспортній мережі, діляться на декілька основних груп: потоки вантажів, потоки контейнерів, у яких знаходяться вантажі, потоки транспортних засобів, пасажиропотоки і т.д.
На залізничному транспорті існують такі потоки:
- вантажів;
- пасажирів;
- вагонів, що обслуговують перевезення вантажу на всьому протязі залізничної частини перевезення до перевалювання на інший вид транспорту (за винятком залізничного порома) або пункту розаантаження;
- локомотивів, що можуть змінюватися й у середині залізничного етапу перевезення в зв'язку з переформуванням вантажних поїздів, переходом поїзда на ділянку з іншим видом тяги, на пар і т.д.;
- контейнерів, шлях проходження яких при прямих і змішаних перевезеннях (без розвантаження з контейнерів або навантаження в них у проміжних пунктах) збігається з потоком вантажів. Проте на відміну від вантажу контейнери повинні бути відправлені обернуті з іншим вантажем або порожняком. Це ставиться і до інших видів тари, що підлягає поверненню, а також до контейнерів.
На водяному транспорті існують потоки вантажів, контейнерів, пасажирів, самохідних барж, несамохідних барж і буксирів.
На автомобільному і повітряному транспорті існують потоки автомобілів і літальних апаратів, контейнерів і вантажів.
На трубопровідному транспорті існує поки тільки потік вантажів, але з упровадженням пневматичних і інших трубопроводів поряд із потоком вантажів буде існувати і потік тари.
Кожний із цих потоків може бути, у свою чергу, розділений на підгрупи відповідно до роду вантажу, типом транспортних засобів і т.п.
Слід зазначити, що потоки, що існують на транспортній мережі, не є незалежними, а тісно пов'язані між собою. Очевидно, наприклад, що для існування вантажопотоку або пасажиропотоку в якій ланки транспортної мережі необхідно, щоб по ньому протікав також потік транспортних засобів.
2.1
Задачі планування незалежних транспортних потоків
Однієї з поширених практичних задач, що зводяться до оптимізації незалежних транспортних потоків, є пошук максимального транспортного потоку з пункту його зародження в пункт поглинання, наприклад визначення максимального потоку вантажів, що може бути перевезений із пункту відправлення в пункт призначення по транспортній мережі з обмеженою пропускною спроможністю.
Ця задача формулюється в такий спосіб.
Задано транспортну мережу G (V, Е), у якій п = |V| - число вершин, а т =| Е| - число дуг. Кожній дузі (i,j)  Е поставлено у відповідність невід’ємне число Е поставлено у відповідність невід’ємне число  , називане її пропускною спроможністю і відповідною максимальною кількістю одиниць транспортного потоку, що може пройти по дузі. , називане її пропускною спроможністю і відповідною максимальною кількістю одиниць транспортного потоку, що може пройти по дузі.
Вершина s та V, із якої починається переміщення однорідного потоку, називається джерелом, а вершина t V, у якій воно закінчується, - стоком.
Шляхом із s и t в G (V, Е) називається послідовність вершин і дуг, така, що
s ≡ i1;(i1, i2); i2; (i2i3),…,(in-1
,in
);in
≡t...
Однорідним транспортним потоком у мережі G (V, Е) називається множина чисел xij, таких, що
 j ≠ s,t j ≠ s,t

Кількість потоку, що виходять із джерела або входять у стік,

Під задачею про максимальний потік розуміється задача пошуку в G (V, Е) потоку максимального розміру v, що протікає з s у t.
Існує багато різноманітних алгоритмів пошуку максимального потоку. Найбільше поширені з них перераховані в табл. 1 із указівкою джерела й оцінки числа операцій. Уявлення про тривалість обчислень можна одержати з табл..2 [10]
Таблиця.1-Алгоритми пошуку максимального потоку
| Автор алгоритму |
Помилка в загальному випадку |
m=n |
m=n2 |
k=m+n |
Форд-Фалкенсон
Эдмонс-Карп
Диниц
Карзанов
Черкаський
Галил
|
[4]
[5]
[6]
[7]
[8]
[9]
|
0(vm)
0( ) )
0( ) )
0( ) )
0( ) )
0( ) )
|
0()
0()
0()
0( ) )
0( ) )
|
0( ) )
0( ) )
0()
0( ) )
0()
|
0( ) )
0()
0()
0( ) )
0( ) )
|
Таблиця.2-Тривалість обчислень
| Число вершин |
Число
дуг
|
Алгоритм Форда-Фалкенсона, модифікація Эдмонса-Карпа, c |
Алгоритм Диница, c |
Алгоритм Карзанова, c |
Алгоритм Черкаського, c |
100
200
300
400
500
600
700
800
900
1000
|
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
|
17,0
68,3
154,7
285,1
-
-
-
-
-
-
|
4,2
9,6
14,3
20,0
24,9
41,0
41,7
46,7
57,3
54,5
|
5,3
11,8
17,7
24,8
30,0
48,0
50,9
59,6
69,7
66,9
|
2,7
7,4
9,4
14,7
22,7
14,1
24,5
34,5
38,4
43,5
|
Більш загальною задачею оптимізації однорідного транспортного потоку є задача пошуку такого потоку на транспортній мережі, витрати на переміщення якого є мінімальними. До задачі подібного роду зводяться, наприклад, задача визначення обсягів і шляхів доставки вантажів із пунктів відправлення в пункти призначення, що забезпечують мінімум транспортних витрат, а також задача визначення маршрутів прямування і кількості, використовуваних транспортних засобів, при яких загальні експлуатаційні витрати на одну перевізку вантажів мінімальні.
Відмінність даної задачі від попередньої полягає в тому, що для кожної дуги (i,j) Е задана вартість  переміщення одиниці транспортного потоку і необхідно знайти потік заданого розміру v із джерела s у стік t, що мінімізує зважену суму потоків переміщення одиниці транспортного потоку і необхідно знайти потік заданого розміру v із джерела s у стік t, що мінімізує зважену суму потоків
Для рішення цієї задачі запропонована множина різноманітних алгоритмів і їхніх узагальнень. Серед. них алгоритми, засновані на застосуванні прямих і двоїстих симплекс-алгоритмів лінійного програмування й алгоритмів пошуку найкоротших шляхів. Одним із поширених алгоритмів є так називаний алгоритм дефекту [4], що дозволяє вирішувати задач про потік мінімальної вартості достатньо загального виду. Число операцій алгоритму дефекту оцінюється як 0( ), де число К0
, обумовлене на перших ітераціях алгоритму, не перевищує ), де число К0
, обумовлене на перших ітераціях алгоритму, не перевищує  , п - число вершин мережі, т - число її дуг, а , п - число вершин мережі, т - число її дуг, а
Очевидно, можна замість 0() використовувати оцінку 0( ). У [5] запропонована модифікація алгоритму дефекту з оцінкою числа операцій 0 ( ). У [5] запропонована модифікація алгоритму дефекту з оцінкою числа операцій 0 ( ). ).
Алгоритми пошуку потоку мінімальної вартості застосовуються для рішення задач у дуже великих мережах. У роботах [11, 12] повідомляється про рішення прямими алгоритмами задач із 20000 вершин 450 000 дуг, а в [13] - про рішення однієї задачі з 3000 вершин і 35 000 дуг за 97 с на IВМ-360/67 і іншої задачі з 5000 вершин та 15 000 дуг за 113 с.
Пошук найкоротших шляхів. Окремими випадками задачі про транспортний потік мінімальної вартості, що подають і самостійний інтерес, є задача перебування найкоротшого шляху між двома пунктами транспортної сети G (V, Е) і задача пошуку маршруту, що забезпечує мінімальний час переміщення транспортного потоку. Довжиною шляху є сума довжин дуг, що входять у нього.
Кожній дузі (i, j) мережі поставлена у відповідність її довжина  , або тривалість проходження одиниці транспортного потоку, що у загальному випадку може бути позитивним і негативним числом. , або тривалість проходження одиниці транспортного потоку, що у загальному випадку може бути позитивним і негативним числом.
У ряді відомих алгоритмів робиться додаткове припущення про те, що G (V, Е) не містить циклів негативної довжини.
Очевидно, що якщо в джерело помістити одиницю потоку, а в стік одиничний попит, пропускні спроможності всіх дуг вважати безкінечними і відшукувати припустимий потік мінімальної вартості (за умови, що lij - вартість переміщення потоку), те, розв'язавши задачу про потік мінімальної вартості, знайдемо найкоротший шлях прямування цієї одиниці.
Проте у розрахунковому відношенні більш ефективними виявилися спеціальні, так називані комбінаторні алгоритми, аналізовані в даному розділі. У цих алгоритмах вихідні дані подані у виді списків дуг, тобто для кожної вершини дається список тих дуг (i, j), що інцидентні їй, разом із їхніми довжинами . Оцінки числа операцій алгоритмів приведені в табл. 3.Спочатку роздивимося основні алгоритми рішення задачі пошуку найкоротшого шляху між двома вершинами: 1 (джерело) і п (стік).
Таблиця 3 - Оцінки числа операцій алгоритмів
| Автор алгоритму |
Оцінка числа операцій |
Автор алгоритму |
Оцінка числа операцій |
| Найкоротший шлях між двома вершинами |
Найкоротші шляхи між усіма парами вершин |
Беллман [14]
Дийкстра [15]
Беллман-Форд [16]
|
0(n2)
0(m log n)
0(m n)
|
Дийкстра [17]
Спира [18]
Флойд-Варшал [19,20]
Фридман [21]
|
0(mn log n)
0(n2(log n)2)
0(n2)
0(n)2,5
|
Метод Белмана. Скористаємося рівнянням Белмана для визначення найкоротшого шляху між вершинами 1 і n. Визначимо  - довжину найкоротшого шляху з вихідної вершини 1 у вершину j за умови, що вершини пронумеровані числами 1, 2, 3,..., п. Шлях найкоротшої довжини знаходиться з такого рівняння: - довжину найкоротшого шляху з вихідної вершини 1 у вершину j за умови, що вершини пронумеровані числами 1, 2, 3,..., п. Шлях найкоротшої довжини знаходиться з такого рівняння:
 j=2,3,…,n;uj
=0 j=2,3,…,n;uj
=0
У результаті розрахунків знаходиться (якщо воно існує) дерево найкоротших відстаней із коренем у вершині 1, у якому довжина єдиного шляху з 1 у j дорівнює uj, j=2, 3,..., п.
Алгоритми Дийкстра. Роздивимося мережу G (V, Е), у котрої довжини lijусіх дуг позитивні. Тоді відомий алгоритм Дийкстра може бути записаний у такий спосіб.
Крок 0. Покласти

якщо (i
,j
)
у іншому випадку,
|
|
 S={1,2,3…,n}
Крок 1. Знайти , для котрого = , для котрого =   , якщо uk =+ , якщо uk =+ - стіп; не існує шляху у вершини, що залишилася в S. Положимо S = S - {k}. Якщо S = - стіп; не існує шляху у вершини, що залишилася в S. Положимо S = S - {k}. Якщо S =  - стіп; обчислення закінчені. - стіп; обчислення закінчені.
Крок 2. Покласти = min{ } для всіх (k, j) } для всіх (k, j)  Е. Перейти до кроку 1. Е. Перейти до кроку 1.
При раціональному засобі організації обчислень алгоритм оцінюється в 0 (т 1оg п) операцій. Зауважимо, що для мережі G (V, Е), що є плоским графом, алгоритм обчислення найкоротших шляхів із 1 у всі інші вершини потребує 0 (п 1оg п) операцій.
Якщо припустити, що мережа G (V, Е) є ациклічний тобто не містить циклів, то в ній можна пронумерувати вершини так, що для кожної дуги з i у j виконується умова i < j. Очевидно, таке упорядкування може бути виконане за 0 (т) операцій. Тоді для приклада рівняння Белмана можуть бути вирішені простим обчисленням: и1
= 0, и2
залежить тільки від и1
, и3
залежить від и1
, и2
, иj залежить від и1
, и2
,..., иj-1
і т.д. Таким чином, рішення може бути отримане за 0 (т) операцій.
Метод Белмана - Форда. Роздивимося мережу G (V, Е), у котрої або відсутні цикли, або довжини дуг ненегативні. Метод послідовних наближень, запропонований Белманом і Фордом, складається в такому.
Нехай uj(k)
- довжина найкоротшого шляху від вихідної вершини до вершини j за умови, що шлях містить не більш ніж k дуг. Спочатку положимо
Тоді  та та  . Для дуг k = 2, 3,...,n- 1 необхідно 0 (n) ітерацій. Кожна ітерація потребує 0 (m) операцій. Отже, метод потребує 0 (т п) операцій. Зауважимо, що для плоских графів потрібно 0 () операцій. . Для дуг k = 2, 3,...,n- 1 необхідно 0 (n) ітерацій. Кожна ітерація потребує 0 (m) операцій. Отже, метод потребує 0 (т п) операцій. Зауважимо, що для плоских графів потрібно 0 () операцій.
Він [17] запропонував модифікацію цього методу, що скорочує загальне число додавань і порівнянь приблизно в чотирьох разу у випадку повної мережі й у два рази в довільному випадку.
Задача визначення найкоротших шляхів між усіма парами вершин. Більш загальною задачею про пошук найкоротших шляхів є задача визначення найкоротших маршрутів або шляхів якнайшвидшої доставки вантажів між усіма парами вузлів транспортної мережі.
Не розглядаючи кожний з алгоритмів пошуку найкоротших шляхів, приведених у табл. 3, опишемо ідеї їхньої побудови.
Будемо шукати найкоротші шляхи між вершинами в мережі з позитивними і негативними довжинами дуг, починаючи з вершини 1. Очевидно, буде потрібно 0 (тп) обчислень для того, щоб знайти найкоротші шляхи з вершини 1 у всі інші вершини. Замінимо довжину кожної дуги  на на  . Довжина шляху з i у j, визначена за значеннями . Довжина шляху з i у j, визначена за значеннями  , відрізняється від щирої довжини на константу , відрізняється від щирої довжини на константу  . Отже, рішення задачі визначення всіх найкоротших пар шляхів із довжинами є рішенням вихідної задачі. Оскільки тепер усі довжини дуг невід’ємних, можна застосувати метод Дийкстра для кожній з останніх п - 1 задач. У результаті вся задача буде вирішена за 0 ( . Отже, рішення задачі визначення всіх найкоротших пар шляхів із довжинами є рішенням вихідної задачі. Оскільки тепер усі довжини дуг невід’ємних, можна застосувати метод Дийкстра для кожній з останніх п - 1 задач. У результаті вся задача буде вирішена за 0 ( ) операцій, а для плоского графа за 0 ( ) операцій, а для плоского графа за 0 ( ) операцій. У [18] запропонований алгоритм для невід’ємних дуг мережі G (V, Е), у якому очікуване число обчислень дорівнює 0 ( ) операцій. У [18] запропонований алгоритм для невід’ємних дуг мережі G (V, Е), у якому очікуване число обчислень дорівнює 0 ( ). ).
Нехай мережа G (V, Е) складається з неорієнтованих дуг і ми хочемо знайти найкоротший шлях між двома визначеними вершинами. Якщо всі довжини дуг невід’ємних, те можна замінити кожну неорієнтованих дугу парою симетричних орієнтованих дуг (i,j) і (j, i) із  і застосувати будь-який із зазначених вище алгоритмів. і застосувати будь-який із зазначених вище алгоритмів.
Проте якщо довжина дуги (i,j) негативний, те цей підхід нездатний, тому що в мережі з'явиться негативний цикл (i,j), (j, i)
У загальному випадку можна скористатися, наприклад, методом Белмана- Форда для визначення існування циклу негативної довжини в G (V, Е). Якщо мережа є сильнозв`язною, то цикл негативної довжини існує тоді і тільки тоді, коли uj(n)
< uj(n-1)
для деякої вершини j. Мережа може бути перевірена на існування негативного циклу за 0 (тп) операцій.
У розглянутих вище задачах передбачалося, що однорідний транспортний потік, що виходить із дуги (i, j) Е, дорівнює потокові, що входить у цю дугу. Проте в ряді практичних ситуацій це припущення не виконується. Наприклад, при транспортуванні вантажів може відбуватися їхнє псування або втрата (наприклад, вивітрювання), що призводить до зменшення потоку під час його переміщення по дузі (i, j) транспортної мережі G (V, Е).
Тому для рішення подібних задач необхідно відмовитися від припущення, відповідно до якого при проходженні по дугах мережі G (V, Е) потік залишається незмінним, і припустити, що кількість однорідного потоку, що проходить по дузі, може збільшуватися або зменшуватися.
Будемо вважати, що якщо в будь-яку дугу (i, j) Е з вершини i виходить  одиниць потоку, то з цієї дуги у вершину j увійде одиниць потоку, то з цієї дуги у вершину j увійде  одиниць потоку. Розмір одиниць потоку. Розмір  має назву коефіцієнта підсилення або просто посиленням дуги (i, j). має назву коефіцієнта підсилення або просто посиленням дуги (i, j).
Якщо > 1, то потік по дузі (i, j) посилюється. Якщо = 1, то потік по дузі (i, j) залишається незмінним. Якщо 0 < < 1, то потік по дузі (i, j) скорочується (частково поглинається). Якщо = 0, то потік по дузі (i, j) губиться (поглинається цілком) і дана дуга звичайно розглядається як стік. Якщо < 0, то для кожної одиниці потоку, що входить у вершину i, повинно потрапити одиниць потоку у вершину j, тобто в даному випадку дуга (i, j) може розглядатися яка влаштувала попит на потік.
Узагальнена задача про транспортний потік мінімальної вартості на мережі G (V, Е) може бути сформульована як задача лінійного програмування такого виду:

де vs - чистий вхідної потік у s, а vt- чистий вихідний потік із t.
Для рішення задач оптимізації транспортних потоків останнім часом розроблена так називана теорія мережного програмування -інтенсивно що розвивається область математичного програмування [22].
Мережне програмування значно розширило межа рішення великомасштабних оптимізаційних транспортних задач. Спеціально розроблені мережні алгоритми дозволяють вирішувати задача значно швидше, чим самі зроблені універсальні методи математичного програмування. Нові мережні алгоритми явилися подальшим розвитком прямого симплекс-методу для рішення задач лінійного програмування.
У нових методах істотно враховується особливість структури мережних задач (структури матриці обмежень і структури базису). Перестановкою рядків і стовпчиків матриця базису може бути подана в блочно-діагональному виді. Кожний із блоків має або трикутний вид, або близький до трикутного, і базису може бути поставлене у відповідність квазідерево (дерево з додатковою дугою), для операцій на який можна використовувати ефективні спискові процедури.
Крім цього, при реалізації алгоритмів на ЕОМ використаний великий досвід програмування мережних задач, що дозволив знайти зроблену технологію збереження, розміщення, пошуку і зміни даних.
Все це дозволило істотно зробити процес обчислень дешевшим за рахунок скорочення часу обчислення й обсягу використовуваної пам'яті ЕОМ.
Мережні алгоритми виявилися також дуже ефективними і для рішення таких окремих випадків задач про транспортні потоки на мережі G (V, Е), як задача про призначення і транспортна.
Був проведений обчислювальний експеримент, у процесі якого дорівнювалася стандартна програма рішення задачі лінійного програмування AРЕХ-III із мережними програмами на ЕОМ СDС CYВЕR-74 [23].
Результати експерименту за рішенням задачі про призначення, транспортної задачі, задача про потік мінімальної вартості й узагальненої задачі про потік приведені в табл. 4.
Таблиця 4 -задача про потік мінімальної вартості й узагальненої задачі про потік
| Тип задачі |
Кіл-ть рівнянь |
Кіл-ть змінних |
Линійне програмування |
Мережеві методы |
| Час рішення, с |
Вартість, $ |
Час рішення, с |
Вартість, $ |
| Задача про призначення |
400
400
|
1500
2250
|
231,85
336,37
|
41,73
60,55
|
1,16
1,34
|
0,21
0,24
|
| Транспортна задача |
200
200
200
|
1350
1500
2000
|
105,68
124,53
164,94
|
19,02
22,42
29,69
|
0,94
1,07
1,21
|
0,17
0,19
0,22
|
| Задача про поток мінімальной вартості |
400
1000
|
1306
2900
|
174,83
833,63
|
31,47
150,05
|
1,51
5,28
|
0,27
0,95
|
| Узагальнена задача |
100
100
100
250
250
500
1000
|
1000
1000
1000
4000
4000
5000
6000
|
62,65
62,65
94,72
453,02
742,61
1044,34*
1633,64**
|
11,28
14,57
17,05
81,54
133,67
186,98*
294,06**
|
7,51
7,29
9,70
16,65
14,74
22,55
50,22
|
1,35
1,31
1,75
3,00
2,65
4,06
9,04
|
Розглядалися до цих пір задачах транспортні потоки різноманітних видів (наприклад, що відповідають різноманітним типам транспортних засобів або різних вантажів) оптимізувати незалежно друг від друга або були зведені до деякого однорідного транспортного потоку. Більш загальною задачею є оптимізація сукупності транспортних потоків декількох видів з урахуванням наявності обмежень на загальну пропускну спроможність ланок транспортної мережі. Ця задача може бути сформульована у виді так називаної «задачі про багатопродуктовий потік» на мережі G (V, Е), що є задачею лінійного програмування спеціального виду.
Розмір потоку k-го продукту по дузі (i,j)  Е визначимо через, Е визначимо через,  а вартість переміщення одиниці k-го продукту по дузі (i, j) - через а вартість переміщення одиниці k-го продукту по дузі (i, j) - через  (k = 1,2,...,K). (k = 1,2,...,K).
Кожний із продуктів k має одне джерело  V і один стік V і один стік  V, причому попит k-го продукту V, причому попит k-го продукту  у рядку дорівнює пропозиції цього ж продукту в джерелі . у рядку дорівнює пропозиції цього ж продукту в джерелі .
Задача про багатопродуктовий потік мінімальної вартості складається в тому, щоб знайти такі значення (i,j) Е, k = 1, 2,…К щоб
2.4 Задача планування перевезень як задача оптимізації взаємозалежних потоків на мережі
Як уже відзначалося вище, одним із найбільше характерних прикладів області додатка задач про взаємозалежні потоки є планування перевезень, при котрому необхідно оптимізувати декілька взаємозалежних потоків на транспортній мережі: потік вантажів, що доставляються від постачальників до споживачів, потік контейнерів (або тари), у яких знаходяться вантажі, потік транспортних засобів, що перевозять вантажі або контейнери, і потік локомотивів або буксирів, що переміщають транспортні засоби, якщо вони не є самохідними.
У загальному випадку ці потоки не збігаються один з одним: як правило вони зароджуються і поглинаються в різноманітних вузлах транспортної мережі, при цьому деякі з них можуть існувати лише на визначених ділянках, що наприклад відповідають різноманітним видам транспорту.
Незважаючи на те що існування взаємозалежних потоків на транспортній мережі є об'єктивною реальністю, цей факт не найшов явного відображення у відомих математичних моделях перевезень. У роботах, присвячених цій проблемі, або оптимізується один із потоків, або різноманітні потоки прямо або побічно відображається один з одним. У більшості робіт (наприклад, [12 - 17]) розглядається окремий випадок, коли потоки вантажів зафіксована і задача планування перевезень зводитися до задачі оптимального розподілення транспортних засобів по напрямках перевезень. У роботі [24], навпаки, розглядається задача оптимального розподілу потоків вантажів по транспортних мережах різноманітних видів транспорту без урахування переміщень транспортних засобів.
У ряді робіт (наприклад, [14 - 17]) розглядаються більш загальні задачі, у яких наявність потоку вантажів враховується непрямою уявою шляхом виділення потоків навантажених і порожніх транспортних засобів.
Постановка задачі оптимізації потоків на транспортній мережі, що у явному виді враховує наявність взаємозв'язку між потоками, запропонована в [18]. Проблема оптимізації взаємозалежних транспортних потоків розглянута на прикладі задача оптимізації двох основних потоків на транспортній мережі: потоку вантажів і потоку транспортних засобів, що є окремим випадком задачі (5) - (11).
Сформульована в [18] задача оптимізації двох взаємозалежних потоків на мережі полягає в такому.
Задано спрямованого графа без петель G (K, А), де K - множина вершин, А - множина дуг, що складається з  підграфів підграфів  пов'язаних загальними вершинами пов'язаних загальними вершинами  . .
По дугах графа можуть протікати два роди потоків: первинний і вторинний (рис. 2.1), що можна інтерпретувати, наприклад, як потік ресурсів і потік продукції, для виробництва якої вони використовуються, потік транспортних засобів і потік перевезених ними вантажів, потік рідини і потік домішок, що утримуються в ній, потік носіїв інформації і потік переданої на

 Повторний потік \ Первинний потік Повторний потік \ Первинний потік
 1-й тип 1-й тип 2-й тип 2-й тип
 3-й тип 3-й тип
 1-й тип 1-й тип 2-й тип 2-й тип
 3-й тип 3-й тип
Рис. 2.1-Первинний і вторинний потоки
Потоки не є однорідними: на графі може існувати  видів повторного потоку і видів повторного потоку і  типів первинного потоку. При цьому повторний потік може протікати від джерел до стоків будь-якими припустимими шляхами, тоді як кожний тип первинного потоку може існувати лише на визначеному підграфі типів первинного потоку. При цьому повторний потік може протікати від джерел до стоків будь-якими припустимими шляхами, тоді як кожний тип первинного потоку може існувати лише на визначеному підграфі  (відповідно до цого всі типи первинного потоку 1,..., розділені на групи (відповідно до цого всі типи первинного потоку 1,..., розділені на групи  , М = , М = невзаємозамінює типів). невзаємозамінює типів).
Принциповою особливістю задачі, що відрізняє її від класичних задач про багатопродуктові потоки, є наявність взаємозв'язку між потоками: для підтримки повторного потоку по дузі (i, j), переміщення якого приносить «корисний ефект» («прибуток»), необхідно, щоб по ній протікав також первинний, що несе потік, переміщення якого пов'язано з визначеними «витратами».
Первинний потік  m-го типу по дузі (i, j) m-го типу по дузі (i, j)  , М =, складається з потоків «активної» , М =, складається з потоків «активної»  і «пасивної» і «пасивної»  складових: складових:

Розмір активної складового первинного потоку визначає розмір повторного потоку  по цій дузі, наявність пасивної складової обумовлена вимогою зберігання первинного потоку m-го виду. по цій дузі, наявність пасивної складової обумовлена вимогою зберігання первинного потоку m-го виду.
Активна і пасивна складові подають, наприклад, кількість ресурсів, використовуваних при виконанні робіт, і кількість вільних ресурсів, що переміщаються з однієї роботи на іншу (зокрема, кількості навантажених і порожних транспортних засобів).
Залежність між первинним і повторним потоками виражається в тому. що розмір повторного потоку по якийсь дузі (i, j) пропорційна активним складових різноманітних типів первинного потоку, що протікають по дузі:
Залежність між первинним і повторним потоками не є взаємно однозначної:
1) той самий повторний потік може підтримуватися різноманітними комбінаціями активних складових різноманітних типів первинного потоку;
2) повторний потік може протікати від джерел до стоків будь-якими шляхами, тоді як кожний тип первинного потоку може існувати лише на визначеному підграфі;
3) у процесі свого переміщення від джерела до стоку повторний потік може підтримуватися різноманітними типами первинного потоку, що переміняють один одного в проміжних вершинах (наприклад, на - дузі (7, 2) (див. мал. 3.4) повторний потік підтримується активної складового первинного потоку першого типу, а на дузі (2, 3) - активної складового первинного потоку другого типу);
4) первинний потік може існувати й у тих дугах, у яких повторний потік відсутніх (як, наприклад, у дузі (4, 5) на мал. 2.1).
На відміну від задачі (5) - (11) припускається лише часткове перетворення потоків різноманітних типів продуктів і без їхнього посилення або ослаблення: відмінні від нуля і рівні одиниці лише ті з коефіцієнтів перетворення, що зв'язують активну і пасивну складові того самого типу первинного потоку. Ці складові можуть переходити друг у друга у вершинах  , наприклад на початку і по закінченні робіт (зокрема, при навантаженні і розвантаженні потік порожніх транспортних засобів перетворюється в потік навантажених і навпаки) або при зміні одних ресурсів на інші (зокрема, при перевалюванні вантажів із транспортних засобів одного типу на транспортні засоби іншого типу). , наприклад на початку і по закінченні робіт (зокрема, при навантаженні і розвантаженні потік порожніх транспортних засобів перетворюється в потік навантажених і навпаки) або при зміні одних ресурсів на інші (зокрема, при перевалюванні вантажів із транспортних засобів одного типу на транспортні засоби іншого типу).
Задача полягає в перебуванні такої комбінації первинного і повторного потоків по дугах графа, що забезпечує одержання максимальної «прибули».
У [19] розглядалася більш загальна задача про взаємозалежні потоки на мережі, у якій поряд із не взамозамінює і цілком взаємозамінними типами первинного потоку, що існують на підграфі, що не перетинаються, розглядалися і частково взаємозамінні типи потоку, що існують на підграфах, що мають загальні дуги.
Незважаючи на свою специфічність, задача такого роду мають цілий ряд різноманітних і важливих практичних додатків. Вони виникають у сітковому плануванні і керуванні (коли поряд із послідовністю виконуваних робіт враховуються і переміщення ресурсів), керуванні виробництвом (коли оптимізується потік деталей або напівпродуктів, що проходять послідовне опрацювання, так і потік ресурсів, необхідних для цього опрацювання), керуванні потоками інформації (коли розглядається як потік інформації, так і потік носіїв) і, як уже відзначалося, у плануванні роботи транспорту (коли поряд із розподілом потоку вантажів по транспортній мережі оптимізуються переміщення транспортних засобів, що перевозять ці вантажі).
Для того щоб більш наочно уявити особливості структури даної задачі, роздивимося її окремий випадок, коли є лише один вид повторного потоку, а всі типи первинного потоку цілком взаємозамінні. При цих умовах задача про двох взаємозалежні потоки формулюється в такий спосіб.
Максимізувати
 (3) (3)
(де  - корисний ефект від переміщення одиниці повторного потоку і витрати на переміщення одиниці первинного потоку m-ого типу - корисний ефект від переміщення одиниці повторного потоку і витрати на переміщення одиниці первинного потоку m-ого типу  по дугах (i, j) A графа) при виконанні звичайних умов зберігання кожного з потоків, що проходять через вершину i графа: по дугах (i, j) A графа) при виконанні звичайних умов зберігання кожного з потоків, що проходять через вершину i графа:
  (6) (6)де  , , - попит і пропозиції для первинного і повторного потоків Ks+
I
, Ks-I, Ks+
II
і Ks-II- джерела і стоки для первинного і повторного потоків відповідно, а також обмежень на пропускну спроможність дуг - попит і пропозиції для первинного і повторного потоків Ks+
I
, Ks-I, Ks+
II
і Ks-II- джерела і стоки для первинного і повторного потоків відповідно, а також обмежень на пропускну спроможність дуг
 (8) (8)
і особливих обмежень, що відбивають розподіл первинного потоку на активну і пасивну складові
 (9) (9)
і залежність повторного потоку від активних складових різноманітних типів первинного потоку
 (10) (10)
Крім того, повинні виконуватися умови невід’ємності
 . (11) . (11)
Як неважко бачити, основною особливістю, що відрізняє дану задачу від звичайних задач про багатопродуктові потоки мінімальної вартості [24], є наявність специфічних обмежень (9), (10).
Розглянута задача може бути зведена до традиційних задач про потоки в мережах лише в деяких окремих випадках. Одним із найбільше істотних умов для цього є виконання вимоги, щоб перетворення активної складової в пасивну й обернено відбувалося тільки в джерелах і стоках для повторного потоку і не припускалася передача повторного потоку від ресурсів одного типу до ресурсів іншого типу, тобто щоб розмір активної складового первинного потоку (потоку ресурсів), що підтримує повторний потік від джерела до стоку, оставалась постоянной для повторного потоку і не припускалася передача повторного потоку від ресурсів одного типу до ресурсів іншого типу, тобто щоб розмір активної складового первинного потоку (потоку ресурсів), що підтримує повторний потік від джерела до стоку, оставалась постоянной
У цьому випадку умови зберігання повторного потоку еквівалентні умовам зберігання активної складового первинного потоку, що дає можливість не розглядати повторний потік у явному виді. Якщо в мережі існує лише один тип первинного потоку  , задача(3)-(11) зводиться до звичайної задачі про двохпродуктовий потік , задача(3)-(11) зводиться до звичайної задачі про двохпродуктовий потік  і і  : :

У ідеальному випадку, коли пасивна складова  відсутніх (тобто первинний потік цілком використовується для підтримки повторного потоку) або може бути задана апріорно, аналізована задача ще більш спрощується і переходить у задачу про однопродуктовий потік відсутніх (тобто первинний потік цілком використовується для підтримки повторного потоку) або може бути задана апріорно, аналізована задача ще більш спрощується і переходить у задачу про однопродуктовий потік  мінімальної вартості. мінімальної вартості.
Задача планування перевезень декількома видами транспорту. Основним напрямком підвищення ефективності роботи транспорту є поліпшення взаємодії різноманітних його видів із метою оптимального використання наявних ресурсів.
У зв'язку з цим однієї з найважливіших практичних задач є комплексне планування перевезень вантажів різноманітними видами транспорту (морським, залізничним і т.д.). Оскільки ця задача полягає, з одного боку, у виборі шляхів доставки задача полягає, з одного боку, у виборі шляхів доставки вантажів і розподілі вантажопотоків по транспортних мережах окремих видів транспорту, а з іншого боку, у виборі типів використовуваних транспортних засобів (судів, вагонів і т.п.) і їхніх переміщень при виконанні перевезень, для її рішення можуть бути використані, моделі оптимізації двох взаємозалежних потоків: потоку вантажів (повторного потоку) і потоку транспортних засобів (первинного потоку), що складається з двох складових: потоку навантажених транспортних засобів (активна складова) і потоку порожніх транспортних засобів (пасивна складова). Взаємозв'язок потоків вантажів і транспортних засобів виражається в залежності розміри потоку вантажів від розміру потоку навантажених транспортних засобів і в тому, що в пунктах навантаження-розаантаження потоки навантажених і порожніх транспортних засобів переходять друг у друга, а в пунктах перевалювання потік транспортних засобів одного виду транспорту переходить у потік транспортних засобів іншого виду транспорту.
Аналізована задача формулюється в такий спосіб [18].
Задано спрямованого графа G (К, А), що подає єдину транспортну мережу і складається з декількох подграфов  окремих видів, що подають транспортні мережі окремих видів транспорту транспорту (рис. 2.2). Дуги графа подають можливі шляхи переміщення транспортних засобів, а вершини - пункти i окремих видів, що подають транспортні мережі окремих видів транспорту транспорту (рис. 2.2). Дуги графа подають можливі шляхи переміщення транспортних засобів, а вершини - пункти i відправлення і призначення вантажів, пункти i відправлення і призначення вантажів, пункти i перевалювання вантажів і транзитні пункти перевалювання вантажів і транзитні пункти  . .

Рис 2.2-Транспортні мережі окремих видів транспорту транспорту
Перевезення вантажів із пункту відправлення в пункт призначення можуть здійснюватися різноманітними видами транспорту з послідовним перевалюванням у пунктах i з одного виду транспорту на інший. При цьому загальний обсяг вантажів, що перевалюються з одних видів транспорту на інші, не перевищує пропускної спроможності пункту перевалювання  в даний період в даний період
 (12) (12)
де =
=  , (13) , (13)
 - обсяг вантажів n-го роду, що перевалюються в i-м пункті з L,-го виду транспорту на M-й у t-м періоді.
- обсяг вантажів n-го роду, що перевалюються в i-м пункті з L,-го виду транспорту на M-й у t-м періоді.
У перевезенні вантажів між пунктами i і j M-м видом транспорту можуть брати участь різноманітні типи транспортних засобів т  моючих різну вантажопідіймальність bтп: моючих різну вантажопідіймальність bтп:
 (14) (14)
де  - кількість вантажів п-го роду, перевезених M-м видом транспорту в t-й період, - кількість вантажів п-го роду, перевезених M-м видом транспорту в t-й період,  - кількість транспортних засобів m-го виду, що перевозять вантажі n-го роду в t-й період. - кількість транспортних засобів m-го виду, що перевозять вантажі n-го роду в t-й період.
Потік  транспортних засобів m-го типу по дузі ділиться па потік навантажених і порожніх транспортних засобів m-го типу по дузі ділиться па потік навантажених і порожніх  транспортних засобів транспортних засобів
 (15) (15)
Кількість транспортних засобів m-го типу  , що починають або закінчують роботу в різноманітних вузлах i , що починають або закінчують роботу в різноманітних вузлах i транспортної мережі у період t, дорівнює плановому обсягу запровадження і висновка їх з експлуатації в аналізованому плановому періоді транспортної мережі у період t, дорівнює плановому обсягу запровадження і висновка їх з експлуатації в аналізованому плановому періоді  : :
 (16) (16)
Передбачається, що у випадку недостача транспортних засобів вони можуть бути орендовані в зовнішніх організацій, а вільні транспортні засоби можуть бути спрямовані в резерв.
Для кожного вузла i транспортної мережі  виконуються умови зберігання минущого через нього потоку вантажів у кожний період часу t (t = виконуються умови зберігання минущого через нього потоку вантажів у кожний період часу t (t =  ): ):
 (17) (17)
- для пунктів відправлення-призначення  ,загальних для транспортних мереж декількох видів транспорту ( ,загальних для транспортних мереж декількох видів транспорту ( - обсяг вивозу надпланових вантажів M-м видом транспорту в періоді t); - обсяг вивозу надпланових вантажів M-м видом транспорту в періоді t);
 (18) (18)
- для інших пунктів  відправлення-призначення; відправлення-призначення;
 (19) (19)
- для пунктів  , що є загальними для транспортних мереж декількох видів транспорту, але не є пунктами відправлення-призначення вантажів; , що є загальними для транспортних мереж декількох видів транспорту, але не є пунктами відправлення-призначення вантажів;
 (20) (20)
- для інших вузлів  транспортної мережі. транспортної мережі.
Аналоггічною уявою для кожного вузла i виконуються умови зберігання потоків навантажених і порожніх транспортних засобів кожного типу т , М = у період t (t = ):
а) навантажені транспортні засоби
 , (21) , (21)
- для пунктів  , у яких відбувається навантаження-розаантаження ( , у яких відбувається навантаження-розаантаження ( кількість транспортних засобів із вантажем n-го роду, що завантажуються і що розвантажуються в період t у пункті i); кількість транспортних засобів із вантажем n-го роду, що завантажуються і що розвантажуються в період t у пункті i);
 (22) (22)
для інших пунктів  ; ;
б) порожні транспортні засоби
 . (23) . (23)
- для пунктів - відправлення-призначення вантажів, у яких транспортні засоби вводяться і виводяться з експлуатації ( - відправлення-призначення вантажів, у яких транспортні засоби вводяться і виводяться з експлуатації (  - кількості транспортних засобів m-го типу, що спрямовуються в резерв і надходять із резерву, - кількості транспортних засобів m-го типу, що спрямовуються в резерв і надходять із резерву,  - кількість арендованих транспортних засобів); - кількість арендованих транспортних засобів);
 (24) (24)
-для інших пунктів  , у яких відбувається навантаження-розаантаження; , у яких відбувається навантаження-розаантаження;
 (25) (25)
- для інших пунктів  і запровадження і виводу транспортних засобів з експлуатації; і запровадження і виводу транспортних засобів з експлуатації;
 (26) (26)
-для інших пунктів  транспортної мережі. транспортної мережі.
Загальна кількість вантажів n-го роду ( ), що відправляються з різноманітних пунктів або що доставляються в них, не перевищує необхідних обсягів відправлення-доставки вантажів ), що відправляються з різноманітних пунктів або що доставляються в них, не перевищує необхідних обсягів відправлення-доставки вантажів  у заданому періоді у заданому періоді  . .
 (27) (27)
де  - кількість вантажів, що відправляються і що доставляються M-м видом транспорту. - кількість вантажів, що відправляються і що доставляються M-м видом транспорту.
Передбачається, що при наявності вільних транспортних засобів можна здійснити перевезення додаткових, надпланових вантажів (наприклад, вантажів іноземних фрахтувальників на морському транспорті).
Кількість вантажів, що зберігаються на складах у пункті  (без обмежень будемо припускати, що (без обмежень будемо припускати, що  ) у кожний період часу t, не перевищує загальної ємності складів у даний період ) у кожний період часу t, не перевищує загальної ємності складів у даний період
 (28) (28)
де  - кількість вантажів n-го роду ввезених на склади і вивезених із них M-м видом транспорту в період - кількість вантажів n-го роду ввезених на склади і вивезених із них M-м видом транспорту в період  , ,  - ємність складів у пункті i у період t, - ємність складів у пункті i у період t,  - можливе збільшення ємності складів (наприклад, шляхом оренди додаткових помешкань) у період t, - можливе збільшення ємності складів (наприклад, шляхом оренди додаткових помешкань) у період t, - початкова кількість вантажів n-го роду та складах. - початкова кількість вантажів n-го роду та складах.
У будь-який момент часу кількість вантажів кожного роду, що зберігаються на складах, невід’ємна:
 (29) (29)
Кількість транспортних засобів кожного типу, що знаходяться в резерві в пункті i, невід’ємна:
 (30) (30)
Загальний обсяг навантаження-розвантаження в кожному пункті i не перевищує пропускної спроможності вантажно-розвантажувальних устроїв
 (31) (31)
а загальна кількість транспортних засобів, що переміщаються по дузі (i,j) транспортної мережі, - пропускної спроможності цієї дуги
 (32) (32)
Крім того, на потік транспортних засобів накладені обмеження бюджетного типу
 (33) (33)
де  - загальна кількість ресурсів, виділених для транспортних засобів m-го типу (наприклад, розмір бюджету часу), - загальна кількість ресурсів, виділених для транспортних засобів m-го типу (наприклад, розмір бюджету часу),  - кількість ресурсів, що затрачаються на переміщення одиниці потоку по дузі (i, j). Всі перемінні задачі невід’ємні: - кількість ресурсів, що затрачаються на переміщення одиниці потоку по дузі (i, j). Всі перемінні задачі невід’ємні:
 (34) (34)
Потрібно визначити оптимальні кількості навантажених і порожніх транспортних засобів кожного типу, що переміщаються по дугах транспортних мереж різноманітних видів транспорту, кількості транспортних засобів, що спрямовуються в резерв, арендованих, починаючих і різноманітних вузлах закінчують, що роботу в, мережі, а також оптимальні обсяги відправлення, доставки, збереження, перевалювання і перевезення вантажів, при яких забезпечується одержання максимального прибутку (без урахуванням постійних складових):
 (35) (35)
де  - питомі прибутки від перевезення одиниці вантажів; - питомі прибутки від перевезення одиниці вантажів;  - питомі витрати на перевалювання, навантаження-розвантаження і збереження вантажів; - питомі витрати на перевалювання, навантаження-розвантаження і збереження вантажів;  - питомі прибутки від перевезення надпланових вантажів; - питомі прибутки від перевезення надпланових вантажів;  - питомі витрати на збільшення ємності складів; - питомі витрати на збільшення ємності складів;  - питомі витрати на переміщення й оренду транспортних засобів, - питомі витрати на переміщення й оренду транспортних засобів,  - питомі утрати від простою транспортних засобів. - питомі утрати від простою транспортних засобів.
Двохрівнева система моделей будувалася таким чином, щоб не тільки забезпечити можливість рішення вихідної задачі методом декомпозиції, але і щоб модель кожного рівня не носила штучний характер, а мала чітку змістовну інтерпретацію і при необхідності могла використовуватися незалежно.
Роздивимося тепер більш докладно формулювання і методи рішення задач кожного рівня [18].
Задачею, що вирішується на верхньому рівні системи, є визначення оптимальних агрегованих вантажопотоків у єдиній транспортній мережі з урахуванням її характеристик і потреб народного господарства в перевезеннях вантажів, розподіл вантажопотоків між видами транспорту, планування змішаних перевезень за участю декількох видів транспорту і вибір оптимальних пунктів перевалювання вантажів з одного виду транспорту на інший.
Дана задача формулюється в такий спосіб.
Задано графа  ,що подає агреговану єдину транспортну мережу країни, що складається з агрегованих транспортних мереж ,що подає агреговану єдину транспортну мережу країни, що складається з агрегованих транспортних мереж  окремих видів транспорту і містить вершини окремих видів транспорту і містить вершини  пункти відправлення-призначення, що подають, вантажів і пункти їхній перевалювання. Для кожного пункту пункти відправлення-призначення, що подають, вантажів і пункти їхній перевалювання. Для кожного пункту  задані обсяги вантажів n-го роду задані обсяги вантажів n-го роду  котрі потрібно відправити з нього або доставити у відповідний період часу, прибутки котрі потрібно відправити з нього або доставити у відповідний період часу, прибутки  , витрати , витрати  при використані M-м видом транспорту одиниці ємності складів у пункті i прибуток при використані M-м видом транспорту одиниці ємності складів у пункті i прибуток  від вивозу одиниці вантажів, що були на складах у пункті i до початку планового періоду. Відомі також пропускні спроможності від вивозу одиниці вантажів, що були на складах у пункті i до початку планового періоду. Відомі також пропускні спроможності  ланок транспортної мережі, пропускні спроможності ланок транспортної мережі, пропускні спроможності  пунктів перевалювання і витрати пунктів перевалювання і витрати  на перевалювання одиниці вантажу з одного виду транспорту на інший. З деяких пунктів можливий вивіз надпланових вантажів (наприклад, на морському транспорті такими вантажами є вантажі іноземних фрахтувальників). на перевалювання одиниці вантажу з одного виду транспорту на інший. З деяких пунктів можливий вивіз надпланових вантажів (наприклад, на морському транспорті такими вантажами є вантажі іноземних фрахтувальників).
Потрібно знайти розмір агрегованого потоку вантажів по дугах графа { }, обсяги відправлення і доставки вантажів { }, обсяги відправлення і доставки вантажів { }, { }, { }, обсяги перевалювання вантажів із М-го виду транспорту на L-й і навпаки в кожному пункті перевалювання { }, обсяги перевалювання вантажів із М-го виду транспорту на L-й і навпаки в кожному пункті перевалювання { }, { }, { },обсяги відправлення надпланових вантажів { },обсяги відправлення надпланових вантажів { }, кількості вантажів, що спрямовуються кожним видом транспорту на склади або вивезених із складів { }, кількості вантажів, що спрямовуються кожним видом транспорту на склади або вивезених із складів { }, { }, { }, і визначити частки { }, і визначити частки { } і { } і { } початкової кількості вантажів на складах у кожному пункті і загальній ємності складів, що виділяються в розпорядження кожного виду транспорту, при яких досягається максимум економічного ефекту } початкової кількості вантажів на складах у кожному пункті і загальній ємності складів, що виділяються в розпорядження кожного виду транспорту, при яких досягається максимум економічного ефекту
 При цьому повинні виконуватися умови зберігання агрегованого потоку вантажів n-го роду ( ) при проходженні через вершини графа в кожний період часу t( ) при проходженні через вершини графа в кожний період часу t( ) )
 (37) (37)
 (38) (38)
 (39) (39)
де
  (40) (40)
Обмеження (37) відповідає пунктам відправлення і доставки вантажів, що одночасно є пунктами перевалювання, обмеження (38) - пунктам, що є тільки пунктами відправлення і доставки, а обмеження (39) - іншим пунктам. Крім того, виконуються обмеження на максимально можливі обсяги відправлення і доставки вантажів
 (41) (41)
обмеження на максимально можливі обсяги перевалювання вантажів з одного виду транспорту на інший у кожному пункті перевалювання
 (42) (42)
обмеження на пропускну спроможність ланки агрегованої транспортної мережі:
 (43) (43)
і обмеження на використання ємності складів у вузлах агрегованої транспортної мережі різноманітними видами транспорту
 (44) (44)
де
 (45) (45)
Кількість вантажів кожного роду, що зберігаються на складах у кожний момент часу, невід’ємна:
 (46) (46)
де початкової кількості вантажів п-го роду, що може бути вивезена M-м видом транспорту,
 (47) (47)
Крім того, повинні виконуватися умови невід’ємності:
 (48) (48)
Сформульована задача є задачею лінійного програмування з мережною підструктурою. В.зв'язку з тим що матриця її обмежень має квазіблочний вид, для рішення задачі може бути використаний метод декомпозиції.
Шляхом розкладання обмежень (41), (42), (45), (47) на окремі обмеження для кожного підграфа вихідна задача (36) - (48) зводиться до двохрівневої системи більш простих задач. Ця система складається з розв'язуваних на другому рівні задач розподілу обсягів відправлення і доставки вантажів , пропускних спроможностей пунктів перевалювання , ємностей складів і початкової кількості вантажів у них між різноманітними видами транспорту:
і розв'язуваних на першому рівні задач визначення агрегованых потоків вантажів по окремим підграфами  , що відповідають різноманітним видам транспорту М: , що відповідають різноманітним видам транспорту М:
Крім того, повинні виконуватися обмеження (37)-(39), (43), (44), (46), (48).
Застосування методу декомпозиції дозволяє істотно | зменшити розрахункові труднощі. Задача другого рівня 1 мають просту структуру, і їхні рішення можуть бути виписані 3 у явному виді, а задача першого рівня вирішуються на окремих підграфах і можуть бути зведені до задач про однопродуктовий потік мінімальної вартості, для яких є ефективні спеціальні алгоритми [14-26] (як зазначено в [13], за допомогою даних алгоритмів задачі вирішуються приблизно в 50-100 разів швидше, чим за допомогою звичайних методів лінійного програмування. Так, наприклад, задача з 1200 вершинами і 4000 дуг була вирішена усього за 20 с).
Узгодження рішень задач другого і першого рівнів здійснюється відповідно до ітеративного алгоритму: на кожній ітерації в моделях першого рівня коректуються праві частини обмежень на обсяги відправлення, доставки і перевалювання вантажів, що виділяються частка початкової кількості вантажів на складах і пропускних засіб ностей ланки транспортної мережі, а в моделях другого рівня - значення коефіцієнтів цільової функції. Ітеративний процес узгодження рішень задач різних рівнів продовжується доти, поки не буде отримане оптимальне рішення вихідної задачі.
Як вже визначалося, задача нижнього рівня розпадається на  задач, що відповідають окремим видам транспорту. Для кожного виду транспорту М вирішується така задача. Потрібно максимізувати економічний ефект від перевезення вантажів М-м видом транспорту задач, що відповідають окремим видам транспорту. Для кожного виду транспорту М вирішується така задача. Потрібно максимізувати економічний ефект від перевезення вантажів М-м видом транспорту
 (49) (49)
при виконанні обмежень
 (50) (50)
 (51) (51)
 (52) (52)
 (53) (53)
де  відображаючих умови зберігання потоку вантажів кожного роду. відображаючих умови зберігання потоку вантажів кожного роду.
Крім того, повинні виконуватися обмеження на максимально можливі обсяги відправлення і доставки вантажів
 (54) (54)
обмеження на кількість вантажів, що можуть бути спрямовані на склад:
 (55) (55)
і узяті зі складів:
 (56) (56)
Розглянемо математичну модель і метод рішення.
У тому випадку, коли планування транспортних потоків різних видів відбувається незалежно, наприклад, на різних етапах \упорядкування планів, при перебуванні оптимальныхпотоков транстранспортных засобів, необхідних для освоєння заданих потоків.; вантажів, у багатьох випадках (особливо при рішенні задач те що кут або перспективного планування), можна вважати, що маршрути потоків транспортних засобів і потоків вантажів цілком збігаються, таким чином, для визначення потоків транспортних засобів достатньо знайти лише кількість транспортних засобів кожного типу, що закріплюються за кожним вантажопотоком.
Математичні моделі, запропоновані для рішення таких задач, називаних також задачами розставляння транспортних засобів, можна розділити на два типи: моделі, що дозволяють.одночасно знаходити як оптимальне закріплення транспортних засобів різного типу за різноманітними напрямками вантажопотоків, так і схеми (маршрути) їхній переміщення, і моделі оптимального розподілу типів транспортних засобів по напрямках перевезень.
Одна з перших формулювань задачі розставляння транспортних засобів з одночасною побудовою схем їхній переміщення запропонована в [44]. У даній роботі транспортна мережа містить тільки пункти відправлення і пункти призначення вантажів одного роду і потрібно визначити оптимальну кількість порожніх у навантажених транспортних засобів кожного типу, що переміщаються по ланках транспортної мережі, при якому забезпечуються мінімальні сумарні витрати бюджету часу транспортних засобів. Задано обмеження на розмір бюджету часу кожного типу транспортних засобів на необхідні обсяги перевезень із кожного пункту відправлення в кожний пункт призначення, а також обмеження, що відбивають умови зберігання потоку транспортних засобів при проходженні через вузли транспортної мережі.
У [15] розглянута подібна задача, у якій враховується можливість оренди транспортних засобів і потрібно забезпечити мінімум суми витрат на оренду й експлуатаційні витрати, пропорційних витратам бюджету часу. Для зменшення обчислювальних труднощів, обумовлених великою розмірністю даної задачі, розроблений метод, заснований на методі генерації стовпчиків. На кожній ітерації відшукують замкнутий маршрут кожного окремого транспортного засобу, що забезпечує мінімальні витрати. Ця задача є задачею про циркуляцію мінімальної вартості і вирішується за допомогою алгоритму дефекту [4]. Потім на основі отриманих рішень підзадач для окремих транспортних засобів вирішується задача побудови нового базису вихідної задачі, для чого використовують тільки ті зі знайдених маршрутів, що є більш вигідними в порівнянні з існуючими.
У [17] сформульована задача планування перевезень декількох родів вантажів у різноманітні періоди часу. Частина вантажів повинна бути перевезена обов'язково, перевезення інших вантажів є факультативної. Поряд з обмеженнями, розглянутими в [14, 15], задані обмеження на припустиме скупчення транспортних засобів в однім регіоні і на мінімально припустимий обсяг перевезення вантажів між пунктами відправлення та пунктами призначення. Враховується також кількість транспортних засобів, що повинні вводитися в експлуатацію і виводитися з її в окремих вузлах транспортної мережі.
Оскільки задача даного типу є задачами цілочисельного лінійного програмування, їхнє рішення пов'язане із визначеними обчислювальнимитруднощами, обумовленими високою розмірністю практичних задач і необхідністю використовувати додаткові прийоми для усунення можливої незв`язнотсти одержуваних маршрутів прямування транспортнихзасобів.
Найбільше доцільною областю застосування моделей даного типу є задачі оперативного і середньострокового планування, у яких вимога недрібності потоків транспортнихзасобів є істотним.
Моделі другого типу більш придатні для задач поточного і перспективного планування, у яких інформація про початкові позиції транспортних засобів, бюджетах їхнього часу а необхідних обсягів перевезення вантажів є наближеної, і тому нема рації відшукувати оптимальне рішення з точностью-до послідовності виконання окремих рейсів окремими транспортними засобами. У більшості випадків достатньо визначити лише оптимальні витрати бюджету часу кожного ' типу транспортних засобів на освоєння кожного вантажопотоку або, що те ж саме, обсяги перевезень вантажів транспортними засобами різноманітних типів.
У [19] запропонований двохетапний метод рішення задачі розставляння транспортних засобів.
На першому етапі потоки вантажів різного роду агрегуються в потік деякого умовного, вантажу і для кожного пункту навантаження-розвантаження визначають потребу в тоннажі і кількість тоннажу, не забезпеченого вантажем. Потім вирішується задача призначення вільного тоннажу на перевезення вантажів до критерію мінімуму баластових переходів. На основі отриманих маршрутів переміщення порожніх транспортних засобів і заданих шляхів переміщення потоків вантажів будуються схеми прямування транспортних засобів.
На другому етапі вирішується задача пошуку оптимального розподілу транспортних засобів кожного типу по отриманих схемах прямування, що забезпечує максимум прибули при виконанні обмежень на бюджет часу транспортних засобів кожного типу й обсяг перевезень вантажу по кожній схемі.
У [10] розглянута задача розподілу транспортних засобів по всіх можливих схемах прямування і динамічної задачі переміщення транспортних засобів з одних схем на інші при зміні умов експлуатації в різні періоди часу.
У [8] вирішена задача розподілу транспортних засобів різного типу по різних напрямках вантажопотоків з урахуванням можливості побіжних перевезень вантажів, обмежень на кількість транспортних засобів і бюджет їхнього експлуатаційного часу.
Основну трудність при рішенні практичних задач розподілу вантажопотоків між різноманітними типами транспортних засобів складає їхня висока розмірність, що вимагає відмовлятися від урахування цілого ряду важливих чинників,, вирішувати задачу для частини вантажопотоків і транспортних засобів, не враховувати тимчасові чинники.
У зв`язку із цим у [15] запропонований декомпозиційний метод для рішення задач, що мають велику розмірність.
Розроблена математична модель дозволяє визначити оптимальний розподіл обсягів перевезень вантажів у кожний період часу між різноманітними типами власних і орендованих транспортних засобів, обсяги перевезень вантажів транспортними засобами, що здаються в оренду, кількість вантажів, перевезення яких переноситься на інші періоди часу, та розподіл зовнішніх витрат бюджету часу (наприклад, на ремонт) між різноманітними періодами часу.
Дана модель є окремим випадком розглянутої вище моделі оптимізації транспортних потоків на транспортній мережі одного виду транспорту, істотно спрощеної і модифікованої на основі аналізу ряду реальних задач поточного і перспективного планування перевезень. Передбачається, що на початку планового періоду транспортні засоби знаходяться в пунктах відправлення вантажів, перевезення вантажів від пункту відправлення в пункт призначення здійснюються без перевалювання в проміжних пунктах, а пропускна спроможність ланки транспортної мережі, транспортних вузлів і складів не обмежений. Завдяки цьому виявилося можливим, по-перше, висловити розмір потоку вантажів по дугах графа через розмір потоку навантажених транспортних засобів, а по-друге, визначати розмір потоку транспортних засобів не для окремих дуг графа, а в цілому для шляху від джерела до стоку (називаного «напрямком перевезень»).
Перед тим, як переходити до формулювання моделі, уведемо деякі позначення:
 - обсяг перевезень вантажів n-го роду по l-му напрямку в період - обсяг перевезень вантажів n-го роду по l-му напрямку в період  транспортними засобами m-го типу, що належать підприємству (усі типи транспортних засобів т діляться на групи транспортними засобами m-го типу, що належать підприємству (усі типи транспортних засобів т діляться на групи  ); );
 - обсяги перевезень транспортними засобами m-го типу, орендованими в іншого підприємства р для виконання окремих перевезень і на весь період відповідно; - обсяги перевезень транспортними засобами m-го типу, орендованими в іншого підприємства р для виконання окремих перевезень і на весь період відповідно;
 - обсяг вантажів n-го роду, що транспортне підприємство повинно перевезти по напрямку l у заданий період, часу [ - обсяг вантажів n-го роду, що транспортне підприємство повинно перевезти по напрямку l у заданий період, часу [ ]; ];
 - залишок вантажів n-го роду на l-й напрямку в період - залишок вантажів n-го роду на l-й напрямку в період  ; ;
 - обсяг перевезень транспортними засобами m-го типу, зданими в оренду іншому підприємству р для виконання окремих перевезень; - обсяг перевезень транспортними засобами m-го типу, зданими в оренду іншому підприємству р для виконання окремих перевезень;
 - витрати бюджету часу транспортних засобів, наданих у ореду іншому підприємству р на період ; - витрати бюджету часу транспортних засобів, наданих у ореду іншому підприємству р на період ;
 - позаексплуатаційні витрати бюджету часу (наприклад, на плановий ремонт), розподіл яких по період дам часу { - позаексплуатаційні витрати бюджету часу (наприклад, на плановий ремонт), розподіл яких по період дам часу { } можна регулювати; } можна регулювати;
 - трудомісткість перевезення вантажу n-го роду по l-му напрямку в період транспортними засобами m-го типу; - трудомісткість перевезення вантажу n-го роду по l-му напрямку в період транспортними засобами m-го типу;
 - прибутки від перевезення одиниці вантажу; - прибутки від перевезення одиниці вантажу;
 - експлуатаційні витрати на перевезення единиці вантажу; - експлуатаційні витрати на перевезення единиці вантажу;
 - арендна платня за перевезення лдиниці вантажу та за одинцю бютжетного часу арендованого транспортного засобу; - арендна платня за перевезення лдиниці вантажу та за одинцю бютжетного часу арендованого транспортного засобу;
 - експлуатаційні витрати на одиницю бюджету времени транспортних засобів, що здаються в оренду другому пред прийняттю на перпод ; - експлуатаційні витрати на одиницю бюджету времени транспортних засобів, що здаються в оренду другому пред прийняттю на перпод ;
 - втрати від невивозу вантажу n-го роду на l-ном напрямку в період - втрати від невивозу вантажу n-го роду на l-ном напрямку в період  (щодо обов’язкових перевезень (щодо обов’язкових перевезень  ). ).
Математична модель планування об’ємів перевезень має наступний вигляд.
Потрібно максимізувати отримуємий транспортним підприємством прибуток, який складається з прибутків від перевезення вантажів як власними, так й арендованими транспортними засобами та прибутків від надання транспортних засобів у аренду за різністю експлуатаційних витрат, витрат на аренду та витрат, пов’язаних з затримкою вивозу вантажів:
 (57) (57)
При цьому повинні бути виконані такі обмеження.
Сума обсягу вантажів, перевезених як власними, так і орендованими транспортними засобами, і обсягу вантажів, перевезення яких переноситься на інші періоди, повинна бути дорівнює загальній кількості вантажів:
 (58) (58)
 (59) (59)
Витрати бюджету часу транспортних з асобів, що укладаються з витрат на перевезення вантажів, витрат під час оренди і позаесплуатаційних витрат, не повинні перевищувати загального календарного бюджету часу транспортних засобів даного типу в даний період:
 (60) (60)
де
 (61) (61)
Витрати на аренду не повині перевищувати виділену для цього суму
 (62) (62)
Обсяги надання транспортних засобів в оренду не повинні перевищувати відповідних потреб:
 (63) (63)
 (64) (64)
Витрати бютжету часу арендованих транспортних засобів не можуть більше максимально м ожливих:
 (65) (65)
Витрати бюджету часу, обсяги перевезень і обсяги вантажів невід’:
 (66) (66)
Особливістю даної моделі в порівнянні з запропонованими: раніше є те, що в ній істотно враховується сезонність вантажопотоків і обмеження на використання транспортних засобів на окремих напрямках перевезень у різний час року, припускається перенос перевезення деяких вантажів на інший період часу,' враховуються утрати від невчасного вивозу вантажів, обов'язковість деяких із перевезень і можливість оренди транспортних засобів.
У зв'язку з тим що для значних транспортних організацій сформульована задача має надзвичайно велику розмірність, було запропоновано використовувати для її рішення декомпозиційний метод.
У результаті декомпозиції шляхом розкладання обмежень (58), (59), (62), (63) по групах типів транспортних засобів , задача (57)-(66) зводиться до двохрівневому комплексу задач меншої розмірності.
На другому (верхньому) рівні вирішуються задачі розподілу обсягів вантажів, обсягів решти транспортних засобів в оренду і коштів між групами транспортних засобів:

де коефіцієнти цільових функцій  характеризуютьдоцільність збільшення для j-й групи транспортних засобів що виділяється обсягу решти транспортних засобів в аренду, кількості коштів і обсягу вантажів відповідно. характеризуютьдоцільність збільшення для j-й групи транспортних засобів що виділяється обсягу решти транспортних засобів в аренду, кількості коштів і обсягу вантажів відповідно.
На першому (нижньому) рівні для кожної групи j (j =1, J) визначаються обсяги перевезень власними й арендованими транспортними засобами, обсяги вантажів, перевезення котрих переноситься на інші планові періоди, а також обсяги аренди і решти в оренду транспортних засобів, що забезпечують отримання максимального економічного ефекту
при виконанні обмежень (59)-(61), (64), (65), специфічних для даної групи транспортних засобів, а також заданих другим рівнем обмежень на загальні обсяги перевезень вантажів власними, арендованими і що здаються в аренду транспортними засобами
і на загальні витрати, пов'язані з орендою транспортних засобів,

та умовневід’ємності змінних

Для узгодження рішень отриманих підзадач другого і першого рівня з метою досягнення оптимального рішення вихідної задачі застосовується ітеративний алгоритм.
Розроблені однорівнева і дворівнева моделі дозволяють оптимізувати розподіл транспортних засобів по напрямках перевезень з урахуванням сезонної нерівномірності вантажопотоків. Ефективне використання ресурсів транспорту досягається завдяки раціональному розподілу перевезень між транспортними засобами різного типу, висновку транспортних засобів з експлуатації в період Мінімального навантаження, оренді транспортних засобів в інших підприємств у період максимального навантаження і решті в оренду власних транспортних засобів у період мінімальної.
Запропоновані моделі можуть бути використані для рішення цілого ряду практичних задач поточного і перспективного планування, у тому числі для планування роботи транспортного підприємства, розподіли планових завдань на перевезення вантажів між різноманітними транспортними підприємствами, оптимізації структури парку транспортних засобів, визначення оптимальної кількості що закуповуються (мурованих, арендованих) і що списуються в зв'язку з моральним зносом транспортних засобів кожного типу і т.п.
Для рішення практичних задач розподілу потоків вантажів між різноманітними типами транспортних засобів розроблені програми: GRASS1, що дозволяє вирішити задачу (57)-(66) звичайним алгоритмом лінійного програмування, і GRASS2, що реалізує декомпозиционный алгоритм рішення цієї задачі. Програми побудовані по модульному принципі, мають оверлейную структуру і містять такі модулі:
GRAS1, GRAS2 - модулі, що управляють викликом підпрограм при рішенні задача (57)-(66) та відповідно задач другого і першого рівнів у дворівневоймоделі;
INPUT1, INPUT2 - підпрограми для запровадження вихідних даних і формування на їхній основі матриць умов задачі лінійного програмування;
LINK1, LINK2- підпрограми для перетворення розширеної матриці умов, задача лінійного програмування (яка містить строчку коефіцієнтів критерію і стовпчик правих частин обмежень) у компактну форму (без нульових елементів);
SIMPL1, SIMPL2 - підпрограми для рзшзния задач лінійного програмування з компактною формою матриці обмежень;
SOLVE1, SOLVE2- підпрограми, що реалізують звичайний Ц декомпозиционный алгоритми рішення задачі з використанням одноуровневой і двухуровневой моделей відповідно;
Всі задачі оптимізації транспортних потоків можна розділити на два класи: задача, у яких транспортні потоки рахуються незалежними, і задача, у яких враховується взаємозв'язок транспортних потоків різноманітних видів.
Перший клас задач вивчений достатньо докладно, і йому присвячене значне спало робіт, чого не можна сказати про другий клас, порівняно мало досліджуваному.
Відповідно до яскраво вираженого розходження в технології перевезень і задачах керування ними всі задачі оптимізації незалежних потоків можна розділити на задачі оптимізації транспортних потоків, що відповідають масовим і мілкоштучними перевезенням вантажів.
Найбільше добре вивченими і широко застосовуваними є задачі визначення максимального транспортного потоку однієї групи (потоку вантажів, транспортних засобів і т.п.), що протікає від джерела s у стік t мережі. При цьому кожній дузі (i, j) мережі G (K, А) приписана деяка пропускна спроможність, що визначає найбільше значення транспортного потоку, що може протікати по даній дузі.
Якщо є декілька пунктів зародження п поглинання транспортних потоків (джерела п стоків), причому між різноманітними джерелами і стоками протікають різнорідні транспортні потоки і сума усіх видів потоків через відповідну дугу обмежена її пропускною спроможністю, така задача максимизації сумарного потоку між джерелами і стоками називається задачею про багатопродуктовий потік.
У випадку, коли на додаток до пропускних спроможностей задані також вартості переміщення одиниці транспортного потоку по кожній дузі мережі, виникає задача перебування транспортного потоку, вартість переміщення якого мінімальна.
Одним з окремих випадків задач оптимізації потоків, розв'язуваних при керуванні масовими перевозками, є визначення найкоротших шляхів на транспортній мережі. Ця задача необхідна для упорядкування матриць кореспонденції: таблиць міжпортових кореспонденції - на морському транспорті і шахів-маток кореспонденції - на залізничному транспорті.
Якщо відмовитися від припущення, що в процесі переміщення по дузі розмір транспортного потоку залишається незмінної, тобто якщо на виході з дуги розмір потоку дорівнює розміру потоку на; її вході, помноженої на деяке ненегатовние число, те задача про потік між я и г стає задачею про потоки з посиленнями або втратами.
В усіх розглянутих вище випадках неявно припускалися, що транспортні потоки, що існують у мережі, є статистичними, тобто не враховується такий важливий показник, як час переміщення потоку по дузі. Припустимо, що кожна дуга характеризуется додатково і часом проходження по ній одиниці потоку. При цьому можливими потоками рахуються тільки, такі, у котрих кожна одиниця потоку проходить із джерела в стік за час, що не перевищує задане. Задача про динамічний потік складається в тому, щоб визначити оптимальний транспортний потік із джерела в стік у зазначений час за умови, по в кожній вершині мережі G (K, А) потік може відправлятися негайно або затримуватися. У такий важливої в практичному відношені постановці задачі можуть бути облічені також витрати на перевалювання, обмеження на ємність складів, пропускні здатності пунктів перевалювання, витрати на збереження і т.д. Задача динамічному потоку грає істотну роль у постановці та рішенні великого класу задач упорядкування графіків і роскладу роботи транспортних засобів.
У розглянутих вище задачах передбачається, що потік вантажів від відправника до одержувача значно вище вантаже під’ємності транспортного засобу (масові перевезення) і його можна виміряти кількістю транспортних засобів, необхідних для його освоєння. При цьому непарністю потоку вантажомісткості:транспортних засобів припустимо зневажати, тобто можна невраховувати цілочисльність потоку.
Протилежний випадок має місце при плануванні дрібних перевезень, коли вантажомісткість використовуваних транспортних засобів значно вище ваги партії. Основними задачами оптимізації дрібних перевезень є- задача маршрутизації й упорядкування графіків прямування транспортних засобів.
У задачах маршрутизації при заданих множинах пунктів гроизводства, споживання, розміщення рухливого складу,
У якості таких критеріїв використовуються найменше число транспортних засобів, найкоротший час виконання перевезень, мінімальна сумарна відстань або вартість виконання перевезень і т.д.
У випадку, що коли вирішує чинником у плануванні роботи транспортного підприємства є урахування динаміки транспортного процесу, виникають задачі упорядкування графіків прямування транспортних засобів. У графіках визначаються маршрути прямування транспортних засобів, що задовольняють заданим моментам їхній прибуття або відправлення в пункти транспортної мережі. Будь-яке транспортне підприємство, плануючи свою роботу на тривалий період T, як правило, намагається організувати роботу частини транспортних засобів із якоюсь періодичністю. Графіки з повторюваною структурою на інтервалах часу [(k - 1)T; kT], k = 1, 2,... будемо називати розкладом роботи транспортного засобу. Період Т може бути, наприклад, дорівнює 24 ч для роботи міського і приміського транспорту, тижню чи місяцю для роботи морських і річкових судів.
Таким чином, задача упорядкування графіків прямування транспортних засобів є подальшим ускладненням задач маршрутизації.
Задача маршрутизації й упорядкування графіків і розкладів прямування транспортних засобів є надзвичайно складними з обчислювальної точки зору. Відповідно до теорії обчислювальної складності рішення задач дискретної оптимізації [2] ефективно розв'язуваної називається задача, для рішення якої існує алгоритм із числом операцій, статечним уявою залежних від розмірності вихідних даних. Задача називається важковирішальною, або NP-складною, якщо для будь-якого відомого алгоритму її точного рішення можна побудувати приклад, для якого число операцій алгоритму буде виражатися експоненціальною функцією від розмірності вихідних даних задачі.
Показано, що задача оптимізації потоку транспортних засобів, що чинять дрібні перевезення, не мають ефективних точних алгоритмів рішення [3]. Застосування точних алгоритмів, заснованих на методах математичного програмування, для одержання чисельного рішення задач реальної розмірності надається практично неспроможним. Ці методи дозволяють вирішувати задача незначних розмірностей і мають головною уявою теоретичне значення. Тому для рішення задач маршрутизації й упорядкування графіків використовуються наближені й евристичні алгоритми.
Другим класом задач оптимізації транспортних потоків є задачі про взаємозалежні транспортні потоки, у котрих додані умови, що відбивають залежність розміру транспортного потоку одного виду, що протікає по якийсь дузі мережі, від розміру транспортних потоків інших видів, що протікають по цей же дузі. (Наприклад, залежність потоку вантажів від потоку транспортних засобів, що перевозять ці вантажі. ) Крім того, у цих задачах може враховуватися можливість перетворення транспортних потоків одного виду в інші. Така ситуація має місце, зокрема, у транспортних вузлах, де відбувається перевалювання вантажів з одного виду транспорту на другий.
Ці моделі більш точно описують реальний транспортний процес. Проте алгоритми рішення задач про взаємозалежні потоки значно складніше алгоритмів для задач про незалежні потоки і в даний час їхнє дослідження тільки починається.
На практику частіше інших зустрічаються задачі, у яких потрібно оптимізувати два види взаємозалежних транспортних потоків: потік вантажів різного роду і потік різноманітних видів транспортних засобів.
Задача оптимізації вантажопотоків і потоків транспортних засобів можуть мати досить високу розмірність, особливо якщо мова йде про оптимальний розподіл вантажопотоків між усіма видами транспорту. У цьому випадку доцільно використовувати не одну математичну модель, а ієрархічну систему взаємодіючих моделей, у якій модель верхнього рівня описує весь транспортний процес із використанням агрегованих показників, а моделі нижнього рівня дають детальний опис окремих складового цього процесу. Рішення, отримане за допомогою агрегированої моделі, використовують для узгодження рішень детальних задач, а рішення детальних задач - для уточнення агрегованої моделі.
У ряді окремих випадків задачі про взаємозалежні потоки вдасться зводити до задач про незалежні потоки, у які додані додаткові умови, що відбивають у непрямій формі обмеження, накладені на потік іншого виду. Прикладом такої задачі може служити задача розподілу вантажопотоків між різноманітними типами транспортних засобів з урахуванням обмеження на обсяг робот, що можуть виконати транспортні засоби.
3.1 Структура моделі
У якості структурної моделі транспортної системи підприємства можна запропонувати схему, що складається з трьох рівнів. Необхідно відзначити, що з метою деякого спрощення задачі розглядається транспортна система транспортування матеріальних засобів. Питання транспортування енергії, енергоносіїв, і ін. аналогічних носіїв у даній роботі ми не розглядаємо.
На першому верхньому рівні знаходяться транспортні зв'язки підприємства із суміжниками і покупцями товару їм що випускається. На другому рівні міжцехові транспортні зв'язки. На третьому знаходяться внутрішньоцехові зв'язки. Крім того, рівні будуть пов'язані між собою окремими вертикальними зв'язками. Цю структурну схему можна уявити на рис.3.1.
При цьому на верхньому рівні, рівень А, рис.3.1, йде обмін по закупівлі і постачанню комплектуючих і постачанню продукції, що буде здійснюватися відповідно по трем потоках а1,а2.а3, далі другий рівень, рівень підприємства в целом- У, характеризується міжцеховими потоками: в1,в2,в3,...і в цьому випадку при наявності окремих підрозділів або цехів і нарешті на третьому рівні С, що веде роль грають внутрицеховые потоки деталей, заготівель, стружки і т.д.,тобто, це потоки: c1,с2,... сm.
При цьому система може описуватися такими локальними параметрами: масою що переміщаються або що транспортуються об'єктів, довжиною шляху транспортування, вартістю транспортування, часом транспортування.
Для опису системи в цілому введемо залишкову функцію вантажопотоків -  на обраному рівні як на обраному рівні як
 , (67) , (67)
де
 - вхідний вантажопотік; - вхідний вантажопотік;
 - вихідний вантажопотік. - вихідний вантажопотік.
При цьому можна вважати, відповідно до робіт [1,2], що будуть справедливі такі співвідношення
 , (68) , (68)
де
 - щільність вантажопотоку; - щільність вантажопотоку;
 - швидкість переміщення вантажу у вантажопотоку. - швидкість переміщення вантажу у вантажопотоку.
Вираження (68) можна записати в іншому виді
 . .
Або для одномірного випадку
 . .
У одномірному випадку ми можемо одержати значення швидкості як
 , (69) , (69)
де під розуміється компонента швидкості в цьому ж напрямку.
Крім того, необхідно прийняти таке допущення, що буде справедливо співвідношення для цінового потенціалу  : :
 , (70) , (70)
де
 -коефіцієнт пропорційності; -коефіцієнт пропорційності;
Це співвідношення говорить про те, що вантажопотік потенційний.
Причому значення може являти собою як ціновий потенціал, так потенціал організаційного типу.
У двумерном випадку можна записати, що справедливо вираження
 . .
При цьому, ограничившись одним виміром одержимо, що

Одержимо, що справедливо вираження:
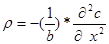 , (71) , (71)
де значення  може бути заздалегідь задане у виді функції або вираження. може бути заздалегідь задане у виді функції або вираження.

Рис3.2.- Залежність щільності  від координати за умови, що з=f(x4) від координати за умови, що з=f(x4)
На Рис. 3.2. призводимо графік, що ілюструє цю залежність
У свою чергу графік зміна швидкості вантажопотоку, відповідно до вираження прийме вид, див. графік, рис.3.3.

Рис.3.3.- Графік, що фіксує зміну швидкості вантажопотоку в залежності від координати  або шляху при заданому законі зміни в залежності від часу або шляху при заданому законі зміни в залежності від часу
Функція швидкості асимптотична і швидко досягає свого граничного значення, рис.3.3.
Необхідно відзначити, що в реальних умовах швидкість переміщення будь-якого вантажу буде обмежена.
Проте, рішення рівняння (70), називане звичайно диференціальним рівнянням фізики [2], викликає достатньо багато трудностей, можливість рішення рівнянь подібного типу пов'язано з можливістю поділу перемінних у спеціально обраних системах координат. У принципі рішення можна уявити у виді твори до, прикладу у виді:
 . .
У цьому випадку підстановка цього рішення в основне рівняння і проведення спеціальних процедур дозволяє одержати рішення, що влаштовує усіх.
Більш реально для пошуку рішення обмежитися одномірним випадком або застосувати, можливо, диференціювання по шляху.
Інший варіант рішення складається в тому, щоб задаватися простим вираженням, приміром, для і потім знаходити рішення для з рівняння (68).
Проте, підходом до рішення може бути таке, із рівняння (68) знаходиться значення , після чого це вираження подставляется в рівняння, що після ряду перетворень дозволяє одержати значення швидкості реального вантажопотоку.
Крім того, відомо, що щільність вантажопотоку можна знайти по вираженню
 , ,
де  - фазова щільність; - фазова щільність;
 - імпульс вантажу в потоку. - імпульс вантажу в потоку.
Імпульс вантажу у вантажопотоку являє собою не що інше як
 , ,
де, у свою чергу  - маса вантажу. - маса вантажу.
 - швидкість вантажу. - швидкість вантажу.
А масу вантажу, що проходить по вантажопотоку, можна визначити по такому вираженню
 . .
У цьому випадку, у загальному виді, ми маємо весь комплект рівнянь для визначення маси вантажопотоку і його швидкості.
Слід зазначити, що для вантажопотоків на рівні С будуть справедливі такі положення, описані на прикладі виробничої ділянки.
Виробництво порожнистих напівфабрикатів здійснюється на вузько спеціалізованому устаткуванні. Особливість виробництва- спеціалізація, близькість процесів по деяким свої характеристикам не до заготівельних, а до що механобробляють. Проте найбільший інтерес виникає у випадку проектування ділянок ротаційного обкатування і найбільше близьким піт істоті технологічним процесам. У цьому випадку, у випадку серійного виробництва, можна запропонувати декілька варіантів розташування устаткування: ділянка з послідовним розташуванням верстатів і спірального розташування на двох рівнях, а також кільцевим. Схематически варіанти розташування устаткування подані на рис.3.4.
а- послідовна схема;б- послідовна багаторівнева схема.
Рис.3.4.- Схеми розташування устаткування на ділянках ротаційного обкатування
Інший варіант розташування устаткування, аналогічний роторному або кільцевому принципу розташування, мал.3.5.
Рис 3.5.- Роторний або кільцевий принцип розміщення устаткування.Кожній із схем розташування устаткування властиві ті або інші хиби, схема мал.3.6 а, у випадку недовантаження ділянки, дозволяє резервувати устаткування для планово-попереджувальних ремонтів. У свою чергу схема, рис3.2., кільцевого типу передбачає рівномірне завантаження устаткування з необхідністю вимикання однієї з одиниць перекиданням виробничого навантаження на що залишилися.
Рис 3.6- Графи, що відповідають схемам компонування ділянки ротаційного обкатування
Схема рис.3.6, б, передбачає регулювання навантаження на устаткування і вона використовується з відносної невеличкою "багатоповерховістю" при проектуванні устаткування різноманітними фірмами.
Можна зіставити приведеним схемам графи, показані на рис.3.6.
а, б, в- графи компонування, що відповідають поданим схемам компонування
У цьому випадку, як приведено в літературі, у матричній формі, рівняння поперечних і подовжніх перемінних будуть мати вид:

щодо подовжніх перемінних

де  і і  квадратні матриці m-ого порядку. квадратні матриці m-ого порядку.
У досліджуваній задачі, якості вхідної поперечної перемінної приймаємо інтенсивність потоку заготівель -  після опрацювання на давильном устаткуванні. У свою чергу, у якості подовжньої перемінної, приймаємо після опрацювання на давильном устаткуванні. У свою чергу, у якості подовжньої перемінної, приймаємо  - інтенсивність потоку під опрацювання на ротаційно-обкатаному устаткуванні. - інтенсивність потоку під опрацювання на ротаційно-обкатаному устаткуванні.
У окремому випадку, зв'язок між поперечної і подовжньої перемінною може бути отримана у виді вираження
 , (72) , (72)
де
 -інтенсивність потоку заготівель до -інтенсивність потоку заготівель до  -ой одиниці устаткування; -ой одиниці устаткування;
 - комплексний показник технологічного процесу, реалізованого на встановленому устаткуванні; - комплексний показник технологічного процесу, реалізованого на встановленому устаткуванні;
 - комплексний показник технічного рівня устаткування; - комплексний показник технічного рівня устаткування;
і  - технологічні параметри системи. - технологічні параметри системи.
Проте вираження (72) являє собою загальний випадок.
Дослідження простих моделей ділянок, показало, що для достатньо ефективного наближенням може бути використання виражень типу:
 (73) (73)
де
 - параметр устаткування, причому - параметр устаткування, причому  і і  . .
Тоді, продуктивність ділянки може бути знайдена по вираженню

Приведене вираження справедливо для всіх трьох випадків гаданого компонування ділянок, мал.4,5.
Причому для різноманітних схем воно одержить різноманітний вид.
У першому випадку його форма будет такой
В другому випадку, вираження получит аналогічну форму
де
 - число верстатів. - число верстатів.
Проте, у третьому випадку вираження для продуктивності буде иметь вид

де
 - інтенсивність вихідного потоку може бути знайдене з вираження (73 ); - інтенсивність вихідного потоку може бути знайдене з вираження (73 );
- число верстатів.
Або
 . .
Це вираження можна ілюструвати графіками, поданими на мал.3.7,8
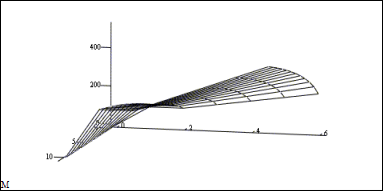
Рис. 3.7- Графік залежності продуктивності П від інтенсивності вхідного потоку  і параметра технологічної системы- s, при числі верстатів = 4 значеннях комплексних показників = 5, = 10 і параметра технологічної системы- s, при числі верстатів = 4 значеннях комплексних показників = 5, = 10
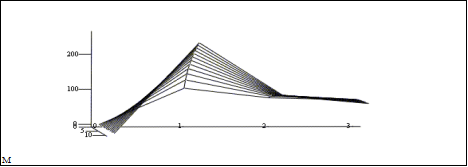
Рис. 3.8- Графік залежності продуктивності П від інтенсивності вхідного потоку і числі верстатів , при значеннях = 2 і комплексних показниках = 5, = 10
Графік ілюструє ріст продуктивності з характерним максимумом при рості параметра, що характеризує технологічну систему.
Графік показує інтенсивний ріст продуктивності при обмеженому числі верстатів і практично постійний її рівень у випадку збільшення числа верстатів, але при сталості інтенсивності вхідного потоку заготівель. Це говорить про недоцільність збільшення числа верстатів на ділянці у випадку, якщо не будуть використані інші критерії оцінки його роботи.
Спочатку можна зажадати максимальної продуктивності ділянки ротаційного обкатування. Хоча це і є недостатньою умовою ефективності роботи ділянки.
Проте, оптимізація роботи ділянки може здійснюватися по декількох критеріях.
Таким чином, оптимізація рішення зводиться до оптимізацію вираження
Оптимізація вираження може бути ефективно виконана за допомогою інструментів "Mathcad-8", "Optimization" або "Matlab ", інструментарій "Optimization".
Приймаючи сталість фазової щільності, що цілком припустимо в наших умовах функціонування вантажопотоків одержимо, що залежність значення вантажопотоку від щільності прийме вид, рис.3.9.
Залежність розміру вантажопотоку від швидкості буде відбита на графіку рис.3.10.
І на графіку, рис.3.11, приведена залежність розміру вантажопотоку від цінового потенціалу.Для побудови імітаційної моделі необхідно скористатися такими рівняннями.
У випадку рівня А, мал.1,ми одержимо такий комплект рівнянь:
;
……………………

……………………;
 ; ;
……………………;
Для рівня У система рівнянь висловиться в такий спосіб:
;
 ; ;
 ; ;
 ; ;
;
 . .
Для рівня С система основних рівнянь прийме вид:
;
 ; ;
;
;
;
.
Крім того, на системи рівнянь повинні бути накладені групи обмежень, що характеризують технічні можливості транспортних систем різноманітного рівня. Крім того, аналогічні обмеження, що стосуються технічних можливостей транспорту, накладаються і на міжрівневий транспорт.
Призводимо ці обмеження.
 - обмеження по швидкості прямування; - обмеження по швидкості прямування;
 - обмеження на пропускну спроможність - обмеження на пропускну спроможність
Останнє, що дозволяє дати замкнуте рішення, ця наявність рівнянь зв'язку між різноманітними рівнями транспортної системи підприємства. Вони можуть бути виражені у виді рівнянь балансу типу:
У поділі присвяченій розробці імітаційної моделі призводимо результати, що характеризують обрані транспортні потоки з заданими параметрами.
Для побудови імітаційної моделі скористаємося системою імітаційного моделювання "Stratum- 2000", розробленої в однім із головних російських університетів.
У моделюючому середовищі Стратум застосовані багато передових технологій - D&D, гипер, видимості периферії, відкритості dll, мультимедиа, 3D, анімація, ієрархія, инструментальність, пряме відео, мережа, об'єктне проектування, стандартний обмін Windows.
D&D-технологія.
Зображення об'єкта може знаходитися у визначених координатах у вікні. Їхнє значення зберігається в перемінних Org і Org. Якщо на поле схеми встановлений імідж Drag&Drop, те вказівка і захоплення мишкою графічного об'єкта, що має ім'я, призведе до керування відповідними координатами. Таким чином, якщо схема використовує значення перемінних Org і Org, те можна маніпулювати віртуальним світом об'єктів на екрані, впливаючи на їхні властивості, модель.
Інтерфейс стає більш природним. Іміджі одержують не вид функціональної схеми, а набору об'єктів із натуральним зображенням, переміщаються в просторі (фізичному, фазовому, геометричному, віртуальному, технологічному і так далі).
Оскільки будь-яке середовище споконвічно обмежене, те важливою властивістю є можливість її розвитки користувачем незалежно від розроблювача. Користувач у стані самий вносити в її зміни за рахунок написання власних іміджів, що стануть його новими інструментами. Можна оголосити власні функції. Можна написати програму обчислення будь-яких дій на мові програмування й оформити їх у виді dll, оголошені в ній функції будуть доступні, видимих із моделі.
Ієрархія.
Схеми й іміджі вступають між собою в явище ієрархії. Імідж може входити до складу схеми. Імідж самий може бути схемою і складатися з іміджів, пов'язаних між собою. Таким чином, можна реалізувати необмежену вкладеність. Можна використовувати також явище рекурсії. Ієрархія підтримує методологію проектування, дає методи боротьби зі складністю, реалізує механізм спадкування, тобто придбання нових рис за рахунок зв'язування окремих незалежних сутностей.
Інструментальність.
Середовище припускає, що вам даються інструменти. Задачу або проект необхідний вам ви виготовте їх за допомогою самостійно. Середовище не є автоматизованим робочим місцем, не алгоритмізує окрему задачу, але сприяє написанню таких продуктів. У порівнянні з відомими інструментальними засобами (FoxPro, Paint, 3DMax і іншими) середовище:
1. об'єднує усі види уявлення інформації в однім продукті (можливість використовувати інші редактори залишається, тому що підтримується Windows стандарт) - музика, зображення (растровое, об'єктне), бази даних, моделі, зображення, відео, і так далі;
2. надає всі параметри кожного з видів інформації для керування їх з одного центру - моделі, що може бути простою структурою даних або потужним рахунковим засобом, що перетворить значення одних параметрів в інші;
3. модель може змінюватися користувачем непрограмістом або інший моделлю, підтримується математична нотація;
4. середовище є відкритої, для користувачів із кваліфікацією програміста даються мовна нотація;
5. середовище реалізує об'єктний принцип проектування і сама є системою проектування.
Об'єктне проектування.
Середовище підтримує процес проектування, дозволяючи проінтерпретувати проект, оживити його, зберегти процес створення проекту, коректувати будь-які складового проекту без зміни інших. Середовище реалізує об'єктний принцип опису сутностей. Середовище дозволяє як функціональний засіб опису, так і об'єктний, підтримується інформаційно-логічний засіб. Використовується математична і мовна нотація, вирішується їхня комбінація.
У цьому випадку користувач у праві самий вирішити, - на якій стадії йому зупинитися: вербальний опис, графічне зображення проекту, функціональний опис, конструктор - інструментарій середовища користувача.
Проектування моделі починаємо в такій послідовності. Попередньо виберемо основний імідж, щовідображає рівень транспортної системи А. Це буде імідж типу StratumClass_726raf_ 611, зробимо запис програмного блока в меню текст і з'єднаємо його з іміджем графічної візуалізації OSCS2D (двумірный осцилограф). З'єднання виконай з поміччю спеціальної лини зв'язку, де установимо властивості зв'язку і його параметри (прошарки), а також зазначимо що переміщаються по цих линах перемінні, див. рис.4.1.
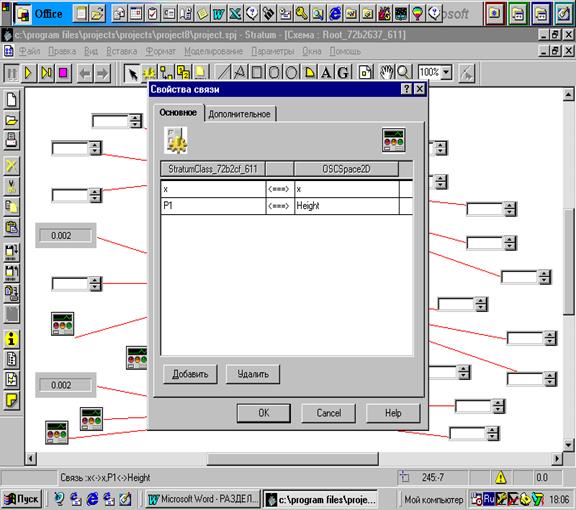
Рис. 4.1- Встановлювані характеристики зв'язку
Для запровадження чисел, що характеризують пропускну спроможність каналу транспортної системи скористаємося іміджами Numberln (поле запровадження числа) і для візуалізації висновка чисельних даних іміджем Numberln ( поле висновка числа). Такий рівень буде відбитий іміджем StratumClass_72е2860_ 611 до якого залучені аналогічні іміджі графічної візуалізації, а також иміджа і висновка цифрової інформації.
І нарешті останній рівень включає імідж StratumClass_72f1f110_611с супутніми іміджами Status_Out і OSCSpace2D.
При цьому, програмний модуль іміджу Numberln, поле запровадження числа має форму
STRING WindowName
HANDLE HSpace
HANDLE local HObject,_HObject
FLOAT local wNotifyCode,msg,rez,_Value
STRING local str
FLOAT Value,Step
FLOAT Org,Org
if (~_Value!= ~Value)
logmessage(String(~Value))
rez:=SetControlText2d(~HSpace,~HObject,String(~Value))
_Value:= ~Value
exit()
endif
if (msg==WM_CONTROLNOTIFY)
if (wNotifyCode==768)
str:=GetControlText2d(HSpace,HObject)
Value:= Float(~str)
if (String(~Value)!=~str)
// rez:=SetControlText2d(HSpace,HObject,str)
Value:= Float(str)
endif
_Value:= ~Value
endif
exit()
endif
if (HObject == #0)
if (WindowName!= "" && (~HSpace==#0)); HSpace:= GetWindowSpace(~WindowName); endif
if (~HSpace == #0); exit(); endif
if (GetWindowProp(GetWindowName(~HSpace),"CLASSNAME")!= GetClassName(".."))
_HObject:= CreateObjectFromFile2D(~HSpace,AddSlash(GetClassDirectory(GetClassName("")))+GetClassName("")+".vdr", Org,Org,PFC_MOVEOBJECT)
endif
HObject:= GetObject2dByName(~HSpace,~_HObject,"edit")
rez:=DelGroupItem2d(~HSpace,GetObjectParent2d(~HSpace,~HObject),~HObject)
if (~HObject)
registerobject(~HSpace,~HObject,"",WM_CONTROLNOTIFY,0)
rez:=SetControlText2d(~HSpace,~HObject,String(~Value))
_Value:= ~Value
endif
endif
У свою чергу програмний модуль того ж іміджу для висновка значень Numberlend View також приобретет такий вид
SetStatusText (pos,string(value))
Загальна структура імітаційної моделі, виконана відповідно до пропозицій поділу, подана на рис.4.2.
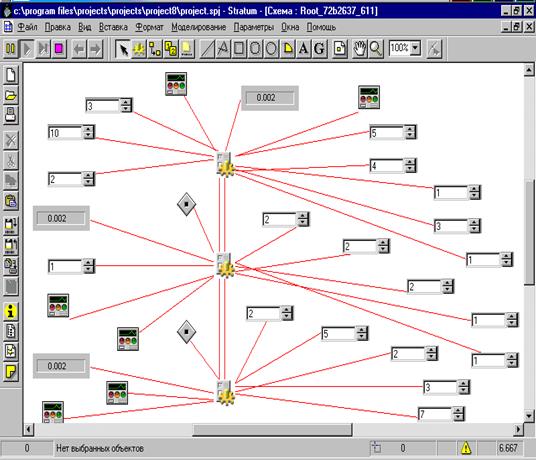
Рис. 4.2- Загальна структура імітаційної моделі в пакеті Stratum- 2000
Основні іміджі Stratum Class, рис. 4.2., подані по вертикалі ВІДПОВІДНО до рівнів А, У,С.
З використанням запису за допомогою ідентифікаторів рівняння балансу виглядають у такий спосіб:
На рівні А, X1-X2-Y1-Y2-Y3=A1, програмний модуль у цьому випадку имеет вид
FLOAT S1,S2,P1,P2,V1,V2,A1,t
t:=1
t:=t+1
x:=1
x:=x+1
b1:=3
a:=1
P1:= -1/b1*(a*f^2)
g1:=5
V1:=g1/P1
b2:=2
f:=3
P2:= -1/b2*(a*f^2)
g2:=2
V2:=g2/P2
S1:=12
X1:=S1*P1*V1*t
S2:=30
Y1:= S2*P2*V2*t
A1:= X1+X2-Y1-Y3
У свою чергу на рівні У, за умови рівняння балансу Y3-X2+Y4-X3 програмний модуль буде мати вираз
b1:=1.5
a:=2
P1:= -1/b1*(a*x^2)
g1:=4
V1:=g1*x^3
P3:= -1/b3*(a*x^2)
b3:=2
g2:=3
V3:=g2*x^3
S1:=40
X1:=S1*P1*V1*t
S3:=23
X3:= S3*P3*V3*t
B1:=Y3-X2-X3+Y4
На останньому з рівнів -С утворюваної моделі, за умови рівнянні балансу типу X3-Y4, програмний модуль буде виглядати в такий засіб
FLOAT S1,S2,P1,P2,V1,V2,C1
b4:= 3
P4:= -1/b4*(a*x^2)
g4:=3
V4:=g4*x^3
C1:= X3-Y4
Y4:= S4*P4*V4*t
На моделі рис.4.2, позначені контактні площадки, вона служать для побудови такого рівня імітаційної моделі і здійснюють передачу перемінних на цей рівень при необхідності декількох перемінних. Отже, модель, подана на мал.1,може бути розвиті і доповнена до необхідного обсягу і рівня складності. Спроможність до розвитку і є особливістю імітаційних моделей, утворюваних у середовищі Stratum.
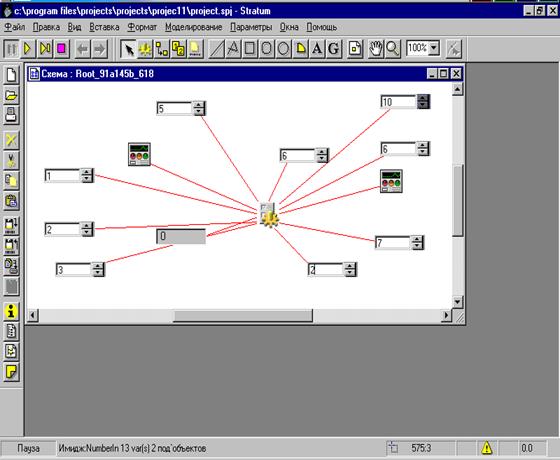
Рис. 4.3 Частина незалежної імітаційної моделі, рівень А
Ілюстрація роботи фрагмента імітаційної моделі,зображеного на рис.4.2, приведена на рис.4.3. а на рис.4.3, подана графічна візуалізація уявлення функцій (1,4,5), розділів., і ілюстрація залежності залишків продукції на рівні А в залежності від часу. Розглядався випадок відсутності вантажопотоків на інші рівні.
Рис. 4.4 Візуалізація результатів при роботі одночасно всієї моделі.
На рис.4.4 подана візуалізація отриманих рішень загальної моделі транспортної системи підприємства. Хибою пакета в цілому, служить відсутність ефективного автомасштабування. Тому для великих багаторівневих моделей припадає подавати результати прогону фрагментами.
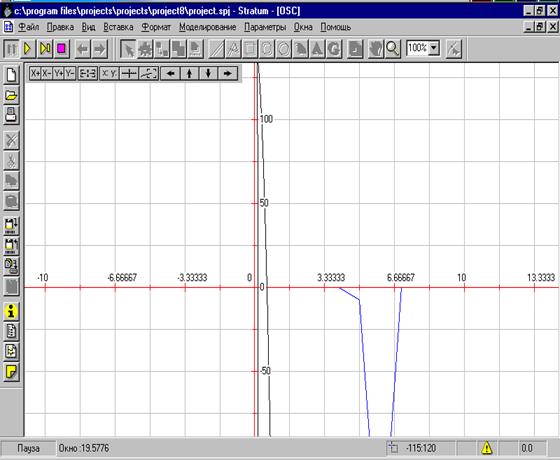
Рис. 4.5 Візуалізація фрагмента результатів прогону загальної моделі
Звертає на себе увага лінійний характер зміни залишків на рівні обслуговування А,У,С и явно нелінійний характер обсягів вантажоперевезень. Це попередньо дає можливість оцінити можливість зміни залишків перевезеної продукції на складах.
Рис. 4.6 Графіки, що ілюструють роботу імітаційної моделі на однім прогоні
Модуль програми двомірного "осцилографа", службовець для візуалізації отриманих результатів призводь нижче. Модуль написаний на специфічній мові Stratum і є розробкою автора роботи.
STRING WindowName
FLOAT Height,Width
FLOAT local ret
FLOAT nosave Offset,Offset,Scale,Scale
FLOAT x,y,Control,PrintValue,PrintValue,Reset,buffer
COLORREF Color
FLOAT _enable
Установка значень змінних виконувалася у вікні, по таблиці, рис.4.7, що варіюються перемінні виділяються автоматично червоним кольором. Автоматично вказується тип змінних.
Рис. 4.7- Установка значень змінних
Після установки перемінних він ініціалізується на зазначеному модулі, для такого модуля процедура установки перемінних повторюється.
Ієрархію встановлених модулів Stratum покажемо на мал. 6. Вона характеризує місце модуля в структурній схемі верб відомій мірі послідовність обчислень приведеної моделі. У верхній частині знаходяться три іміджі Stratum Class_72, а потім OSCSpace 2D, що реалізують візуалізацію обчислень і останніми іміджі типу Numberlend.
Рис.4.8 Ієрархія спроектованої моделі
Ієрархію цілком відповідає структурі проекту.
Аналіз результатів прогону імітаційної моделі достатньо обсяжний і потребує дуже великих витрат часу і засобів. Тому зупинимося на найбільше цікавих із них, що мають можливий вплив на виробничий процес на аналізованому машинобудівному підприємстві.
У першу чергу роздивимося можливу залежність вантажопотоків на наявні або виникаючі виробничі запаси.
На рис. 4.9 подано графік залишків вантажу при наявності двох вантажопотоків, це відповідає нижньому рівню С прийнятої моделі.
Рис.4.9- Залишок вантажів на рівні С прийнятої моделі
Графік свідчить про лінійно залежність розміри залишку від х.
Т.ч. це характеризує той факт, що функція вартісного потенціалу при невеликих змінах мало впливає на накопичення запасів у прийняте моделі і не є керуючим чинником. Це говорить про те, що модель або повинна бути доповнена на іншому рівні або є нечуйним до зазначеного чинника.

Рис.4.10- Зміна залишку вантажу при статечній функції вартісного потенціалу, n=7
У цьому випадку, ми зштовхуємося із ситуацією, коли залишок різко зростає тільки при наявності достатньо великого шляху доставки вантажів. При менших шляхах його просто практично немає. Т.ч., використання імітації дозволило зазначити шляху зменшення залишків на проміжних складах.

Рис.4.11 Зміна функції вартісного потенціалу, при n=3
Графік, рис.11, характеризує зменшення складських запасів при визначеному виді вартісного потенціалу, що дозволяє зробити висновку про засіб скорочення запасів на проміжних складах.
Більш цікавим і актуальним є питання, як ростуть запаси згодом.
На рис.4.12 приведений графік залежності графік залежності залишку вантажу на рівні С від часу  . .

Рис. 4.12 Графік залежності залишків вантажу від часу на рівні С
Залежність носить сугубо лінійний характер. Це свідчить про накопичення залишків протягом часу функціонування системи. Цей результат є показовим і свідчить про необхідність керування процесом доставки і відправлення вантажів. Такий висновок є закономірним, тому що "прогон" імітаційних моделей служить в основному для основи прийняття правильних управлінських рішень як виробничого так і невиробничого характеру.
В роботі проаналізовано стан досліджень в галузі транспортних систем та потоків. Приведені моделі транспортних систем різного призначення.
Проаналізовано моделі систем транспорту різного використання. Розлянуто транспортні потоки, як однопродуктові так і багатопродуктові. Проаналізовані моделі потоків. Приведені засоби оптимізації, а також звісні моделі.
Розроблено математичну модель транспортної системи підприємства з використанням теорії потенціалу. При цьому було встановлено, що:
· Має місто факт залежності розміру вантажопотоку від цінового потенціалу;
· Розміру вантажопотоку  залежить від його щільності; залежить від його щільності;
· Встановлено вид залежності розміру вантажопотоку від швидкості його  ; ;
· Встановлені вирази для обчислювання залишку вантажу на кожному з рівнів.
Спроектовано імітаційну модель транспортної системі підприємства на базі програмного пакету Stratum. На основі прогону моделі получена візуалізація, яка може бути використана при оперативному керуванні підприємством.
Встановлено характер зміни і накопичення залишків на кожному з транспортно-виробничому рівнів.
Зрівняння за фактичними значеннями залишків на рівні С показали адекватність імітаційної моделі. Відхилення не перевищували 15-20% від розрахункового значення.
Проведене зрівняння розрахункових значень залишків з фактичним показало адекватність розробленої моделі.
1 Зельдович Я.Б., Мышкис А.Д. Элементы математической физики. Наука. М.: 2000. 351 с.
2 Джефферсон Г., Свирлс Б. Методы математической физики. М.: Мир. 2001. 311 с.
3 Шеннон Р.Ю. Имитационное моделирование систем- искусство и наука. М.: Мир, 1998. - 237с.
4 Соломатин Н.А и др. Имитационное моделирование в оперативном управлении производством. М.: Машиностроение 1994.- 459 с.
5 Вавилов А.А. Имитационное моделирование производственных систем. Берлин. 1998. – 560с.
6 Вентцель Е.С. Исследование операций. М.: Советское радио.1992. – 550 с.
7 Х. Таха. Введение в исследование операций. М.: Мир. 1995. Т1. 479 с., Т2. 496 с.
8 Програмний пакет "Stratum" 2000-2001.Modeling Laboratory.РЦИ ПГТУ.
9 Резер С.М., Шкультин И.В., Ловецкий С.Е., Бузюк М.А. АСУ взаимодействием видов транспорта. М.: Транспорт, 2003.
10 Ловецкий С.Е., Меламед И.И., Плотинский Ю.М. Модели и методы решения задач маршрутизации на транспортной сети.- В кн.: Итоги науки и техники. Организация управления транспортом. М.: ВИНИТИ, 1999, т3,с.55-112.
11 Черкасский Б.В. Быстрый алгоритм построения максимального потока в сети.- М.: ВИНИТИ? 1999.
12 Моисеенко Г.Е. Декомпазиционный метод решения задачи планирования объёмов перевозок.- М.: Наука,1987.
13 Диниц Е.А. Алгоритм решения задачи о максимальном потоке в сети. М.: Машиностроение 1988.
14 Бурков В.Н., Кондратьев В.В., Молчанова В.А., Щепкин А.В. Модели и механизмы функционирования иерархических систем.- АиТ,1997.
15 Нагаев Б.В. Модель составления развозок грузов.-Ижевск: Удмуртия 1994.-320 с.
16 Мухачева Э.А. Транспортная задача на сети с дополнительными ограничениями.-Экономика и мат.методы,1995.-280 с.
17 Позамантир Э.И. Учёт неравномерности перевозок грузов при планировании транспорта. М.: Транспорт,1994.-250 с.
18 Савин В.И. Оптимизация работы автотранспорта. М.: Транспорт,1994.-280с.
19 Артынов А.П., Скалецкий В.В. Автоматизация процессов планирования и управления транспортными системами.-М.: Наука.1995.
20 Васильева Е.М., Левит Б.Ю., Лившиц В.Н., Нелинейные транспортные задачи на сетях-. М.: Финансы и статистика, 2006.-104с.
|


