Исследование работы колесно-шагающего движителя и двигателя
для передвижения по лестничным маршам
05.05.04 – Дорожные, строительные и подъемно-транспортные машины
Автореферат
диссертации на соискание ученой степени
кандидата технических наук
Москва 2008
ВЕДЕНИЕ
Актуальность темы.
В транспортных устройствах для передвижения по особо сложным препятствием таким, как каменные завалы, ограждения, лестницы гражданских и промышленных зданий нужны рабочие, выполняющие отделочные работы на объектах, при строительстве дорог, а также в аварийных и чрезвычайных ситуациях при выполнении нетрадиционных видов работ.
В движителях особо высокой проходимости также нуждается автомобилестроение, разрабатывающее различного рода транспортные средства для горного туризма, оборонного назначения, а также транспорта для отдыха граждан на природе. Особо важное значение имеет разработка конструкции подобного движителя коляски, в которой остро нуждаются инвалиды для передвижения по лестничным маршам.
В настоящее время указанные трудности не разрешены. В научной литературе и в патентном фонде еще недостаточно материалов для построения конструкции движителя, способного преодолевать такие сложные препятствия, как подъем и опускание по лестничным маршам.
Поэтому тема диссертационной работы является актуальной.
Цель работы:
Разработка конструктивной схемы и определение основных параметров движителя коляски, способного передвигаться по лестничным маршам.
Задачи исследования.
Для осуществления поставленной цели решены следующие задачи:
- Разработаны требования, предъявляемые к конструкциям движителя, способного передвигаться по лестницам стандартных размеров и маневрировать на лестничных площадках.
- Произведено сопоставление кинематических возможностей известных конструкций движителей с разработанными требованиями, и на этой основе выявлены их конструктивные недостатки.
- Разработаны конструкции трех движителей, снабженные шагающими колесами, и определены их основные параметры на основе кинематических и силовых расчетов.
- Разработаны технические предложения на изготовление опытных образцов шагающей коляски, передвигающейся по лестничным маршам.
На защиту выносятся:
- Разработанные требования, предъявляемые к конструкциям движителя, способного передвигаться по лестницам стандартных размеров и маневрировать на лестничных площадках.
Реклама

- Сопоставление кинематических возможностей известных конструкций движителей с разработанными требованиями, и на этой основе выявлены их конструктивные недостатки.
- Разработанные конструкции трех движителей, снабженные шагающими колесами, и определены их основные параметры на основе кинематических и силовых расчетов.
- Разработанные технические предложения на изготовление опытных образцов шагающей коляски, передвигающейся по лестничным маршам.
Научная новизна
заключается в теоретическом обосновании взаимодействия лестницы с шагающим колесом и в разработке конструкции нового шагающего движителя для подъема и опускания груза (инвалида) по лестничным маршам.
Достоверность научных результатов
исследования проверена аналитическими расчетами и экспериментальными исследованиями опытно – экспериментальных образцов инвалидной коляски с шагающими колесами.
Практическая значимость
результатов работы заключается в решении одной из сложных производственно – социологических проблем – создание конструкций коляски, способной передвигаться по лестничным маршам зданий с маневрированием на лестничных площадках как ручным, так и электрическим приводом.
Реализация работы.
По результатом исследования изготовлен уменьшенный действующим макет и экспериментальной образец коляски. Теоретические основы движителя коляски внедрены в учебный процесс КУПС.
Апробация работы.
Основные положения диссертационной работы доложены и получили одобрение на: заседаниях кафедр «ДП и ТМ» и «СТС» (г. Алматы, КУПС), II-ой Международной научно-практической конференции «Транспорт Евразии: взгляд в XXI век» (г. Алматы, 2002 г.); IV-ой Международной научно-практической конференции «Транспорт Евразии: взгляд в XXI век» (г. Алматы, 2004 г.); Республиканской научно-технической конференции с участием зарубежных ученых «Ресурсосберегающие технологии на железнодорожном транспорте» (г. Ташкент, Узбекистан, 2007 г.).
Публикации.
По теме диссертации опубликовано 9 работ.
Структура и объем диссертации.
Диссертация изложена на 95 страницах, состоит из ведения, 4 разделов, заключения, списка использованных источников, содержащего 76 наименований. Диссертация иллюстрирована 46 рисунками и дополнена 2 приложениями.
ОСНОВНАЯ ЧАСТЬ
В первом разделе проводится обзор отечественной и зарубежной литературы, посвященный исследованиям повышения проходимости колесных машин. Отмечены фундаментальные работы Я.С. Агейкина, М.Г. Беккера, В.Ф. Бабкова, А.К. Бидуля, В.М. Сиденко, Г.А. Смирнова, И.А. Бескина, В.И. Кнороз, В.А. Скотникова, А.М. Муратова, Р.И. Сазанбаевой, М.С. Сарыпбекова, А.К. Кайнарбекова и др., а также анализируется работы изобретателей из патентного фонда Республики Казахстан и зарубежных стран по созданию конструкции движителей для передвижения по лестницам жилых и промышленных зданий.
Реклама

Во втором разделе разработаны требования, предъявляемые к конструктивным особенностям движителей, способных передвигаться по лестничным маршам с маневрированием на лестничных площадках. Проанализировано соответствие конструкций известных движителей к разработанным требованиям, и на этой основе выявлены их конструктивные недостатки. Разработаны новые конструктивные решения движителя, который приспособлен к передвижению по сложным препятствиям.
В третьем разделе изложены кинематические и силовые расчеты движителей, оснащенных шагающими колесами. Выбрана наилучшая конструкция шагающего движителя и рассмотрено взаимодействие одиночного колеса со стандартными размерами лестницы, и на этой основе определены его основные параметры. Произведен синтез схемы рабочего органа шагающего движителя первой модификации. А также рассмотрена динамическая модель движителя коляски, обоснованы некоторые её рабочие параметры.
В четвертом разделе разработаны технические предложения для проектирования инвалидной коляски, передвигающейся по лестничным маршам жилых зданий. Построена круговая диаграмма изменения основных параметров коляски, из которой можно легко определять взаимосвязь параметров коляски, изменяя некоторые параметры в ходе проектирования схемы коляски.
Требования, предъявляемые к конструкциям движителя, способного передвигаться но лестничным маршам и межэтажным лестничным площадкам
Выдвигаемые требования к конструкциям движителей, способных передвигаться по лестничным маршам и межэтажным площадкам, разработаны на основе расчетов взаимодействия лестницы с опорными органами движителей, и учтены все необходимые движения для того, чтобы движитель мог подниматься и опускаться по лестнице, а также свободно мог маневрировать на лестничных площадках.
Эти требования следующие:
1. Ограничение габарита.
Согласно стандартному размеру лестничной клетки гражданских зданий, в большинстве случаев отведено одинаковое пространство для установки лестницы. Поэтому габарит движителя для свободного перемещения при подъеме и опускании по лестнице установлен: длина – 1м и ширина – 0,75 метров, а высота не ограничивается. Отклонение допускается на 4 класса размеров, длина 1,05 м; 1,1 м; 1,15 м; 1,20 м; а ширина – 0,75 м, 0,76 м, 0,77 м, 0,78 мм. Все отклонения в сторону увеличения от номинала – 1 м, 0,75 м, снижают оценку качества конструкции.
2. Сложность конструкции.
Сложность конструкции обуславливается многозвенностью и наличием в ней сложно изготавливаемых и прецизионных деталей гидравлических и пневматических устройств. Как правило, сложная конструкция работает не надежно и стоит дорого, а также имеет лишний вес. Поэтому сложность конструкции отрицательно сказывается на качестве.
Установлены 4 степени сложности конструкции:
- к 1 степени сложности относятся простые конструкций, не требующие точной обработки деталей, состоящие из небольшого количества деталей;
- ко 2 степени сложности относятся конструкции движителей, состоящие из многозвенных механизмов, хотя в составе не содержат прецизионные, сложно изготавливаемые узлы и детали;
- к 3 степени сложности относятся конструкции, состоящие из узлов и деталей, изготовление которых требует много станков и оснастки, а также имеющие большой вес;
- к 4 степени сложности относятся конструкции движителей, укомплектованные из различных сложных узлов и прецизионных пар, изготовление которых требует специально оснащенные рабочие места.
3. Маневренность конструкции
.
Маневренность движителя определяется кинематической возможностью поворачиваться на месте или с минимальным радиусом поворота, а также реверсивным ходом вперед и назад. Установлены 4 вида маневренности: 1 вид – поворот относительно вертикальной оси симметрии движителя, 2 вид – поворот относительно вертикальной оси ведущих колес, 3 вид – поворот с радиусом 0,5 м, 4 вид – отсутствие возможности поворота.
4. Проходимость движителя.
Проходимость движителя определяется его способностью преодолевать рельефные и фрикционные препятствия с определенными параметрами. Предусмотрены 4 степени проходимости.
По 1 степени проходимости движитель должен преодолевать неровности поверхности дороги высотой более 2/3 радиуса колеса и любого вида фрикционной сопротивляемости дороги.
По 2 степени проходимости движитель должен преодолевать неровности дороги высотой до 0,5 радиуса колеса и по податливому основанию при погружении колеса до 0,25 радиуса.
По 3 степени проходимости движитель должен преодолевать рельефную поверхность высотой до 0,25 радиуса колеса.
По 4 степени проходимости движитель не рассчитан на преодоление рельефных неровностей и фрикционной сопротивляемости дороги.
5. Универсальность хода
.
Универсальным ходом обладают движители, способные передвигаться одинаково, без скольжения как в ведущем режиме, так и в прицепном режиме. Предусмотрены два вида движителя: 1 вид – движители с универсальным ходом и 2 вид – движители, передвигающиеся только в ведущем режиме.
6. Устойчивость движения
.
Устойчивость движителя определяется по расположению центра масс движителя относительно опорной площадки, образующейся между контактными точками опор. Для каждой конструкции движителя существует определенный угол подъема и опускания, когда направление вектора силы веса выходит из области опорной площадки, т.е. наступает предельная устойчивость. Поэтому установлены 4 шкалы устойчивости, которые не доходят до предела устойчивости:
- 1 шкала устойчивости – 45°;
- 2 шкала устойчивости – 40°;
- 3 шкала устойчивости – 30°;
- 4 шкала устойчивости – 20°.
Шкала устойчивости как угол определяется из треугольника, основанием которого является прямая, соединяющая точки передней и задней опоры движителя. Вершина этого треугольника совпадает с центром масс движителя. Угол шкалы устойчивости отсчитывается от вертикальной прямой, проходящей через точку центра масс до одной из сторон треугольника. Этот угол показывает предельную устойчивость движителя. Чем выше расположен центр масс относительно опорной плоскости, тем меньше угол устойчивости, тем хуже конструкция.
7. Автономность движителя.
Автономность движителя определяется тем, что движитель имеет свой привод и свой источник питания. Для передвижения и маневрирования не нуждается в посторонней помощи. Ходовая часть универсальная, т.е. передвигается одинаково по ровной поверхности и по рельефной, и по податливой поверхности опоры.
Установлено два вида: 1 вид – автономный и 2 вид – неавтономный.
Определение качества конструкции движителя по степени соответствия к установленным требованиям
Сегодняшний потребительский спрос проходимости транспортных средств соответствует выполнению указанных семи требований, каждый из которых имеет четыре шкалы соответствия. Это есть стандарт проходимости транспортных средств. Дальнейший рост потребительского спроса может быть другой, т.е. более ужесточенным. Соответственно с этим и может изменяться стандарт по качеству проходимости транспортных средств.
В данной работе для сравнения качества конструкции своей разработки автор сравнивает ее со всеми известными на сегодня конструкциями движителей, предназначенных для передвижения по лестничным маршам гражданских зданий.
Экраном сравнения является квадратно-координатная сетка, разработанная профессором А. Муратовым.
Из сравнения конструктивных решений, известных до 2007 года движителей, предназначенных для передвижения по лестничным маршам, как в странах постсоветского пространства, так и в дальнем зарубежье, на квадратно-координатной сетке (рисунок 1) видно, что все известные решения основываются на использовании крайне сложных конструктивных элементов, таких как прецизионные механизмы, планетарные зубчатые механизмы, требующие высокой точности изготовления. Как правило, рекомендуются многозвенные механизмы с низким коэффициентом полезного действия. Все это увеличивает мощность двигателя привода движителя. Тогда как источником энергии на таких движителях могут быть только аккумуляторные батарейки.
Рисунок 1 – Квадратно-координатная сетка
Устройство и принцип работы нового предлагаемого движителя для передвижения по лестничным маршам
Предлагаемый движитель, оснащенный шагающим колесом, является самым простым по конструкции движителем, предназначенным для передвижения по лестницам (рисунок 2). Шагающим колесом названо колесо без обода, опирающееся к опоре своими спицами. Опорное устройство с крестовиной, сочлененной несколькими колесами, является известным устройством, также предназначенным для передвижения по лестницам.
Движитель состоит из рамы 1, имеющей кулачковые направляющие 2, и сквозной направляющей 4, выполненный вдоль вертикальной оси симметрии кулачкового направляющего, шагающего колеса, жестко выполненного своей ступицей 5 и снабженного роликовыми опорами 3 в каждой спице. Для обеспечения устойчивости движителя раме на 1 установлено опорное устройство, состоящее из крестовины 6, сочлененной с четырьмя опорными колесами 7. Движитель работает следующим образом: вращение от рычага управления (при ручном приводе) или от привода (при электрическом приводе) передается к шагающему колесу со ступицей 5 и от ступицы 5 передается к раме 1 через направляющий паз 4 рамы.
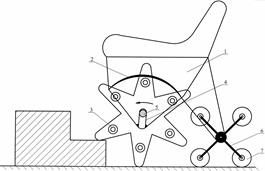
Рисунок 2 – Движитель, оснащенный шагающими колесами
Роликовые опоры 3 шагающего колеса, удерживая рамы, перекатываются по кулачковой направляющей рамы 2.
Взаимодействие лестницы жилых зданий с колесом при подъеме и опускании по лестничным маршам
Рассмотрим процесс взаимодействия шагающего колеса с лестницей (рисунок 3). Для того чтобы при движении по лестнице, спицы шагающего колеса все время наступали на полки лестницы на одинаковом расстоянии от ее кромки, необходимо, чтобы величина радиуса колеса и количество спиц шагающего колеса должны быть взаимосвязанными. Принимаем в расчет общепринятые стандартные размеры полки лестницы. Длина полки L
= 300 мм, высота полки – h
= 150 мм. Шаг шагающего колеса равен хорде «ab
» окружности. Эту хорду обозначим через S
, а дугу окружности, огибающую эту хорду, обозначим соответственно через «D
».
Длина хорды:
 . (1) . (1)
Из треугольника aob
(рисунок 3, a
) можно определить величину радиуса r
шагающего колеса так:
 , (2) , (2)
 . (3) . (3)
Величину угла можно задавать с учетом устойчивости хода шагающего колеса, передвигающегося по лестнице. Этот угол, согласно указанному ограничению, может быть задан меньше чем 90º от линии наклона лестницы (то же самое от хорды S
). Число спиц определяется исходя из условия:
 , (4) , (4)
т.е. длина дуги окружности равна произведению радиуса окружности и растягивающего эту дугу угла из aob
.
 а) а)  б) б)
Рисунок 3 – Взаимодействие шагающего колеса с лестницей
Тогда число спиц равно:
 . (5) . (5)
Если задаться углом:
 , (6) , (6)
 . .
Аналогично определяются параметры опорной части движения, состоящей из крестовины и опорных колесников, исходя из условия взаимодействия лестницы опорным устройством движителя.
Диаметры опорных колес могут быть определены исходя из других условий, т.к. этот параметр не зависит от взаимодействующих параметров лестницы. При проектировании ведущего шагающего колеса стараются закладывать в проект большое количество спиц, т.к. с уменьшением количества спиц, увеличивается амплитуда вертикального колебания колеса при передвижении по ровной дороге.
А при проектировании опорного устройства стараются закладывать в проект как можно меньшее количество спиц крестовины, т.к. опорное устройство при передвижении по ровной поверхности дороги перекатывается с помощью опорных колес. Принято выполнять конструкции крестовины из трех или из четырех спиц. Центр ступицы трехспицевой крестовины располагается ниже четырехспицевой крестовины. Поэтому требуется приложить относительно больше усилий для перешагивания на следующую ступеньку лестницы. Количество спиц также определяется путем задания угла γ из равенства:
 . (7) . (7)
Если задаться  то то  . .
Если задаться  то то  . .
Взаимодействие шагающего колеса с поверхностью дороги
Колеса транспортных средств и опорная поверхность дороги всегда должны быть в контакте и взаимодействовать в зависимости от веса экипажной части. В точке контакта возникает реакция «действие и противодействие взаимодействующих тел». Поэтому возникает и сила трения, и сила сцепления. Величина этих сил будет зависеть от величины внешней силы, осуществляющей замыкание двух тел.
Кроме того, при взаимодействии двух тел всегда возникает деформация самих взаимодействующих тел. Это существенно меняет картину взаимодействия.
Учет всех этих факторов необходим для определения силы сопротивления к качению колеса относительно своей оси вращения. В свою очередь для определения величины движущей силы привода необходимо знать величину силы сцепления, т. е. силы сопротивления, так как в момент трогания с места величина движущей силы равна величине силы сопротивления качению (сила сцепления).
Рассмотрим идеальный случай (рисунок 4, а
), т.е. считается, что соприкасающиеся тела (колеса и дорога) не деформируются.
Вес экипажной части G действует вдоль вертикальной оси колеса, поэтому точка касания находится на этой оси, и реакция N противодействия дороги на действие колеса также будет действовать вдоль этой оси, т.е. G = N.
Сила трения FТP
, являющаяся, в данном случае, единственным сопротивлением, определяет величину силы сопротивления качению, т.е.:
FТР
= fк
N
и MТР
= FТР
R
, (8)
где fк
– коэффициент трения качению, который зависит от материалов соприкасающихся тел;
R
– радиус колеса;
M
ТР
– момент сопротивления трения.
Поскольку коэффициент fк
, который определяется экспериментально и по величине колеблется в пределах от 0,02 до 0,1 в зависимости от материалов соприкасающихся тел, имеет крайне малую величину, поэтому сила сопротивления:
FТР
= fк
G = Рс
, (9)
имеет также незначительную величину. В результате транспортные средства при трогании с места склонны к буксованию. Мощность двигателя будет затрачиваться на разгон буксующегося колеса.
В действительности (рисунок 4, б
), при нагружении деформируются и колеса, и поверхность дороги. В результате они соприкасаются не в точке о
(было бы идеальным случаем), а соприкасаются поверхностью, т.е. на месте соприкосновения образуется площадь (показано штрихом). При вращении колеса возникшее направление нормальной реакции N
проходит не вдоль вертикальной оси колеса, а образует с ней угол  . При этом между точками входа колеса в почву «а
» и выходом «в
» образуется определенный объем грунта. При буксовании колесо выбрасывает этот грунт, а на это затрачивается сила. Сопротивлением качения колеса при этом является не только сила трения FТР
, а еще сила объемного сопротивления грунта дороги. Это очень наглядно видно из взаимодействия шагающего колеса. Для буксования шагающее колесо должно будет срезать заштрихованный на рисунке объем грунта. Тогда общее сопротивление качения равно: . При этом между точками входа колеса в почву «а
» и выходом «в
» образуется определенный объем грунта. При буксовании колесо выбрасывает этот грунт, а на это затрачивается сила. Сопротивлением качения колеса при этом является не только сила трения FТР
, а еще сила объемного сопротивления грунта дороги. Это очень наглядно видно из взаимодействия шагающего колеса. Для буксования шагающее колесо должно будет срезать заштрихованный на рисунке объем грунта. Тогда общее сопротивление качения равно:
Pc
=F+Po
=
 , (10) , (10)
где fk
– коэффициент трения качения;
G
– вес, падающий на ось;
 – коэффициент сдвига грунта дороги; – коэффициент сдвига грунта дороги;
W
– объем сдвигаемого грунта;
– коэффициент искажения веса.
Полученное выражение общего сопротивления качения Рс
одинаково справедливо для пневмоколеса, автотранспорта и для шагающего колеса.
В последнем случае коэффициент искажения веса почти одинаков по сравнению колеса с ободом, а срезаемый объем грунта W
по сравнению с пневмоколесом значительно больше. Поэтому сопротивление качению при взаимодействии шагающего колеса с грунтом значительно больше, чем взаимодействие колеса с ободом, а по твердому грунту практически исключается буксование.
 а) а)  б) б)  в) в)
Рисунок 4 – Схема взаимодействия колеса с грунтом
Спица, наступая на поверхность дороги в точке «а», воспринимает нагрузку движителя G
роликом, расположенным на другом, противоположном от ступицы конце колеса, на расстоянии L
.
Поэтому вес G
создает сопротивляющий, к движению колеса, момент с плечом L · sin
 т.е.: т.е.:
Мс
=G · Lsin.
(11)
Для определения реакции N
со стороны дороги, действующей на спицу шагающего колеса, необходимо перенести силу G
в параллельном направлении в точку «а
» (точку приземления спицы). При этом возникает момент переноса:
Mn
=Q · L=G · Lsin.
(12)
Оттуда определяется сила Q, пара сил в точке «а
»:
Q = Gsin .
(13)
Вектор силы Q проектируется в направлении нормальной реакции опоры, т.е.:
Р= Q sin= G sin.
(14)
Нормальная реакция поверхности дороги в точке приземления «а» будет:
N = G – P = G(I – sin2
) = Gcos2
.
(15)
Как видно, сила реакции N,
определяющая силу трения в точке приземления «а
», меньше веса движителя на множитель cos2
φ
. При φ
= 30 (момент приземления) нормальная реакция будет:
N =
0,74G
.
При φ
= 0 (вертикальное положение спицы):
N = G.
Эта особенность движения шагающего колеса создает неблагоприятное условие сцепляемости колеса при движении, т.к. величина силы трения в точке приземления уменьшается по сравнению с пневмоколесами.
Поэтому шагающее колесо ШКА создает хорошее сцепление при ведущем режиме движения. А в прицепном режиме, когда движущая сила приложена к ступице, создается «ползун», т.е. спица склонна скольжению в точке касания с поверхностью дороги по направлению движения.
Тяговая характеристика коляски, которая анализируется инженерными приемами для оптимальных значений каждого параметра путем анализа на круговой диаграмме. Сущность этого анализа заключается в следующем: из рисунка движителя (рисунок 3) видно, что вес инвалида Q
раскладывается на две силы Q
1
и Q
2
, предложенные в точке а
и в
. Причем:
 , ,
кроме этого:
 . .
Из этой системы легко определить значения Q
1
и Q
2
,
силы которые зависят от значения ℓ
1
и ℓ
2
:
 . .
Рисунок 5 – Схема распределения веса Q
 , ,
 . (16) . (16)
 . (17) . (17)
Прежде всего нужно задаться значением ℓ
1
из конструктивных соображений и определить значения Q
1
и Q
2
из соотношений (2) и (1).
Далее нужно определить момент сопротивления, созданный силой Q
2
относительно точки о
при вращении спицы оа
по ходу стрелки:
 кгс.
м. (18) кгс.
м. (18)
При движении коляски по ровной поверхности опорные колеса не создают момент сопротивления.
Уменьшение силы Р
возможно двумя путями. Первое: путем увеличения длины рычага L
и путем перемещения сидения, куда приложен вес инвалида Q
, так, чтобы составляющая сила Q2
как можно была меньше по величине. Это зависит от плечей ℓ
1
и ℓ
2
. Для более наглядного анализа выбора указанных параметров построена круговая диаграмма (рисунок 6).
Мс
1
= О
.
Полный момент сопротивления:
М
=Мс
2
+ Мс
1
, (19)
Мс
1
= О
.
Рисунок 6 – Круговая диаграмма
При подъеме по лестнице расчеты изменяются, т.к. при подъеме рама коляски становится под углом 26˚÷30˚ и плечо составляющих сил Q
2
и Q
1
изменяется. Кроме того, крестовина опорных колес начнет перешагивать полки лестницы. Поэтому составляющая Q
1
создает начальный момент сопротивления:
Мс
1
= Q
1
R
sin45ºкгс·м.
Полный момент сопротивления:
М
=Мс
1
+ Мс
2
, (20)
Мс
1
≠ О
.
Динамика движителя, оснащенного шагающим колесом
Для определения истинного движения рамы движителя вначале определим угловую скорость шагающего колеса. Поэтому силовые факторы приведем к ступице шагающего колеса (рисунок 7). Обозначим общую массу рамы вместе с массовой экипажной части через m
. Вес рамы экипажной части, приходящейся на одно колесо, обозначим через G,
момент инерции колеса обозначим Jк
.
Угол поворота спицы колеса через  . Тогда уравнение движения имеет вид: . Тогда уравнение движения имеет вид:
 .
(21) .
(21)
Движение рассматривается на участке одного шага, т.к. дальнейшее движение колеса повторяется, т.к.  до . до .
Движущий момент:
 , (22) , (22)
а момент сопротивления:
 , (23) , (23)
 . (24) . (24)
Для преодоления общего момента сопротивления к ступице прикладывается момент, движущий Мдв
, т.е.:
 кгс.
м, (25)
кгс.
м, (25)
где P
– усилие, прикладываемое к рычагу;
L
– длина рычага управления.
Таким образом, для обеспечения легкого управления движением коляски, необходимо по возможности уменьшать усилия Р
, прикладываемые инвалидом для движения коляски.
Момент сопротивления М
с
имеет вначале  со знаком минус, а =0 до =30 знак плюс. Поэтому угловая скорость со знаком минус, а =0 до =30 знак плюс. Поэтому угловая скорость  не будет непостоянной. не будет непостоянной.
Решением дифференциального уравнения является функция:
 . (26) . (26)
Величина  , которая создает неравномерности вращения шагающего колеса, равна: , которая создает неравномерности вращения шагающего колеса, равна:
 , (27) , (27)

Рисунок 7 – Динамика движителя
Движитель коляски также может быть оснащен шагающим колесом модификации В. Движитель состоит (рисунок 8) из общей рамы 1, шагающего колеса, состоящего из шестиспицевого бедра 2 с коленом 3. Последние упруго связаны с бедром в своей средней части с помощью пружины 4, а также опорно-шагающего устройства, содержащего крестовины 5, на конце которой установлены опорные коляски 6.
Рисунок 8 – Движитель модификации В
Движитель работает следующим образом: шагающее колесо с упруго связанным бедром 2 с коленом 3 приводится во вращение с помощью приводного рычага (при ручном приводе) или от механического привода, движение через ступицы шагающего колеса передается к общей раме 1 и оттуда передается к ступице крестовины 5 опорного устройства, которое в прицепном режиме передвигается с помощью опорных колес 6.
Движитель выполнен из простейших деталей, относится к категории простейших конструкций. Для изготовления такой конструкции движителя не требуется многостаночного оборудования и дорогостоящих материалов.
Поворот движителя осуществляется аналогично движителю, оснащенному шагающим колесом ШKA. Конструкция движителя позволяет изменять габаритные размеры для того, чтобы вписаться в стандартную площадь лестничного перехода.
В отличие от движителя, оснащенного шагающим колесом (ШКА) первой модификации А, данная конструкция обладает амортизирующим свойством, поэтому комфортность езды на нем выше.
Конструкция шагающего колеса ШKB может быть использована при конструировании транспортных средств, предназначенных для передвижения в условиях бездорожья. В частности, шагающее колесо ШКВ может быть установлено в движителях, предназначенных для перевозки туристов в горные массивы.
Также подобное колесо может широко использоваться в конструкциях сельскохозяйственных тягачей и прицепных сельскохозяйственных орудиях.
Подобное шагающее колесо с успехом может быть установлено на любой автомобиль, работающий в условиях бездорожья.
Движитель, оснащенный шагающим колесом (ШКС) модификации С
Основным элементом движителя является шагающее колесо (ШКС), которое отличается по конструкции от предыдущих движителей. Остальные элементы этого движителя аналогичны по конструкции с рассмотренными выше движителями.
Шагающее колесо (рисунок 9)построено из двухкривошипного шарнирного четырехзвенного механизма ОВСО. Шесть таких механизмов с одинаковыми длинами звеньев собраны на одном ведущем звене в виде маховика «В». Шатуны – 11', 22', 33', 44', 55' и 66' являются опорами шагающего колеса. При вращении ведущего маховика «В
» ведомые кривошипы – О'Г, 0'2', О'З', G'4',** *0'5' и 0'6', связанные с ведущим маховиком с помощью шатунной опоры, также вращается вкруговую.
Рисунок 9 – Шагающее колесо, построенное из двухкривошипного механизма
Траектория опорной точки А
шатуна является шатунной кривой, близкой по форме к окружности. Особенность этой шатунной кривой использована как траектория опорной точки шагающего колеса. Эта особенность заключается в том, что на отрезке АА'
участок траектории шатунной кривой близок к прямой линии, и на этом участке скорость точки А
– постоянная при постояннойскорости вращения ведущего маховика «В
».
Участок АА'
шатунной кривой соответствует 60° угла поворота ведущего маховика. Поэтому за один полный оборот ведущего маховика «В
» каждый из шести механизмов один раз выполняет рабочий ход па отрезке АА'
, а на остальном отрезке шатунной кривой опорная точка А
этих механизмов совершает холостой ход.
Это шагающее колесо обеспечивает плавность и равномерность движения движителя, хотя оно сложное по конструкции в сравнении с шагающими колесами ШКА и ШКВ.
ЗАКЛЮЧЕНИЕ
1. Разработанные требования, предъявляемые к коляскам для передвижения по лестничным маршам, соответствуют сегодняшним потребительским спросам и стандартным условиям современных жилых и производственных зданий.
2. На сегодня нет полностью завершенных конструкторских разработок, соответствующих современным требованиям, предъявляемым конструкциям инвалидных колясок. Поисковые конструкторские решения, выполненные в данной работе, обнадеживают о возможности создания конструкции инвалидной коляски.
3. Для стандартного размера ступеньки 150×300 мм лестницы соответствуют шагающие колеса длиной спиц, равным 336 мм, и количеством спиц, равным шести. Опорно-шагающее устройство, входящее в конструкцию коляски вместе с двумя шагающими колесами, целесообразно выполнить в виде четырехспицевой крестовины с четырьмя опорными колесами.
4. Шагающие ведущие колеса должны приводиться в движение независимо друг друга как от ручного привода, так и от механического привода.
5. Сидение на раме движителя должно иметь две позиции: передняя и задняя. Сидение должно легко устанавливаться с помощью дополнительного рычага.
6. Габаритные размеры коляски не должны превышать в ширину 70 см, в длину 100 см, а высоты сидения от пола не более 60 см. Передвижение центра тяжести груза (инвалида) по раме движителя обосновано из расчета на устойчивости коляски при подъеме и опускании по лестницам.
7. Все силовые параметры инвалидной коляски могут быть выбраны по оптимальной величине путем использования методики, разработанной в диссертации.
|
