Министерство сельского хозяйства и продовольствия Республики Беларусь
Белорусский Государственный Аграрный Технический
Университет
Кафедра автоматизированных систем управления производством
Курсовая работа
По "Основам автоматики"
Анализ систем автоматического регулирования температуры поливной воды в теплице
Руководитель Гагаков Ю.В
Студента гр. 31а Маркус А.С.
Минск-2008г.
СОДЕРЖАНИЕ
Введение
1. Характеристика объекта управления, описание устройства и работы системы САР, составление ее функциональной схемы. Принцип автоматического управления и вид системы
2. Составление структурной схемы системы
3. Определение закона регулирования системы
4. Определение передаточных функций системы по управляющему и возмущающему воздействиям для ошибок по этим воздействиям
5. Анализ устойчивости системы. Определение запасов устойчивости
6. Анализ зависимости статической ошибки системы от изменения управляющего воздействия на систему
7. Совместный анализ изменения управляемой величины объекта управления и системы от возмущающего воздействия в статике. Определение статической ошибки системы по возмущающему воздействию
8. Оценка качества управления по переходным функциям
9. Общие выводы по работе
Литература
ВВЕДЕНИЕ
Цель работы:
закрепление базовых данных и знаний по курсу "Основы автоматики" на примере проведенных анализов системы автоматического регулирования.
Задание:
1. Дать краткую характеристику объекта управления, описать устройство и работу системы, составить ее функциональную схему. Сделать вывод о принципе автоматического управления, использованном в системе и виде системы.
2. Составить структурную схему системы.
3. Определить закон регулирования системы.
4. Определить передаточные функции системы по управляющему (задающему), возмущающему воздействиям и для ошибок по этим воздействиям.
5. Выполнить анализ устойчивости системы по критериям Гурвица и Найквиста. Определить запас устойчивости.
6. Проанализировать зависимость статической ошибки системы от изменения управляющего (задающего) воздействия на систему. Сделать вывод о характере этой зависимости.
7. Провести совместный анализ изменения управляемой (регулируемой) величины объекта управления и системы от возмущающего воздействия в статике. Дать их сравнительную оценку. Определить статическую ошибку системы по возмущающему воздействию.
Реклама

8. Оценить качество регулирования по переходным функциям.
9. Сделать общие выводы по работе.
Исходные данные:
Схема №19;
К1
=50; К2
=1; Т1
=50 с; Кд
=0,2; Тд
=3 с;
Ку
=40; Кдв
=0,01; Кр
=0,2; Кв
=0,9; Кп
=2; Тдв
=0,5 с;
1. ХАРАКТЕРИСТИКА ОБЪЕКТА УПРАВЛЕНИЯ, ОПИСАНИЕ УСТРОЙСТВА И РАБОТЫ СИСТЕМЫ САР, СОСТАВЛЕНИЕ ЕЕ ФУНКЦИОНАЛЬНОЙ СХЕМЫ. ПРИНЦИП АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И ВИД СИСТЕМЫ

Рисунок 1.1.
САР температуры поливной воды в теплице.
Объектом управления
(ОУ) рассматриваемой САР является скоростной водонагреватель. Регулируемой величиной является температура поливной воды Θ.
Целью управления является постоянное поддержание температуры поливной воды на заданном уровне. Управляющим воздействием на ОУ является расход горячей воды протекающей через скоростной водонагреватель Qв
. Основное возмущающее воздействие – колебание расхода поливной воды, изменение температуры холодной воды поступающей из котельной Θх
.
Датчиком
(Д) является термометр сопротивления совместно с измерительным блоком. Входной сигнал для датчика – температура поливной воды Θ
, выходной сигнал – величина напряжение Uд
.
Задатчиком
является сопротивление R1
. Задающий сигнал – это величина сопротивления R1
, которое в определенном масштабе соответствует заданному значению температуры Θз
в помещении.
Дифференциальный усилитель
(ДУ) выполняет функции устройства сравнения (вычитания) входных сигналов и усиления их разности. На вход усилителя поступают напряжения Uд
, Uз
и напряжение Uос
устройства местной обратной связи. Выходной сигнал усилителя - Напряжение Uу
, подаваемое на электродвигатель.
Исполнительное
устройство
представляет собой исполнительный механизм, который состоит из электродвигателя и редуктора. Входной сигнал для электродвигателя – напряжение U
у
, выходной сигнал – угол поворота φд
вала электродвигателя. Входной сигнал для редуктора -φд,
выходной сигнал - угол поворота валаφр
редуктора.
Устройство
местной
обратной
связи
(УОС) выполнено в виде потенциометрического датчика перемещения, подвижный контакт которого механически связан с выходным валом редуктора. Входной сигнал УОС – угол поворота φр
, выходной сигнал – напряжениеUос
.
Регулирующим
органом
(РО) является регулирующий вентиль для жидкостей. Входной сигнал – угол поворота φр
, выходной сигнал – расход жидкости через вентиль Q
в
.
Реклама

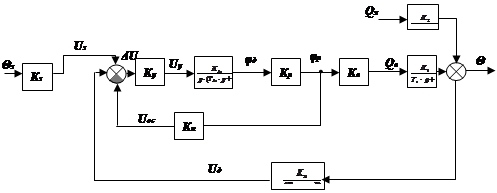
На основании вышеизложенного функциональная схема системы составлена следующим образом:

Рисунок 1.2
Функциональная схема системы.
Система работает следующим образом:
В установившемся режиме при равенстве температуры Θ
в водонагревателе заданной Θз
выходное напряжение дифференциального усилителя U
м
равно 0. При отклонении температуры в водонагревателе от заданной, например, вследствие изменения расхода воды Q
, сопротивление датчика RΘ
изменяется, и через измерительный блок меняет напряжение на входе в дифференциальный усилитель. Напряжение Uy
, являющееся сигналом возникшей ошибки системы, усиливается усилителем и подается на электродвигатель. Двигатель через редуктор открывает заслонку в нужную сторону, тем самым изменяя расход воды проходящей через водонагреватель. Если температура воды ниже заданной, то угол поворота заслонки увеличивается, если температура выше заданной, то угол поворота заслонки уменьшается. Одновременно выходной вал редуктора перемещает подвижный контакт потенциометрического датчика местной обратной связи, выходное напряжение U
ос
которого подается на дифференциальный усилитель. Усилитель усиливает разность напряжений U
д
,
U
з
и U
ос
. За счет местной обратной связи обеспечивается пропорциональная зависимость между напряжением U
д
и углом поворота вала редуктора. Поэтому изменение расхода воды пропорционально величине отклонения температуры воды от заданного значения.
При непрерывном изменении температуры поливной воды процесс регулирования идет непрерывно. Если температура установиться, то при правильно подобранных параметрах регулятора процесс регулирования через некоторое время закончиться и вся система придет в новое установившиеся состояние.
В результате рассмотрения устройства и работы системы можно сделать следующие выводы:
В системе реализован принцип управления по отклонению (ошибке).
Система является стабилизирующей.
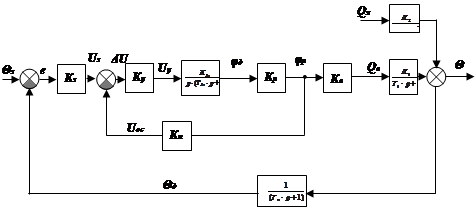
2. СОСТАВЛЕНИЕ СТРУКТУРНОЙ СХЕМЫ СИСТЕМЫ
Структурной схемой называется наглядное графическое изображение математической модели (математического описания) системы.
На структурной схеме каждое звено изображается прямоугольником, внутри которого записывается математическое описание звена. Связи между звеньями структурной схемы изображаются линиями со стрелками, соответствующие направлению прохождения сигналов. Над линиями ставятся обозначения сигналов. Составим структурную схему САР температуры поливной воды в теплице. Для этого получим передаточные функции всех элементов системы:
1.Уравнение скоростного водонагревателя, как объекта управления:
где Θ
– температура поливной воды, о
С;
Q в
– расход воды проходящей через, водонагреватель, м3
/ч;
Θх
– температура холодной воды, о
С;
Изображение Лапласа этого уравнения:

Согласно принципу суперпозиции изменение выходной величины такого звена равно сумме изменений выходных величин по каждому воздействию.
Передаточная функция по управляющему воздействию.
 , ,
Передаточная функция по возмущающему воздействию:
 , ,
Аналогичным образом получим передаточные функции остальных элементов системы:
2. Датчик (термометр сопротивления
c измерительным блоком):
 , ,
где Θ
– измеряемая температура, о
С;
Uд
– напряжение на выходе измерительного блока, Ом;
 , ,
3. Задатчик:



4. Дифференциальный усилитель:


 , ,
6. Двигатель:
 , ,
 , ,
 , ,
7. Редуктор
:
 , ,
 , ,
8. Устройство обратной связи:


8. Регулирующий орган (вентиль для жидкости):


где φ
в
- угол поворота заслонки вентиля, рад
Qв
– расход горячей воды проходящей через водонагреватель.
Составим структурную схему нашей системы:
3. ОПРЕДЕЛЕНИЕ ЗАКОНА РЕГУЛИРОВАНИЯ СИСТЕМЫ
Законом регулирования называют математическую зависимость, в соответствии, с которой управляющее воздействие на объект формировалось бы безинерционным регулятором в функции от ошибки системы.
Закон регулирования во многом определяет свойства системы. Определим закон регулирования рассматриваемой САР температуры поливной воды в теплице. Для этого найдем передаточную функцию, определяющую взаимосвязь управляющего воздействия Qв
на объект и ошибки е:
Предварительно заменим звенья, охваченные местной обратной связью (УОС) с коэффициентом передачи Kп
, одним эквивалентным звеном.
Передаточная функция звена или цепи, последовательно соединенных звеньев, охваченных отрицательной обратной связью, определяется по формуле:

где  - передаточная функция прямой цепи; - передаточная функция прямой цепи;
 - передаточная функция разомкнутой цепи;
- передаточная функция разомкнутой цепи;
 - передаточная функция обратной связи.
- передаточная функция обратной связи.
Подставим в найденное выражение численные значения коэффициентов и получим:
При последовательном соединении звеньев их передаточные функции перемножаются, поэтому

Окончательно для безинерционного регулятора получаем:

Зависимость управляющего воздействия Qв
от ошибки е
показывает, что в рассматриваемой системе применен П-закон регулирования.
4. ОПРЕДЕЛЕНИЕ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ СИСТЕМЫ ПО УПРАВЛЯЮЩЕМУ И ВОЗМУЩАЮЩЕМУ ВОЗДЕЙСТВИЯМ ДЛЯ ОШИБОК ПО ЭТИМ ВОЗДЕЙСТВИЯМ
Для САР температуры поливной воды в теплице задающим воздействием является заданная температура Θз
, регулируемой величиной – температура поливной воды Θ
.
Для рассматриваемой САР температуры поливной воды в теплице, передаточная функция по управляющему воздействию:


= 
Передаточная функция САР по возмущающему воздействию определяет взаимосвязь между изменением регулируемой величины у
и изменением возмущающего воздействия F
.
 , ,
где  - передаточная функция цепи звеньев от места приложения - передаточная функция цепи звеньев от места приложения
Для данной системы передаточная функция САР температуры поливной воды в теплице, по возмущающему воздействию:
 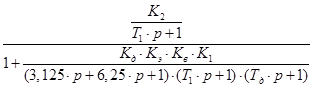 = =


Передаточная функция САР для ошибки по управляющему воздействию определяет взаимосвязь между изменением сигнала ошибки  и изменением задающего воздействия и изменением задающего воздействия  . .
В нашем случае передаточная функция САР температуры поливной воды в теплице для ошибки по возмущающему воздействию:

Передаточная функция САР для ошибки по управляющему воздействию определяет взаимосвязь между изменением ошибки  и изменением возмущающего воздействия F. и изменением возмущающего воздействия F.
5.
АНАЛИЗ УСТОЙЧИВОСТИ СИСТЕМЫ. ОПРЕДЕЛЕНИЕ ЗАПАСОВ УСТОЙЧИВОСТИ
Анализ устойчивости по критерию Гурвица
Устойчивость -
это свойство системы возвращаться в исходный или близкий к нему установившийся режим после снятия воздействия, вызвавшего выход из установившегося режима.
Определим устойчивость САР температуры поливной воды в теплице. Для этого можно воспользоваться любой из полученных в пункте 4 передаточных функций системы, из которых следует это характеристическое уравнение системы:

Для анализа устойчивости воспользуемся непосредственно условиями устойчивости для уравнения четвертой степени:
 >0, >0,  >0, >0,  >0, >0,  >0, >0,  >0; >0;
 >0 >0
Все коэффициенты характеристического уравнения положительны.
Проверим второе условие:
  >0 >0
Полученный результат показывает, что система устойчива.
Анализ устойчивости по критерию Найквиста
Критерий устойчивости Найквиста основан на использовании амплитудно-фазовой частотной характеристики (АФЧХ) разомкнутой системы.
Определим устойчивость САР температуры поливной воды в теплице с данными значениями параметров. Разомкнем систему и запишем ее передаточную функцию:

Все звенья разомкнутой системы устойчивы, поскольку одно звено имеет 2-й порядок, два звена – 1-й порядок и коэффициенты их характеристических уравнений положительны.
Частотная передаточная функция разомкнутой системы:

Представим в виде:



Получаем:


Данные расчета сводим в таблицу:
 |
0 |
0,01 |
0,02 |
0,045 |
0,1 |
0,231 |
1,5 |
2 |
 |
 |
4,55 |
3,45 |
1,8 |
0,013 |
-0,46 |
-0,204 |
-0,0003 |
0 |
0 |
 |
0 |
2,14 |
2,63 |
1,77 |
0,58 |
0 |
-0,001 |
0 |
0 |
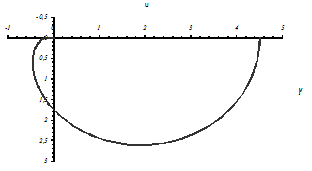
Запас устойчивости по амплитуде для данной САР  =0,8 , по фазе - =0,8 , по фазе -  . Получение значения . Получение значения  и и  удовлетворяют рекомендованным величинам запасов по амплитуде и по фазе. удовлетворяют рекомендованным величинам запасов по амплитуде и по фазе.
Так как АФЧХ разомкнутой системы при изменении частоты от 0 до ∞ не охватывает точку с координатами ( -1 , j0 ), то замкнутая система устойчива.
6.
АНАЛИЗ ЗАВИСИМОСТИ СТАТИЧЕСКОЙ ОШИБКИ СИСТЕМЫ ОТ ИЗМЕНЕНИЯ УПРАВЛЯЮЩЕГО ВОЗДЕЙСТВИЯ НА СИСТЕМУ
При выполнении такого анализа используют передаточную функцию системы для ошибки по управляющему воздействию.
Воспользуемся передаточной функцией для ошибки по управляющему воздействию, полученной в разделе 4 для нашей системы:

В статистике р
обращается в ноль, поэтому
где К
- коэффициент передачи разомкнутой системы.
Таким образом

После подстановки численного значения K
получим  . .
Рассматриваемая система имеет статическую ошибку, пропорциональную изменению управляющего воздействия на систему. Из выражения для статической ошибки следует, что величина статической ошибки тем меньше, чем больше коэффициент передачи разомкнутой системы.
7. СОВМЕСТНЫЙ АНАЛИЗ ИЗМЕНЕНИЯ УПРАВЛЯЕМОЙ ВЕЛИЧИНЫ ОБЪЕКТА УПРАВЛЕНИЯ И СИСТЕМЫ ОТ ВОЗМУЩАЮЩЕГО ВОЗДЕЙСТВИЯ В СТАТИКЕ. ОПРЕДЕЛЕНИЕ СТАТИЧЕСКОЙ ОШИБКИ СИСТЕМЫ ПО ВОЗМУЩАЮЩЕМУ ВОЗДЕЙСТВИЮ
Воспользуемся передаточными функциями объекта управления и системы по возмущающему воздействию.

В статике р
обращается в ноль, поэтому для объекта:


Для системы:


где К
– коэффициент передачи разомкнутой системы.
После подстановки численных значений параметров получаем зависимость изменения давления пара на объекте при изменении расхода пара.
 - для объекта без регулятора; - для объекта без регулятора;
 - для объекта, снабженного регулятором (САР). - для объекта, снабженного регулятором (САР).
Передаточная функция системы для ошибки по возмущающему воздействию:
Поэтому для нашей системы:

Таким образом, температура поливной воды в теплице, не оборудованном регулятором, изменяется также, как изменяется расход воды на полив.
В системе оборудованной регулятором изменение температуры уменьшилось по сравнению с изменением расхода воды в 1+K
раз.
8. ОЦЕНКА КАЧЕСТВА УПРАВЛЕНИЯ ПО ПЕРЕХОДНЫМ ФУНКЦИЯМ
Рассмотрим оценку прямых показателей качества управления нашей системы.
Для переходной функции по управляющему воздействию определяется перерегулирование.
 % %
где  - максимальное значение регулируемой величины в переходном процессе; - максимальное значение регулируемой величины в переходном процессе;  - установившееся значение регулируемой величины. - установившееся значение регулируемой величины.
В нашем случае:
 %= %= %=18,5% %=18,5%
Если нет специальных требований к системе, то нормальным считается перерегулирование  <30%. <30%.
Для переходных процессов по возмущающему воздействию определяется максимальное отклонение регулируемой величины от установившегося значения, приходящееся на единицу возмущающего воздействия F(
t)
:
В нашем случае при F(
t)=1(
t)

Быстродействие системы оценивается временем регулирования. Время регулирования  определяется как интервал времени от начала переходной функции до момента, когда отклонение выводной величины от ее нового установившегося значения становится меньше определенной достаточно малой величины определяется как интервал времени от начала переходной функции до момента, когда отклонение выводной величины от ее нового установившегося значения становится меньше определенной достаточно малой величины  : :
Примем  . В нашей системе для переходной функции по управляющему воздействию: . В нашей системе для переходной функции по управляющему воздействию:

 c. c.
Для переходной функции по возмущающему воздействию:

 c. c.
Колебательность переходного процесса определяется числом N перерегулирования для переходной функции по управляющему воздействию или числом колебаний N
для переходной функции по возмущающему воздействию за время переходного процесса. Для нашей системы N
=2, обычно приемлемым числом колебаний считается N 2…3.
2…3.
Колебательность также оценивается отношением соседних отклонений регулируемой величины от установившихся значений:
В нашей системе для переходного процесса по управляющему воздействию:
Для переходного процесса по возмущающему воздействию:
По переходной функции может быть определена статическая ошибка системы:

где  – заданное значение регулируемой величины. – заданное значение регулируемой величины.
Для нашей системы статическая ошибка по управляющему воздействию:

Статическая ошибка по возмущающему воздействию:

По результатам выполнения раздела 8 для САР регулирования температуры поливной воды в теплице можно сделать следующие выводы:
Для рассмотренной системы перерегулирование составляет 18,5%, число перерегулирований и колебаний системы за время переходного процесса N=2
. Качество системы по этим показателям следует считать удовлетворительным.
Время регулирования составляет около 40 с, максимальное отклонение регулируемой величины от ее установившегося значения, приходящееся на единицу ступенчатого возмущающего воздействия, равно -0,181.
Колебательность системы равна 0, изменение статической ошибки системы при изменении задающего воздействия составляет 18,5%, а возмущающего воздействия составляет 46% от изменения этих воздействий.
9. ОБЩИЕ ВЫВОДЫ ПО РАБОТЕ
Объектом управленияСАР температуры поливной воды в теплице является скоростной водонагреватель. Управляющим воздействием на объект является расход поливной воды протекающей через скоростной водонагреватель. Основное возмущающее воздействие изменение расхода воды на полив.
Закон регулирования - пропорциональный.
Система устойчива. Запас устойчивости по амплитуде 0,8, по фазе 30о
, что удовлетворяет
рекомендованным запасам устойчивости. Система является статической. Статическая ошибка по управляющему воздействию  , статическая ошибка по возмущающему воздействию , статическая ошибка по возмущающему воздействию . .
Прямые оценки качества управления следующие:
Перерегулирование =18,5%; число перерегулирований и колебаний N=2
, что удовлетворяет предъявляемым требованиям; время регулирования составляет около 40 с, максимальное отклонение регулируемой величины от ее установившегося значения, приходящееся на единицу ступенчатого возмущающего воздействия, составляет 0,181;Колебательность системы равна 0. Качество системы следует считать удовлетворительным
.
  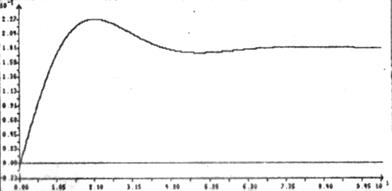
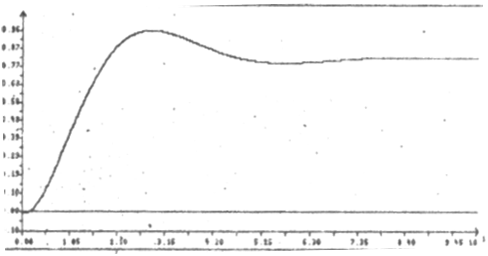
Рис.8.1 Переходная функция по возмущающему воздействию САР температуры в животноводческом помещении.
Литература
1. Юревич Е.Н. "Теория автоматического управления", Л.: Энергия,1975
2. Бородин И.Ф., Кирилин Н.И. "Основы автоматики и автоматизации производственных процессов". М.: Колос, 1977
3. Бабанов Н.А., Воронов А.А. и др. Солодовников В.В., Плотников В.Н., Яковлев А.В. "Основы теории и элементы систем автоматического регулирования". М.: Машиностроение, 1985
4. Бохан Н.И., Бородин И.Ф., Дробышев Ю.В., Фурсенко С.Н., Герасенков А.А. "Средства автоматики и телемеханики". М.: Агропромиздат, 1992
5. Бородин И.Ф. "Технические средства автоматики" М.: Колос, 1982
6. Бохан Н.И., Фурунжиев Р.И. "Основы автоматики и микропроцессорной техники" Мн.: Ураджай,1987
7. Сидоренко Ю.А. "Методические указания к курсовой работе для специальности С.03.02" Минск-2001г.
|
