Министерство сельского хозяйства и продовольствия РБ
Белорусский государственный аграрный технический университет
Кафедра автоматизированных систем управления производством.
КУРСОВАЯ РАБОТА
ТЕМА: “Анализ САР регулирования частоты вращения приводного электродвигателя стенда для обкатки ДВС”
Выполнил: студент 3 курса
11 ЭПТ группы
Давыденков М. А.
Проверил: Дудников И.Л.
Минск 2008 г.
Введение
Цель работы: закрепление базовых знаний по курсу «Основы автоматики» на примере проведения анализа системы автоматического регулирования.
Задание:
Дать краткую характеристику объекта управления, описать устройство и работу системы, составить её функциональную схему. Сделать вывод о принципе автоматического управления, использованном в системе, и виде системы.
Составить структурную схему системы.
Определение закона регулирования системы.
Определить передаточные функции системы по управляющему (задающему), возмущающему воздействиям и для ошибок по этим воздействиям.
Выполнить анализ устойчивости системы по критериям Гурвица и Найквиста. Определить запасы устойчивости.
Проанализировать зависимость статической ошибки системы от изменения управляющего (задающего) воздействия на систему. Сделать вывод о характере этой системы.
Провести совместный анализ измерения управляемой (регулируемой) величины объекта управления и системы от возмущающего воздействия в статике. Дать их сравнительную оценку. Определить статическую ошибку системы по возмущающему воздействию.
Оценить качество управления по переходным функциям.
Сделать общие выводы по работе.
Данные согласно варианту задания сводим в табл. 1.
Таблица 1. Исходные данные.
| вариант |
схема |
К1 |
К2 |
Т1,с |
Кд |
Тд, с |
Ку |
Кдв |
Кр |
Кв |
Кп |
Тдв, с |
| 13 |
20 |
50 |
0,4 |
4 |
0,1 |
0,1 |
50 |
0,002 |
0,1 |
5 |
5 |
0,5 |
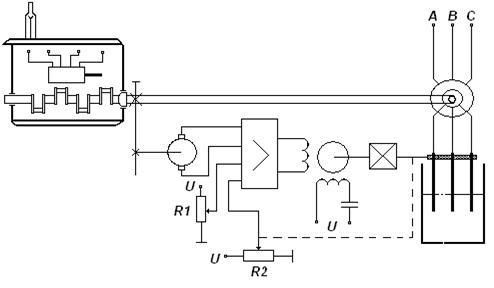 Рис.1 САР частоты вращения приводного электродвигателя стенда для обкатки ДВС.
1. Характеристика объекта управления, описание устройства и работы САР, составление её функциональной схемы. Принцип автоматического управления и вид системы
САР частоты вращения приводного электродвигателя стенда для обкатки ДВС состоит из объекта управления и регулятора.
Объектом управления (ОУ) рассматриваемой САР является асинхронный электродвигатель с фазным ротором. Регулируемой величиной является частота вращения вала двигателя ω. Целью управления является поддержание частоты вращения ω на заданном уровне путем изменения сопротивления в цепи ротора асинхронного электродвигателя. Управляющим воздействием на ОУ является угол поворота вала, присоединенного к реостату, φр. Основное возмущающее воздействие изменение момента сопротивления Мс на валу двигателя.
Реклама

1. Датчиком (Д) является тахогенератор постоянного тока Uд. Входной сигнал для тахогенератора – частота вращения вала двигателя, выходной сигнал – напряжение Uд датчика.
Задатчиком системы является сопротивление R1. Задающий сигнал – это величина напряжения U3, которое в определенном масштабе соответствует заданному значению частоты вращения вала ω.
2. Дифференциальный усилитель (ДУ) 2 выполняет так же и функции сравнивающего устройства (СУ), сравнения (вычитания) входных сигналов и усиления их разности. На вход усилителя поступают напряжения задатчика UЗ , напряжение с тахогенератора UД и Uос устройства обратной связи. Выходной сигнал усилителя - напряжение Uу, подаваемое на электродвигатель 3.
3. Исполнительное устройство представляет собой исполнительный механизм, который состоит из электродвигателя (Дв) 3 и редуктора (Р) 4. Входной сигнал для электродвигателя – напряжение Uу, выходной сигнал – угол поворота φдв вала электродвигателя. Входной сигнал для редуктора - φдв, выходной сигнал - угол поворота вала φр редуктора.
4. Устройство местной обратной связи (УОС) выполнено в виде потенциометрического датчика (6). Входной сигнал УОС – угол поворота φр, выходной сигнал – напряжение Uос.
5. Регулирующим органом (РО) является жидкостной реостат 5 который изменяет сопротивление в роторе электродвигателя 7. Входной сигнал – угол поворота φр, выходной сигнал – сопротивление Rф.
На основании вышеизложенного составлена функциональная схема системы, которая приведена на Рис.2.
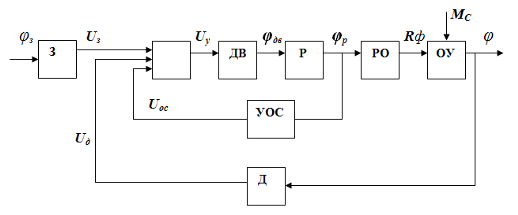
Рис.2 Функциональная схема САР частоты вращения приводного электродвигателя стенда для обкатки ДВС.
Система работает следующим образом:
В установившемся режиме при равенстве частоты вращения ω ротора двигателя заданной ω з , напряжения Uз ,Uос ,Uд взаимно компенсируются и выходное напряжение UУ на ДУ равно 0. При отклонении частоты вращения от заданной, например, из-за изменения момента на валу ДВС Мс, напряжение на выходе датчика Uд изменяется, появится разность напряжений в результате чего на выходе ДУ появится напряжение UУ отличное от нуля. Напряжение UУ подается на электродвигатель. Двигатель через редуктор изменяет положение жидкостного сопротивления, тем самым, увеличивая или уменьшая частоту вращения вала ротора, возвращая её к заданному значению. Одновременно выходной вал редуктора перемещает подвижный контакт потенциометрического датчика местной обратной связи. Выходное напряжение Uос которого подается на ДУ . За счет местной обратной связи обеспечивается пропорциональная зависимость между напряжением Uд и углом поворота вала редуктора.
Реклама

В результате рассмотрения устройства и работы системы можно сделать следующие выводы:
В системе реализован принцип управления по отклонению (ошибке).
Система является стабилизирующей.
2. Составление структурной схемы системы
Для составления структурной схемы получим передаточные функции всех элементов системы.
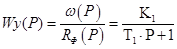
Уравнение объекта управления:
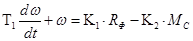
Изображение Лапласа этого уравнения:

Передаточная функция по управляющему воздействию:
По возмущающему воздействию:
Датчик частоты вращения (тахогенератор):

3. Задатчик:

Дифференциальный усилитель:


Двухфазный АД с амплитудным управлением:

Редуктор:

Устройство обратной связи:

Регулируемый жидкостной реостат:

Структурная схема системы показана на Рис. 3
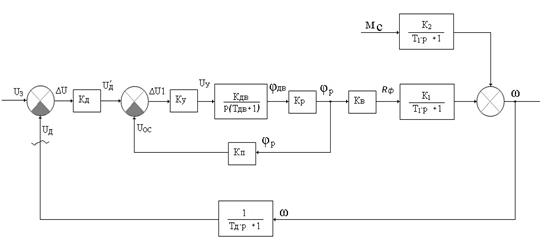
Рис. 3 Структурная схема САР частоты вращения приводного электродвигателя стенда для обкатки ДВС.
Так как задатчик является безинерционным его коэффициент передачи  должен быть равен коэффициенту передачи должен быть равен коэффициенту передачи  датчика, поскольку заданное UЗ и действительное U напряжения должны вычитаться в одном масштабе. Поэтому для наглядности исследования эти коэффициенты датчика, поскольку заданное UЗ и действительное U напряжения должны вычитаться в одном масштабе. Поэтому для наглядности исследования эти коэффициенты  можно перенести за СУ и считать, что из заданного напряжения UЗ непосредственно вычитается измеренное датчиком и формируется сигнал ошибки можно перенести за СУ и считать, что из заданного напряжения UЗ непосредственно вычитается измеренное датчиком и формируется сигнал ошибки  . .
3. Определение закона регулирования системы
Определяем закон регулирования рассматриваемой САР частоты вращения приводного электродвигателя стенда для обкатки ДВС. Для этого найдём передаточную функцию, определяющую взаимосвязь управляющего воздействия RФ на объект и ошибку :
Предварительно заменим звенья, охваченные местной обратной связью (УОС) с коэффициентом передачи Kп, одним эквивалентным звеном.
Передаточная функция цепи охваченной местной обратной связью, определяется по формуле:
Подставим в найденное выражение численные значения параметров и получим:
При последовательном соединении звеньев их передаточные функции перемножаются, поэтому:
Окончательно для безинерционного регулятора получаем:

Зависимость управляющего воздействия RФ от ошибки е показывает, что в рассматриваемой системе применен П-закон регулирования.
4. Определение передаточных функций системы по управляющему и возмущающему воздействиям и для ошибок по этим воздействиям
Передаточная функция САР по управляющему воздействию:

= 
Передаточная функция САР по возмущающему воздействию:
  = =
Передаточная функция САР для ошибки по управляющему воздействию:
Передаточная функция САР для ошибки по возмущающему воздействию:
5. Анализ устойчивости системы. Определение запасов устойчивости
5.1 Анализ устойчивости по критерию Гурвица
Для анализа устойчивости САР частоты вращения приводного электродвигателя стенда для обкатки ДВС воспользуемся любой из полученных в пункте 4 передаточных функций, из которых следует что характеристическое уравнение системы:

Для анализа устойчивости воспользуемся непосредственно условиями устойчивости для уравнения четвертой степени:  >0, >0,  >0, >0,  >0, >0,  >0, >0,  >0; >0;
Все коэффициенты характеристического уравнения положительны.
Проверим второе условие:
  >0 >0
Полученный результат показывает, что система устойчива.
5.2. Анализ устойчивости по критерию Найквиста
Для определения устойчивости САР условно разомкнем систему (место размыкания показано на Рис. 3 волнистой линией):

Все звенья разомкнутой системы устойчивы, поскольку одно звено имеет 2-й порядок, два звена – 1-й порядок и коэффициенты их характеристических уравнений положительны.
Частотная передаточная функция разомкнутой системы.

Подставим в частотную передаточную функцию численные значения параметров.

Для построения АФХЧ разомкнутой системы представим частотную передаточную функцию в виде:
 , ,
тогда
Получаем

Результаты расчета сводим в табл. 2.
Таблица 2. Результаты расчета для построения АФЧХ.
 |
0 |
0,005 |
0,01 |
0,05 |
0,08 |
0,1 |
0,15 |
0,2 |
0,6 |
0,8 |
 |
5 |
4,93 |
4,764 |
1,895 |
0,539 |
0,0684 |
-0,41 |
-0,5 |
-0,15 |
-0,087 |
 |
0 |
-0,596 |
-1,158 |
-2,954 |
-2,511 |
-2,115 |
-1,32 |
-0,82 |
-0,02 |
0,009 |
5.3 Определяем запас устойчивости САР:
Запас устойчивости по амплитуде для данной САР  =0,82 , по фазе - =0,82 , по фазе -  , что удовлетворяют рекомендованным величинам запасов устойчивости по амплитуде и по фазе. , что удовлетворяют рекомендованным величинам запасов устойчивости по амплитуде и по фазе.
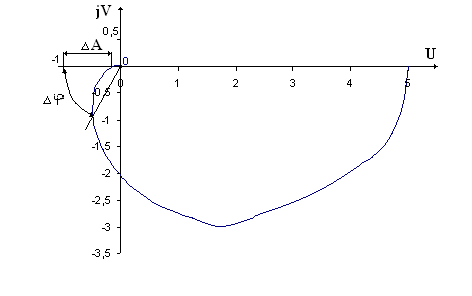
Рис. 4 АФЧХ разомкнутой системы
6. Анализ зависимости статической ошибки системы от изменения управляющего воздействия на систему
При выполнении такого анализа используют передаточную функцию системы для ошибки по управляющему воздействию.
Воспользуемся передаточной функцией для ошибки по управляющему воздействию, полученной в разделе 4 для нашей системы:

В статистике р обращается в ноль, поэтому:
Таким образом:

где К - коэффициент передачи разомкнутой системы.
После подстановки численного значения K получим  . .
Рассматриваемая система имеет статическую ошибку, пропорциональную изменению управляющего воздействия на систему.
7. Совместный анализ изменения управляемой величины объекта управления и системы от возмущающего воздействия в статике. Определение статической ошибки системы по возмущающему воздействию
Воспользуемся передаточными функциями объекта управления и системы по возмущающему воздействию.

В статике р обращается в ноль, поэтому для объекта:
 
Для системы:
После подстановки численных значений параметров получаем зависимость изменения температуры на ОУ от изменения наружной температуры.
 - для ОУ без регулятора; - для ОУ без регулятора;
 - для ОУ, снабженного регулятором. - для ОУ, снабженного регулятором.
Передаточная функция системы для ошибки по возмущающему воздействию:
Поэтому для нашей системы:
Таким образом, температура внутри животноводческого помещения без применения САР изменяется также, как и температура наружного воздуха.
При применении САР частота вращения изменяется примерно на 17% при изменении момента на валу. Это свидетельствует о том, что эксплутационные качества обкатки ДВС существенно улучшились.
8. Оценка качества управления по переходным функциям
8.1 Определение перерегулирования
Для переходной функции по управляющему воздействию (Рис. 5):
 = = =19,2% =19,2%
Для переходных процессов по возмущающему воздействию (Рис. 6)
8.2 Быстродействие системы.
Определим интервал времени от начала переходного процесса до момента, когда отклонение выходной величины от ее нового значения становится меньше определенной величины

Для переходной функции по управляющему воздействию:
  c. c.
Для переходной функции по возмущающему воздействию:
 c. c.
8.3 Колебательность переходного процесса
Определяется числом перерегулирования N для переходной функции по управляющему воздействию или числом колебаний N для переходной функции по возмущающему воздействию за время переходного процесса. Для рассматриваемого процесса N=1.
Для переходных процессов, как по управляющему воздействию, так и по возмущающему воздействию
Но при N=1  , поэтому для переходных функций , поэтому для переходных функций  и и 
8.4 Определение статической ошибки системы по переходной функции
Статическая ошибка по управляющему воздействию:

Что совпадает с результатом, полученным при 
Статическая ошибка по возмущающему воздействию:

Поскольку переходная функция получена при  этот результат совпадает с полученным в пункте 7. этот результат совпадает с полученным в пункте 7.
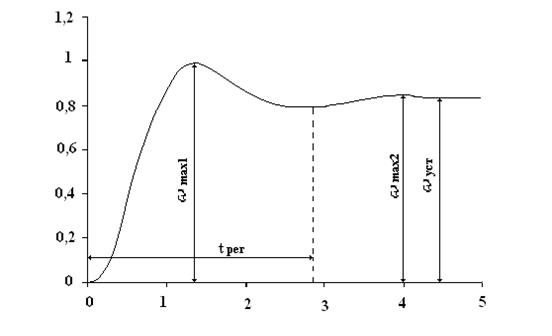
Рис. 5 Переходная функция по управляющему воздействию САР частоты вращения приводного электродвигателя стенда для обкатки ДВС.
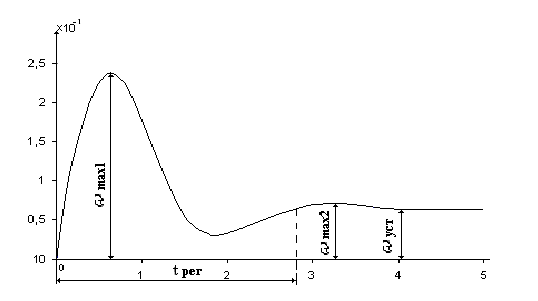
Рис. 6 Переходная функция по возмущающему САР частоты вращения приводного электродвигателя стенда для обкатки ДВС.
9. Общие выводы по работе
Объектом управления САР частоты вращения приводного электродвигателя стенда для обкатки ДВС является асинхронный двигатель с фазным ротором. Управляющим воздействием на ОУ является угол поворота вала, присоединенного к реостату, φр. Основным возмущающим воздействием является изменение момента на валу ротора.
Закон регулирования - пропорциональный.
Система устойчива. Запас устойчивости по амплитуде 0,82, по фазе 61о, что удовлетворяет рекомендованным запасам устойчивости. Система является статической. Статическая ошибка, как по управляющему воздействию, так и по возмущающему воздействию составляет:  и и  . .
Прямые оценки качества управления следующие: перерегулирование  =19,2%; число перерегулирований и колебаний N=1, что удовлетворяет предъявляемым требованиям; время регулирования составляет около 28,80 с, максимальное отклонение регулируемой величины от ее установившегося значения, приходящееся на единицу ступенчатого возмущающего воздействия, составляет 0,086. =19,2%; число перерегулирований и колебаний N=1, что удовлетворяет предъявляемым требованиям; время регулирования составляет около 28,80 с, максимальное отклонение регулируемой величины от ее установившегося значения, приходящееся на единицу ступенчатого возмущающего воздействия, составляет 0,086.
Колебательность системы равна 0.
Качество системы следует считать удовлетворительным.
Список литературы
1. Юревич Е. Н. Теория автоматического регулирования – Л. Энергия, 1975 – 416 с.м.
2. Бородин Н. Ф. Кирилин Н.Н. Основы автоматики и автоматизации производственных процессов.
3. Бабанов Н.А., Воронов А.А. Теория автоматического управления – М. Высшая школа 1986 – 367с.
4. Солодовников В. В., Плотников В. Н., Яковлев А. В. Основы теории и элементы систем автоматического регулирования – М. Машиностроение, 1985 – 536с.
5. Бохан И.И., Бородин Н.Ф., Дробышев Ю.В., Фурсенко С.Н., Герасенков А.А. Средства автоматики и телемеханики – М. Агропромиздат, 1992 – 351с.
6. Бородин Н.Ф. Технические средства автоматики – М. Колос, 1982 – 303с.
7. Бохан Н.Н., Фурунжиев Д.А. Основы автоматики и микропроцессорной техники – Мн., Уроджай, 1987 – 376с.
|
